Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Relativistic mechanics wikipedia , lookup
Hunting oscillation wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Equations of motion wikipedia , lookup
Virtual work wikipedia , lookup
Electromagnetism wikipedia , lookup
N-body problem wikipedia , lookup
Fictitious force wikipedia , lookup
Centrifugal force wikipedia , lookup
Center of mass wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Centripetal force wikipedia , lookup
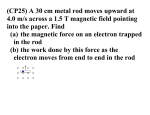
Chapter 13 Equilibrium CHAPTER 13 EQUILIBRIUM When does a structure fall over, when does a bridge collapse, how do you lift a weight in a way that prevents serious injury to your back? We begin to answer such questions by applying Newton’s laws to an object that has neither linear nor angular acceleration. The most interesting special case is when an object is at rest and will stay that way, when it is not about to tip over or collapse. 13-2 Equilibrium EQUATIONS FOR EQUILIBRIUM If the center of mass of an object is not accelerating, then we know that the vector sum of the external forces acting on it is zero. If the object has no angular acceleration, then the sum of the torques about any axis must be zero. These two conditions sum of external forces Σ Fi external = 0 (1) sum of torques about any axis Σ τ i external = 0 (2) i i are what we will consider to be the required conditions for an object to be in equilibrium. Example 1 Balancing Weights As our first example, suppose we have a massless rod of length L and suspend two masses m1and m2from the ends of the rod as shown in Figure (1). The rod is then suspended from a string located a distance x from he left end of the rod. What is the distance x and how strong a force F must be exerted by the string? Solution: The first step is to sketch the situation and draw the forces involved, as we did in Figure (1). Our system will be the rod and the two masses. The external forces acting on this system are the two gravitational forces m 1g and m 2g , and the force of the string F . Since all the forces are y directed, when we set the vector sum of these external forces to zero we have ΣFy = F – m1 g – m2 g = 0 (3) Thus we get for F Equations 1 and 2 are a complete statement of the basic physics to be discussed in this chapter. Everything else will be examples to show you how to effectively apply these equations in order to understand and predict when an object will be in equilibrium. In particular we wish to show you some techniques that make it quite easy to apply these equations. F x L–x F = m1 + m2 g (4) and we see that F must support the weight of the two masses. To figure out where to suspend the rod, we use the condition that the net torque produced by the three external forces must be zero. Since a torque is a force times a lever arm about some axis, you have to choose an axis before you can calculate any torques. The important point in equilibrium problems is that you can choose the axis you want. We will see that by intelligently selecting an axis, we can simplify the problem to a great extent. Our definition of a torque τ caused by a force F is O m2 m1 m2 g m1 g Figure 1 Masses m1 and m2 suspended from a massless rod. At what position x do we suspend the rod in order for the rod to balance? τ = r ×F (5) where r is a vector from the axis O to the point of application of the force F as shown in Figure (2). In this chapter we do not need the full vector formalism for torque that we used in the discussion of the gyroscope. Here we will use the simpler picture that the magnitude of a torque caused by a force F is equal to the magnitude of F times the lever arm r⊥ , which is the distance of closest approach between the axis and the line of action of the force F as shown in Figure (2). If the torque tends to cause a counter clockwise rotation, as it is in Figure (2), we will call this a positive torque. If it tends to cause a clockwise rotation, we will call that a negative torque. 