Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Eigenstate thermalization hypothesis wikipedia , lookup
Internal energy wikipedia , lookup
Fictitious force wikipedia , lookup
Jerk (physics) wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Old quantum theory wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Brownian motion wikipedia , lookup
Classical mechanics wikipedia , lookup
Mass versus weight wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Deformation (mechanics) wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Seismometer wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Viscoelasticity wikipedia , lookup
Equations of motion wikipedia , lookup
Hunting oscillation wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Centripetal force wikipedia , lookup
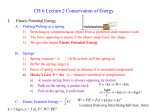
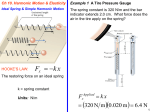
Chapter 10 – Simple Harmonic Motion and Elasticity 10.1 – The Ideal Spring and Simple Harmonic Motion 𝐹Applied = 𝑘𝑥 (Equation 10.1) Where k is the spring constant and has the units of N/m. (k is sometimes referred to as the stiffness of the spring because the larger the k value the more “stiff” the spring.) A spring that behaves according to this equation is called an ideal spring. Hooke’s Law Restoring Force of an Ideal Spring The restoring force of an ideal spring is 𝐹 = −𝑘𝑥 (10.2) Where k is the spring constant and x is the displacement of the spring from its unstrained length. The minus sign indicates that the restoring force always points in a direction opposite to the displacement of the spring. When the restoring force has the mathematical form given by F = -kx, a type of friction-free motion it will show a “simple harmonic motion”. The maximum excursion from equilibrium is the amplitude A of the motion. The shape of this graph is characteristic of simple harmonic motion and is called “sinusoidal,” because it has the shape of a trigonometric sine or cosine function. The restoring force also leads to simple harmonic motion when the object is attached to a vertical spring, just as it does when the spring is horizontal. Although when a spring is vertical the weight of the object causes the spring to stretch, and the motion occurs with respect to the equilibrium position of the object causes the spring to stretch. The amount of initial stretching d0 due to the weight can be calculated by equating the weight to the magnitude of the restoring force that supports it; thus mg = kd0, which gives d0 = mg/k. Section 10.1 Practice Problems: 1, 6 Homework: 2-5 10.2 – Simple Harmonic Motion and the Reference Circle Simple harmonic motion can be described in terms of displacement, velocity and acceleration. Displacement Where we can find the displacement of an object (with simple harmonic motion) using 𝑥 = 𝐴𝑐𝑜𝑠𝜃 = 𝐴𝑐𝑜𝑠𝜔𝑡 (10.3) where 𝜃 = 𝜔𝑡. The time to complete one full cycle is the period T. The value T depends on the angular speed ω of the object because the greater the angular speed, the shorter the time it takes to complete on revolution. 2𝜋 𝜔= (ω in rad/s) (10.4) 𝑇 Instead of the period, it is more convenient to speak of the frequency 𝑓 of the motion, the frequency being just the number of cycles of the motion per second. 𝑓= 1 (10.5) 𝑇 Usually one cycle per second is referred to as one hertz (Hz). 