Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Negative mass wikipedia , lookup
Artificial gravity wikipedia , lookup
Fictitious force wikipedia , lookup
Coriolis force wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Torque wrench wikipedia , lookup
Weightlessness wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Centrifugal force wikipedia , lookup
Friction-plate electromagnetic couplings wikipedia , lookup
Rotational spectroscopy wikipedia , lookup
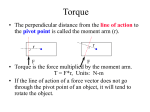
Unit 6 Notes: Part 2 – Corresponds to Chapter 8 of text 1. Torque – the ability of a force to rotate an object around some axis a. Net torque produces rotation b. Occurs around an axis of rotation – usually a hinge. i. Imaginary line passing through a hinge 2. Torque depends on force and lever arm a. Ease of rotation depends on: i. How much force is applied ii. Where the force is applied 1. Farther from the axis of rotation the easier the rotation 2. More torque produced b. Lever arm – perpendicular distance from axis of rotation to a line drawn along the direction of the force i. Distance of lever arm = d ii. Shorter lever arm = smaller torque 3. Torque depends on the angle between force and the lever arm a. Changing the angle will change the ease that the object will move with b. Torque = () = Greek letter Tau c. SI unit = N • m d. Torque is (+) or (-) depending on direction of the rotation i. (+) When rotation is counterclockwise ii. (-) When rotation is clockwise e. When more than 1 force causes rotation then net torque is the sum of all torques involved. 4. Center of Mass – point at which all of the mass of the body can be considered to be concentrated when analyzing transitional motion. a. Regular shaped objects (i.e. sphere, cube) center of mass is at the geometric center of the object. i. Different for oddly shaped objects ii. Average position of an object’s mass b. Center gravity – an average position at which the gravitational force of the object acts. i. In this book Center of Mass and Center of Gravity are equivalent. 5. Moment of Inertia a. Moment of Inertia –measure of the resistance of an object to changes in rotational motion i. (I) ii. Indicates how much an object’s rotation will change with a force iii. Depends on: 1. Object’s mass 2. Distribution of mass around the axis of rotation iv. Farther the mass is from the axis of rotation 1. More difficult to rotate 2. Greater moment of inertia v. Closer mass is to axis of rotation 1. Less difficult to rotate 2. Smaller moment of inertia 1 6. Calculate Moment of Inertia a. When net torque acts on an object, the resulting change in rotational motion depends on the object’s moment of inertia b. Table 8-1 on pg. 234 helps you calculate the moment of inertia for common shapes c. SI units i. Kg • m2 d. Only the distance of a mass from the axis of rotation is important in determining the moment of inertia for a shape 7. Rotational equilibrium a. If 2 forces acting on an object are equal in magnitude and opposite in direction, the object will rotate in place. b. Translational equilibrium – net force on an object is equal to zero c. Rotational equilibrium – net torque on an object is equal to zero 8. Rotational Dynamics a. Newton’s 2nd law for Rotating Objects i. net = Iα 1. I = moment of inertia 2. α = angular acceleration 3. (+) or (-) depending on direction of b. Translational vs. Rotational i. F = ma ii. net = Iα 9. Momentum a. Angular momentum (L)- product of a rotating objects moment of inertia and angular speed around the same axis i. L = Iω 1. I = moment of inertia 2. ω = angular speed ii. Kg • m2/s → derived from (Kg • m2) (rad/sec) (Rad have no value) b. L may be conserved i. Law of conservation of L – When τnet = 0 and ∆L = 0 1. A skater spinning with arms out spins slower than when he/she brings arms in a. More mass is brought closer to the body therefore decreasing “I” therefore, increasing “ω” to compensate for decreased “I”, “L” is conserved 2