13-3 (In Figure (2), the vector r × F points up out of the page. If the vector F were directed to cause a clockwise rotation, then r × F would point down into the paper. [It is good practice to check this for yourself.] Thus we are using the convention that torques pointing up are positive, and those pointing down are negative.) Returning to our problem of the rod and weights shown in Figure (1), let us take as our axis for calculating torques, the point of suspension of the rod, labeled point O in Figure (1). With this choice, the force F which passes though the point of suspension, has no lever arm about point O and therefore produces no torque about that point. The gravitational force m 1g has a lever arm x about point O and is tending to rotate the rod counter clockwise. Thus m 1g produces a positive torque of magnitude m1 gx. The other gravitational force m 2g has a lever arm (L – x) and is tending to rotate the rod clockwise. Thus m 2g is producing a negative torque magnitude – m2 g L – x . Setting the sum of the torques about point O equal to zero gives m1 gx – m2 g L – x = 0 x = (6) m2 L m1 + m2 (7) We obtained Equation 7 by setting the torques about the balance point equal to zero. This choice had the advantage that the suspending force F had no lever arm and therefore did not appear in our equations. We mentioned earlier that the condition for equilibrium was that the sum of the torques be zero about any axis. In Exercises 1 and 2 we have you select different axes about which to set the torques equal to zero. With these other choices, you will still get the same answer for x, namely Equation 7, but you will have two unknowns, F and x, and have to solve two simultaneous equations. You will see that we simplified the work by choosing the suspension point as the axis and thereby eliminating F from our equation. Exercise 1 If we choose the left end of the rod as our axis, as shown in Figure (3), then only the forces F and m2g produce a torque (a) Is the torque produced by F positive or negative? (b) Is the torque produced by m2g positive or negative? (c) Write the equation setting the sum of the torques about the left end equal to zero. Then combine that equation with Equation 4 for F and solve for x. You should get Equation 7 as a result. Exercise 2 Let us check to see that Equation 7 is a reasonable result. If m1 = m2 , then we get x = L/2 which says that with equal weights, the rod balances in the center. If, in the extreme, m1 = 0 , then we get x = L, which tells us that we must suspend the rod directly over m 2 , also a reasonable result. And if m2 = 0 we get x = 0 as expected. Obtain two equations for x and F in Figure (1) by first setting the torques about the left end to zero, then by setting the torques about the right end equal to zero. Then solve these two equations for x and see that you get the same result as Equation 7 F = m1 g + m2 g r o axis τo = r x F r F Figure 2 The torque τ = r × F has a magnitude τ = r⊥ × F . x axis L m2 Figure 3 Torques about the left end of the rod. m2 g 13-4 Equilibrium But the sum Σ m ix i is by definition equal to M times the x coordinate of the center of mass of the object GRAVITATIONAL FORCE ACTING AT THE CENTER OF MASS When we are analyzing the torques acting on an extended object, we can picture the gravitational force on the whole object as acting on the center of mass point. To prove this very convenient result, let us conceptually break up a large object of mass M into many small masses m i as shown in Figure (4), and calculate the total gravitational torque about some arbitrary axis O. An individual particle m i located a distance xi down the x axis from our origin O produces a gravitational torque τi given by τi = m i g x i (8) where mig is the gravitational force and xi the lever arm. Adding up the individual torques τi to obtain the total gravitational torque τO gives τO = Σ τi = Σ migxi i i (9) = gΣ mixi i MXcom ≡ Σi mixi (10) Using Equation 10 in 9 gives τO = MgXcom (11) Equation 11 says that the gravitational torque about any axis O is equal to the total gravitational force Mg times the horizontal coordinate of the center of mass of the object. Thus the gravitational torque is just the same as if all of the mass of the object were concentrated at the center of mass point. Exercise 3 A wheel and a plank each have a mass M. The center of the wheel is attached to one end of a uniform beam of length L. A nail is driven through the center of mass of the plank and nailed into the other end of the beam as shown in Figure (5). Where do you attach a rope around the beam so that the beam will balance? Explain how you got your answer. rope mi O axis plank mass m xi mi g beam length L Figure 4 Conceptually break the large object of mass M into many small pieces of mass m i , located a distance x i