𝜔= 2𝜋 𝑇 = 2𝜋𝑓 (ω in rad/s) (10.6) Because ω is directly proportional to the frequency 𝑓, ω is often called the angular frequency. Velocity The velocity of an object with simple harmonic motion is given by 𝑣 = −𝐴𝜔 sin 𝜃 = −𝐴𝜔 sin 𝜔𝑡 (ω in rad/s) (10.7) This velocity is not constant, but varies between maximum and minimum values as time passes. When the object changes direction at either end of the oscillatory motion, the velocity is momentarily zero. When the object passes through the x=0 position, the velocity has a maximum magnitude of Aω, since the sine of an angle is between +1 and -1: 𝑣𝑚𝑎𝑥 = 𝐴𝜔 (ω in rad/s) (10.8) Both the amplitude A and the angular frequency 𝜔 determine the maximum velocity. Acceleration The acceleration in simple harmonic motion becomes 𝑎 = −𝐴𝜔2 𝑐𝑜𝑠𝜃 = −𝐴𝜔2 𝑐𝑜𝑠𝜔𝑡 (ω in rad/s) (10.9) The acceleration changes as time passes and the maximum magnitude of the acceleration is 𝑎𝑚𝑎𝑥 = 𝐴𝜔2 (ω in rad/s) (10.10) Frequency of vibration The angular frequency of simple harmonic motion is 𝑘 𝜔=√ 𝑚 (ω in rad/s) (10.11) Where k is the spring constant and m is the mass. Section 10.2 Practice Problems: 14, 17 Homework: 15, 16, 18 10.3 Energy and Simple Harmonic Motion A spring also has potential energy when the spring is stretched or compressed, which is called elastic potential energy. The work Welastic done by the average spring force is, then 1 𝑊𝑒𝑙𝑎𝑠𝑡𝑖𝑐 = (𝐹̅ cos 𝜃)𝑠 = 2(𝑘𝑥0 +𝑘𝑥𝑓) cos 0°(𝑥0 − 𝑥𝑓 ) 1 1 2 2 𝑊𝑒𝑙𝑎𝑠𝑡𝑖𝑐 = 𝑘𝑥02 − 𝑘𝑥𝑓2 (10.12) Definition of elastic potential energy The elastic potential energy PEelastic is the energy that a spring has by virtue of being stretched or compressed. For an ideal spring that has a spring constant k and is stretched or compressed by an amount x relative to its unstrained length, the elastic potential energy is 1 𝑃𝐸𝑒𝑙𝑎𝑠𝑡𝑖𝑐 = 𝑘𝑥 2 (10.13) 2 SI Unit of Elastic Potential Energy: joule (J) Now we will include the elastic potential energy into the equation for the total mechanical energy. 𝐸 = 1 2 𝑚𝑣 2 + Total Translational mechanical kinetic energy energy 1 2 𝐼𝜔2 + 𝑚𝑔ℎ + Rotational kinetic energy Gravitational potential energy 1 2 𝑘𝑥 2 (10.14) Elastic potential energy If external nonconservative forces like friction do no net work, the total mechanical energy of the system is conserved: 𝐸𝑓 = 𝐸0 Section 10.3 Practice Problems: 25, 30 Homework: 24, 26-29 10.4 – The Pendulum A simple pendulum consists of a particle of mass m, attached to a frictionless pivot P by a cable of length L and negligible mass. When the particle is pulled away from its equilibrium position by an angle θ and released, it swings back and forth. The force of gravity is responsible for the back-and-forth rotation about the axis at P. The rotation speeds up as the particle approaches the lowest point on the arc and slows down on the upward part of the swing. Eventually the angular speed is reduced to zero and the particle swings back. The small-angle (≤ 10°) back-and-forth swinging of a simple pendulum is simple harmonic motion, but large-angle movement is not. The frequency 𝑓 of the motion is given by 𝑔 2𝜋𝑓 = √ 𝐿 (small angles only) (10.16) A physical pendulum consists of a rigid object, with moment of inertia I and mass m, suspended from a frictionless pivot. For small-angle displacements, the frequency 𝑓 of simple harmonic motion for a physical pendulum is given by 𝑚𝑔𝐿 2𝜋𝑓 = √ 𝐼 (small angles only) (10.15) where L is the distance between the axis of rotation and the center of gravity of the rigid object. It is not necessary that the object is a particle, it may be an extended object, in which case the pendulum is called a physical pendulum. For small oscillations, equation 10.5 still applies, but the moment of inertia I is no longer 𝑚𝐿2 . The proper value for the rigid object must be used. In addition, the length L for a physical pendulum is the distance between the axis at P and the center of gravity of the object. Section 10.4 Practice Problems: 40 Homework: 39, 41, 42 10.5 – Damped Harmonic Motion In simple harmonic motion, an object