Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
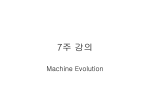
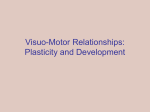
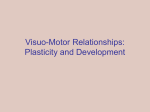
Genetic algorithms for dexterous manipulation Seminar in Machine Learning June 2005 Outline • • • • • Dexterous manipulation Robot hands Genetic algorithms and Genetic programming Biologically inspired robot grasping using GP A biologically inspired fitness function for robot grasping • Conclusions Dexterous manipulation The capability of changing the position and orientation of the manipulated object from a given reference configuration to a different one, arbitrarily chosen within the hand workspace • Dexterous manipulation can be used to increase flexibility and provide richer manipulation patterns Robot hands • Reliability and compactness and the developments of suitable sensors, in particular effective fingertip sensors • Grasp synthesis/Grasp planning • Grasp stability - how many fingers are necessary in order to stably grasp a given object and where should these fingers be placed under various conditions Robot hands • Form and Force Closure Form Closure: the ability of a grasp to prevent motions of the object relying on only unilateral, frictionless contact constraints Force Closure: the situation where motions of the object are constrained by suitably large contact forces of the grasp (usually considering friction) GA and GP • Created by John Henry Holland in 1960’s • AI method that mimics the natural biological processes • Transforms a set of individual mathematical objects by using the Darwinian principle of survival of the fittest Crossover, genetic recombination Mutation Reproduction GA/GP for dexterous manipulation • Initial population of candidate grasps • Each member of the population (grasp) is evaluated for its fitness • The GA evolves the population through a number of generations of candidate grasps • The evolution is guided by a fitness function provided by the user • In the end a final superior grasp population is generated Biologically inspired robot grasping using GP Robot grasping • Use of a GA to solve the grasp synthesis problem for multifingered robot hands • Select a “best” grasp of an object given some information about the object geometry and some user-defined fitness functions • Fitness function is used by the GA to evolve populations of candidate grasps • Provide the operator with a general grasp selection planner which can select and preview candidate grasps across a wide range of objects and tasks Robot grasping • Example with a softball to be grasped by the threefingered Barrett Hand • The program begins with a description of the object to be grasped and an open hand • The program placed imaginary spheres onto the fingertips of the hand • Intersection between the spheres and the object are later used to evaluate when the fingers are in contact and also to adjust the tightness of a grasp • The program positions the object roughly central to the workspace of the hand Robot grasping • Barrett hand with object Robot grasping • Grasp population member and evolution to one-finger contact Robot grasping • Evolution to two-finger and three-finger contact Robot grasping • Final grasp Robot grasping • Grasping procedure A biologically Inspired Fitness Function for Robot Grasping Fitness Function for Grasping • Solutions represented in a tree format • The root node represents the entire hand • Each of the node that branches out represents a different finger • The finger nodes have three additional nodes that represent the position of each joint Fitness Function for Grasping • Representation trees Fitness Function for Grasping • Mutation Fitness Function for Grasping • Crossover Fitness Function for Grasping • Virtual spheres Fitness Function for Grasping • Triangle areas and triangle angles Fitness Function for Grasping • Multiple object planes Fitness Function for Grasping • Raccoon grasping Fitness Function for Grasping • Finger intersections Fitness Function for Grasping • Pseudo equation for the fitness function Fitness function = Area of intersection of virtual spheres (sum in square inches) + Triangle area (in square inches) + Triangle angles (sum in radians) + Number of contact planes (Maximum=9) + Angle between fingers and object (sum in radians) A biologically Inspired Fitness Function for Robot Grasping • Grasping a long object A biologically Inspired Fitness Function for Robot Grasping • Grasping a long object with different orientation... A biologically Inspired Fitness Function for Robot Grasping • Adjusting the fitness function itself to different kinds of objects, raccoon style grasp Conclusions • An approach for guiding grasp selection choices for multifingered robot hands based on GA and GP • Ability of the GA and GP to arrive at sensible grasps from an initial semi-random set of candidate grasps • The approach can result in grasps which would not have been initially selected by the user