down the x axis from our arbitrary origin O. wheel mass m Figure 5 A wheel and a plank are attached to the ends of a uniform beam. 13-5 TECHNIQUE OF SOLVING EQUILIBRIUM PROBLEMS In our discussion of the balance problem shown in Figure (1), we saw that there were several ways to solve the problem. We always have the condition that for equilibrium the vector sum of the forces is zero ΣiFi = 0 and sum of the torques τ i about any axis is zero Σi τ i = 0 . By choosing various axes we can easily get enough, or more than enough equations to solve the problem. If we are not careful about the way we do this however, we can end up with a lot of simultaneous equations that are messy to solve. Our first solution of the equilibrium condition for Figure (1) suggests a technique for simplifying the solution of equilibrium problems. In Equation 6 we set to zero the sum of the torques about the balance point O shown in Figure (1) reproduced here. We wanted to calculate the position x of the balance point, and were not particularly interested in the magnitude of the force F . By taking the torques about the point O where F has no lever arm, F does not appear in our equation. As a result the only variable in Equation 6 is x, which can be immediately solved to give the result in Equation 7. As we saw in Exercises 1 and 2, if we chose the torques about any other point, both variables x and F appear in our equations, and we have to solve two simultaneous equations. We will now consider some examples and exercises that look hard to solve, but turn out to be easy if you take the torques about the correct point. The trick is to find a point that eliminates the unknown forces you do not want to know about. Example 3 Wheel and Curb A boy is trying to push a wheel up over a curb by applying a horizontal force Fboy as shown in Figure (6a). The wheel has a mass m, radius r, and the curb a height h as shown. How strong a force does the boy have to apply? Solution: We will consider the wheel to be the object in equilibrium, and as a first step sketch all the forces acting on the wheel as shown in Figure (6b). We can treat this as an equilibrium problem by noting that as the wheel is just about to go up over the curb, there is no force between the bottom of the wheel and the road. There is, however, the force of the curb on the wheel, labeled Fcurb in Figure (6b). We know the point at which Fcurb acts but we do not know off hand either the magnitude or direction of Fcurb, nor are we asked to find Fcurb. Fboy h mg Figure 6a A boy, exerting a horizontal force on the axle of a wheel, is trying to push the wheel up over a curb. How strong a force must the boy exert? Fboy F x r Fcurb O L–x O mg no force m2 m1 m2 g m1 g Figure 1 (Repeated) We can eliminate any force by a proper choice of axis. Figure 6b Forces on the wheel as the wheel is just about to go up over the curb. 13-6 Equilibrium We can eliminate the unknown force Fcurb by setting to zero the torques about the point O where the curb touches the wheel. Since Fcurb has no lever arm about this point, it will not appear in the resulting equation. In Figure (6c) we have sketched the geometry of the problem. About the point O the force Fboy has a lever arm (r – h) and is tending to cause a clockwise rotation about point O. Thus Fboy is producing (by our convention) a negative torque, of magnitude Fboy (r – h). The gravitational force mg has a lever arm shown in Figure (6c), and is tending to produce a counter clockwise rotation. Thus it is producing a positive torque of magnitude + mg about point O. Since there are no other torques about point O, setting the sum of the torques equal to zero gives – Fboy(r – h) + mg = 0 Fboy = mg The final slip in solving this problem is to relate the distance to the wheel radius r and curb height h. As shown in Figure (6d), the right triangle from the axle to the curb has sides , (r – h) and hypotenuse r. By the Pythagorean theorem we get r2 = 2 + r– h 2 or = 2 rh– h2 which finishes the problem. (13) Exercise 4 The direction of Fcurb is slightly off in Figure (6b). Explain what would happen to the wheel if Fcurb pointed as shown. (12) r–h r We immediately see that if the curb is as high as the axle, if r = h, there is no finite force that will get the wheel over the curb. 2r Figure 7a A frictionless rod is placed in a hemispherical frictionless bowl. What is the equilibrium position of the rod? Fboy r (r – h) O mg Figure 6c Geometry of the problem. axel r (r – h) curb Figure 6d Figure 7a We simulated a frictionless rod in a hemispherical frictionless bowl by placing ball bearing rollers at one end of the rod and the edge of the “bowl”. The rod always comes to rest at this angle. 