oscillates with a constant amplitude, because there is no mechanism for dissipating energy. In reality, however, friction or some other energy-dissipating mechanism is always present. In the presence of energy dissipation, the amplitude of oscillation decreases as time passes, and the motion is no longer simple harmonic motion. Instead, it is referred to as damped harmonic motion, the decrease in amplitude being called “damping”. Critical damping is the minimum degree of damping that eliminates any oscillations in the motion as the object returns to its equilibrium position. 10.6 – Driven Harmonic Motion Driven harmonic motion occurs when a driving force acts on an object along with the restoring force. Resonance is the condition under which the driving force can transmit large amounts of energy to an oscillating object, leading to large-amplitude motion. In the absence of damping, resonance occurs when the frequency of the driving force matches a natural frequency at which the object oscillates. Resonance can occur with any object that can oscillate, and springs need not be involved. 10.7 - Elastic Deformation Stretching, Compression, and Young’s Modulus One type of elastic deformation is stretch and compression. The magnitude F of the force required to stretch or compress an object of length 𝐿0 and cross-sectional area A by an amount ∆𝐿 is ∆𝐿 𝐹 = 𝑌( )𝐴 𝐿0 Where Y is a constant called Young’s modulus. (10.17) Another type of elastic deformation is shear. The magnitude F of the shearing force required to create an amount of shear ∆𝑋 for an object of thickness 𝐿0 and cross-sectional area A is ∆𝑋 𝐹 = 𝑆( )𝐴 𝐿0 (10.18) Where S is a constant called the shear modulus. A third type of elastic deformation is volume deformation, which has to do with pressure. Definition of Pressure The pressure P is the magnitude F of the force acting perpendicular to a surface divided by the area A over which the force acts: 𝑃= 𝐹 𝐴 (10.19) SI Unit of Pressure: N/m2, a unit known as a pascal (Pa): 1 Pa =1 N/m2. The change ∆𝑃 in pressure needed to change the volume 𝑉0 of an object by an amount ∆𝑉 is ∆𝑉 −𝐵 ( ) 𝑉0 ∆𝑃 = (10.20) Where B is a constant known as the bulk modulus. Table 10.1 page 197 gives some of the various values for the Young’s Modulus of Solid Materials. Table 10.2 page 198 gives some of the various values for the Shear Modulus of Solid Materials. Table 10.3 page 200 give some of the various values for the Bulk Modulus of Solid and Liquid Materials. 10.8 – Stress, Strain, and Hooke’s Law Stress is the magnitude of the force per unit area applied to an object and causes strain. For stretch/compression, the strain is the fractional change ∆𝐿/𝐿0 in length. For shear, the strain reflects the change in shape of the object and is given by ∆𝑋/𝐿0 . For volume deformation, the strain is the fractional change in volume ∆𝑉/𝑉0 . Hooke’s Law for Stress and Strain Stress is directly proportional to strain. SI Unit of Stress: newton per square meter = pascal (Pa) SI Unit of Strain: Strain is a unit less quantity. In reality objects obey Hooke’s law up to a certain limit. When stress remains proportional to strain the law is obeyed but as soon as the material begins to deviate from the proportionality limit, this is known as the elastic limit of the material. The elastic limit is the point at which once passed the material will not return to its original size and shape after the stress is removed. Table 10.4 Stress and Strain Relations for Elastic Behavior 𝐹 𝐴 =𝑌 ( ∆𝐿 ) 𝐿0 (10.17) 𝐹 𝐴 =𝑆 ∆𝑋 ( ) 𝐿0 (10.18) =𝐵 −∆𝑉 ( ) 𝑉0 (10.19) ∆𝑃 Is proportional to Section 10.7 & 10.8 Practice Problems: 50, 54 Homework: 46-49, 51-53, 55, 56 Stress Strain