13-7 Example 4 Rod in a Frictionless Bowl We include the problem here, first because it gives some practice with what we mean by a frictionless surface, but more importantly it is an example where we can gain considerable insight without solving any equations. You place a frictionless rod of length 2r in a frictionless hemispherical bowl of radius r. Where does the rod come to rest? (Put in just enough friction to have it come to rest.) The situation is diagramed in Figure (7a). In Figure (7b), we have made a reasonably accurate simulation of the problem by using a semi circular piece of plastic for the bowl and placing small rollers on one end of the rod and one rim of the bowl to mimic the frictionless surfaces. In Figure (7c) we have sketched the forces acting on the rod. There is the downward force of gravity mg that acts at the center of mass of the rod, the force Fb exerted by the bowl on the end of the rod, and the force Fr exerted by the rim. The idealization that we have a frictionless surface is equivalent to the statement that the surface can only exert normal forces, forces perpendicular to the surface. Thus the force Fb exerted by the frictionless surface of the bowl is normal to the bowl and points toward the center of the circle defining the bowl. The force Fr between the rim of the bowl and the frictionless rod must be perpendicular to the rod as shown. Off hand we know nothing about the magnitude of the forces Fb and Fr , only their directions. If we extend the lines of action of Fb and Fr they will intersect at some point above the rod as shown in Figure (7c). If we set to zero the sum of the torques about this intersection point, where neither Fb or Fr has a lever arm, then neither Fb or Fr will contribute. The only remaining torque is that produced by the gravitational force mg . If the rod is in equilibrium, then the torque produced by mg about the intersection point must also be zero, with the result that the line of action of mg must also pass through the intersection point as shown in Figure (7d). Thus the rod will come to rest when the center of mass of the rod lies directly below the intersection point of Fb and Fr . This result is nicely demonstrated by comparing the prediction, Figure (7d), with the experiment, Figure (7b). Fr Fr Fb Fb mg mg Figure 7c Figure 7d Forces acting on the rod. Because the bowl is frictionless, Fb is perpendicular to the surface of the bowl. Because the rod is frictionless Fr is perpendicular to the rod. For equilibrium, the center of mass must lie directly below the intersection point of Fb and Fr . 13-8 Equilibrium Exercise 5 A spherical ball of mass m, radius r, is suspended by a string of length attached to a frictionless wall as shown in Figure (8). Exercise 6 Ladder Problem A ladder is leaning against a frictionless wall at an angle θ as shown in Figure (9). Assume that the ladder is massless, and that a person of mass m is on the ladder. (a) show that the line of action of the tension force T (the line of the string) passes through the center of the ball. The force between the ground and the bottom of the ladder can be decomposed into a normal component Fn , and a horizontal component Ff that can exist only if there is friction between the ladder and the ground. (b) find the tension T. It is traditional in introductory texts to say that the ladder will start to slip if the friction force Ff exceeds a value of µFn where µ is called the “coefficient of static friction”. This idea is reasonable in that as the normal force Fn increases, so does the gripping or friction force Ff . However the coefficient µ depends so much upon the circumstances of the particular situation, that the theory is not particularly useful. What, for example, should you use for the value of µ if the ends of the ladder sink down into the ground? T r Figure 8 Ball suspended from a frictionless wall. However for the sake of this problem, assume that the ladder will just start to slip when Ff = µFn . Assume that µ has the value µ = 1/ 3 = .557 . (a) at what angle θ would you place the ladder so that it will not start to slip until the person climbing it just reaches the top? (b) at what angle θ would you place the ladder so that it will not start to slip until the person has gone half way up? frictionless surface θ person of mass m massless ladder mg Fn Fn Ff = µF Figure 9 Ladder leaning against a frictionless wall. 13-9 Example 5 A Bridge Problem A bridge is constructed from massless rigid beams of length . The ends of the beams are connected by a single large bolt that acts more or less like a big hinge. As a result the only forces you can have in each beam is either tension or compression (i.e. each beam either pulls or pushes along the length of the beam.) The idea is to be able to calculate the tension or compression force in any of the beams when a load is placed on the bridge. In this example, we will place a mass m in the center of the right most span as shown in Figure (10a). To illustrate the process of calculating tension or compression in the beams, we will calculate the force in the upper left hand beam. For now we will assume that the beam is under tension and exerts a force Td on joint d as shown. If it turns out that the beam is under compression, then the magnitude of Td will turn out to be negative. Thus we do not have to know ahead of time whether the beam is under tension or compression. Solution: When you have a statics problem involving an object with a lot of pieces, and you want to calculate the force in one of the pieces, the first step is to isolate part of the object and consider that as a separate system with external forces acting on it. In Figure (10b) we have chosen as our isolated system the part of the bridge made from the girders that have been drawn in heavy lines. The external forces acting on this isolated system are the gravitational force mg acting on the mass m, the supporting force F2 that holds up the right end of the bridge, (we will assume that the ends of the bridge are free to slide back and forth, so that the supporting forces F1 and F2 point straight up). In addition the tension (or compression) forces we have labeled Td , Tc1 and Tc2 are also acting on our isolated section of the bridge. Looking at Figure (10b), it is immediately clear that the forces we do not want to know anything about are the tension forces Tc1 and Tc2 . We can eliminate these forces by setting to zero the torques about the joint labeled c. Using our convention that counter clockwise torques are positive and clockwise ones are negative, we get ΣTabout c = F2 2 – mg 3 2 + Td 3 2 In Equation 13 we have two unknowns, F2 and Td Thus we need another equation. If we take the bridge as a whole, and calculate the torques on about the point a (to eliminate the force F1 ), we get ΣT about a = F2 3 – mg (14) = 0 Solving Equation 14 for F2 gives F2 = 5 mg 6 (15) Using this value in Equation 13 gives Td = – mg 3 3 (18) The minus (–) sign indicates that the beam is under compression. Exercise 7 Find the tension (or compression in the beam that goes from point (d) to point (e) in the bridge problem of Figure (10a). Td b d f a g m c e mg Figure 10a Bridge with a truck on the last span. Td d b f h= = 0 Tc2 a Tc1 c (13) where we used the fact that Td's lever arm h is the altitude of an equilateral triangle. 5 2 g m e 2 F1 mg 2 F2 Figure 10b Finding the tension in the span from b to d. 3 2 13-10 Equilibrium Exercise 8 Working with Rope As most sailors know, if you use rope correctly, you can create very large tension forces without exerting that strong a force yourself. Suppose, for example, you wish to make a raft out of two long logs with two short spacer planks between them as shown in Figure (11a). You wish to hold the raft together with a rope around the center as shown. The first step is to tie, as tightly as you can, the logs together as shown in the end view of Figure (11b). Then take another piece of rope and tie it as tightly as you can as shown in Figure (11c). If you do a reasonably good job, you can create a large tension in the rope holding the logs together. To analyze the problem, let T1 be the tension in the rope holding the logs together, and T2 the tension in the line between the ropes as shown in Figure (11d). For this problem, assume that angle θ in Figure (11d) is 5 degrees, and the tension T2 that you could supply in winding the line around the ropes was 200 newtons (enough force to lift a 20 kilogram mass). What is the tension T1 in the ropes holding the logs together? Figure 11a Constructing a raft by tying two logs together, with wood spacers. Figure 11b End view of raft. Figure 11c Tightening the rope. θ T1 T1 T2 Figure 11d Tensions in the ropes. 13-11 LIFTING WEIGHTS AND MUSCLE INJURIES The previous exercise on tying a raft together illustrates the fact that with some leverage, you can create large tensions in a rope. Similar large forces can exist in your muscles when you lift weights, particularly if you do not lift the weights properly. To illustrate the importance of lifting heavy objects correctly, consider the sketch of Figure (12) showing a shopper holding a funny looking 10 kg shopping bag out at arms length. We wish to determine the forces that must be exerted on the backbone and by the back muscles in order to support this extra weight. To analyze the forces, think of the upper body and arm as essentially a rigid object supported by the backbone and back muscles as shown. Since we are interested in the extra forces required to lift the weight, we will ignore the weight of the upper body itself. The external forces acting on the upper body are the upward compressional force Fb acting on the backbone, and the downward force Fm acting at the point where the back muscle is attached to the thighbone. (This is in reaction to the upward force exerted on the thigh bone by the contacting back muscle.) There is also the weight mg of the shopping bag. We are letting L be the horizontal distance from the backbone to the shopping bag, and the separation between the point where the thigh bone pushes up on the backbone and pulls down on the back muscle. If we want to solve for the force Fm exerted by the back muscle we can eliminate Fb from our equation by setting to zero the sum of the torques about point b, the point where the thigh bone contacts the backbone. We get Σ τ about b = F m – MgL = 0 F m = mg L (9) We see that the back muscle has to pull down with a force that is a factor of L / times greater than the weight mg of the shopping bag. With = 2 cm , you see that if you hold the shopping bag out at arms length, say L = 80 cm, then Fm is L / = 40 times as great as the weight of the shopping bag. For you to lift a 10 kg bag at arms length, your back is essentially lifting a 10 kg × 40 = 400 kg mass, which has a weight of almost half a ton! If instead you pulled your arm in so that L was only 20 cm, then Fm drops 1/4 of its original value. Do your back a favor and do not lift heavy objects out at arms length. Exercise 9 Write a single equation that allows you to solve for the compressional force Fb exerted on the backbone, as shown in Figure (12). = 2 cm L = 80 cm funny looking shopping bag mg back muscle b Fb Fm Figure 12 Forces on the backbone . 13-12 Equilibrium calf muscle Exercise 10 Figure (13) shows the structure of the lower leg and foot. Assume that this person is raising her heel a bit off the ground, so that her foot is touching the floor at only one place, namely the point labeled P in the diagram. Also assume that the calf muscle is attached to the foot bones at the point labeled (a), and that the leg bone acts at the pivot point (b). If her mass is 60 kilograms, what must be the forces exerted by the calf muscle and the leg bone? Compare the strength of these forces with her weight. (This and the next problem adapted from Halliday & Resnick.) leg bone a Exercise 11 The arm in Figure (14) is holding a 20 kilogram mass. The arm pivots around the points marked with a small black circle. What is the compressional force on the bones in this joint? (Neglect the mass of the arm.) P 5 cm Figure 13 Foot muscle m pivot point 30 cm 3.5 cm Figure 14 Arm b 15 cm 13-13 Index B Balancing weights, equilibrium 13-2 C Center of mass Gravitational force acting on 13-4 E Equilibrium Balancing weights 13-2 Chapter on 13-1 Equations for 13-2 Example - bridge problem 13-9 Example - wheel and curb 13-5 How to solve equilibrium problems 13-5 Working with rope 13-10 G Gravity Gravitational force acting at center of mass 13-4 L Lifting weights and muscle injuries 13-11 M Muscle injuries lifting weights 13-11 R Rope, working with 13-10 S String forces Working with rope 13-10 W Weight Lifting 13-11 X X-Ch13 Exercise 1 13-3 Exercise 2 13-3 Exercise 3 13-4 Exercise 4 13-6 Exercise 5 13-8 Exercise 6 Ladder problem 13-8 Exercise 7 13-9 Exercise 8 Working with rope 13-10 Exercise 9 13-11 Exercise 10 13-12 Exercise 11 13-12