Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Optical coherence tomography wikipedia , lookup
Harold Hopkins (physicist) wikipedia , lookup
Gamma spectroscopy wikipedia , lookup
Confocal microscopy wikipedia , lookup
Super-resolution microscopy wikipedia , lookup
Two-dimensional nuclear magnetic resonance spectroscopy wikipedia , lookup
Gaseous detection device wikipedia , lookup
Nonlinear optics wikipedia , lookup
Optical amplifier wikipedia , lookup
3D optical data storage wikipedia , lookup
Optical rogue waves wikipedia , lookup
X-ray fluorescence wikipedia , lookup
Laser pumping wikipedia , lookup
Photonic laser thruster wikipedia , lookup
C555etukansi.kesken.fm Page 1 Wednesday, November 11, 2015 9:42 AM
C 555
OULU 2015
UNIVERSITY OF OUL U P.O. Box 8000 FI-90014 UNIVERSITY OF OULU FINLA ND
U N I V E R S I TAT I S
O U L U E N S I S
ACTA
A C TA
C 555
ACTA
UN
NIIVVEERRSSIITTAT
ATIISS O
OU
ULLU
UEEN
NSSIISS
U
Lauri Hallman
University Lecturer Santeri Palviainen
Postdoctoral research fellow Sanna Taskila
Professor Olli Vuolteenaho
Lauri Hallman
Professor Esa Hohtola
SINGLE PHOTON
DETECTION BASED DEVICES
AND TECHNIQUES FOR
PULSED TIME-OF-FLIGHT
APPLICATIONS
University Lecturer Veli-Matti Ulvinen
Director Sinikka Eskelinen
Professor Jari Juga
University Lecturer Anu Soikkeli
Professor Olli Vuolteenaho
Publications Editor Kirsti Nurkkala
ISBN 978-952-62-1043-8 (Paperback)
ISBN 978-952-62-1044-5 (PDF)
ISSN 0355-3213 (Print)
ISSN 1796-2226 (Online)
UNIVERSITY OF OULU GRADUATE SCHOOL;
UNIVERSITY OF OULU,
FACULTY OF INFORMATION TECHNOLOGY AND ELECTRICAL ENGINEERING,
DEPARTMENT OF ELECTRICAL ENGINEERING;
INFOTECH OULU
C
TECHNICA
TECHNICA
ACTA UNIVERSITATIS OULUENSIS
C Te c h n i c a 5 5 5
LAURI HALLMAN
SINGLE PHOTON DETECTION
BASED DEVICES AND TECHNIQUES
FOR PULSED TIME-OF-FLIGHT
APPLICATIONS
Academic dissertation to be presented with the assent of
the Doctoral Training Committee of Technology and
Natural Sciences of the University of Oulu for public
defence in the OP auditorium (L10), Linnanmaa, on 18
December 2015, at 12 noon
U N I VE R S I T Y O F O U L U , O U L U 2 0 1 5
Copyright © 2015
Acta Univ. Oul. C 555, 2015
Supervised by
Academy Professor Juha Kostamovaara
Reviewed by
Professor Horst Zimmermann
Professor Ari Paasio
Opponent
Docent Markku Åberg
ISBN 978-952-62-1043-8 (Paperback)
ISBN 978-952-62-1044-5 (PDF)
ISSN 0355-3213 (Printed)
ISSN 1796-2226 (Online)
Cover Design
Raimo Ahonen
JUVENES PRINT
TAMPERE 2015
Hallman, Lauri, Single photon detection based devices and techniques for pulsed
time-of-flight applications.
University of Oulu Graduate School; University of Oulu, Faculty of Information Technology
and Electrical Engineering, Department of Electrical Engineering; Infotech Oulu
Acta Univ. Oul. C 555, 2015
University of Oulu, P.O. Box 8000, FI-90014 University of Oulu, Finland
Abstract
In this thesis, a new type of laser diode transmitter using enhanced gain-switching suitable for use
with a single photon avalanche diode (SPAD) detector was developed and tested in the pulsed
time-of-flight laser range finding (lidar) application.
Several laser diode versions were tested and the driving electronics were developed. The
driving electronics improvements enabled a pulsing frequency of up to 1 MHz, while the
maximum laser output power was about 5–40 W depending on the laser diode dimensions. The
large output power is advantageous especially in conditions of strong photon noise emerging from
ambient light outdoors. The length of the laser pulse matches the jitter of a typical SPAD detector
providing several advantages. The new laser pulser structure enables a compact rangefinder for
50 m distance measurement outdoors in sunny conditions with sub-centimeter precision (σ-value)
at a valid distance measurement rate of more than 10 kHz, for example.
Single photon range finding techniques were also shown to enable a char bed level
measurement of a recovery boiler containing highly attenuating and dispersing flue gas. In
addition, gated single photon detector techniques were shown to provide a rejection of fluorescent
photons in a Raman spectroscope leading to a greatly improved signal-to-noise ratio.
Photonic effects were also studied in the case of a pulsed time-of-flight laser rangefinder
utilizing a linear photodetector. It was shown that signal photon noise has an effect on the optimum
detector configuration, and that pulse detection jitter can be minimized with an appropriate timing
discriminator.
Keywords: 3D imaging, laser pulser, pulsed time-of-flight, Raman spectroscopy, range
finding, recovery boiler char bed, SPAD, timing discrimination
Hallman, Lauri, Yksittäisten fotonien ilmaisuun perustuvia tekniikoita ja laitteita
pulssinkulkuaikamittaussovelluksiin.
Oulun yliopiston tutkijakoulu; Oulun yliopisto, Tieto- ja sähkötekniikan tiedekunta,
Sähkötekniikan osasto; Infotech Oulu
Acta Univ. Oul. C 555, 2015
Oulun yliopisto, PL 8000, 90014 Oulun yliopisto
Tiivistelmä
Tässä työssä kehitettiin uudentyyppinen, tehostettua "gain-switchingiä" hyödyntävä laserdiodilähetin käytettäväksi yksittäisten fotonien avalanche-ilmaisimien (SPAD) kanssa, ja sitä testattiin
pulssin lentoaikaan perustuvassa laseretäisyysmittaussovelluksessa.
Useita laserdiodiversioita testattiin ja ohjauselektroniikkaa kehitettiin. Ohjauselektroniikan
parannukset mahdollistivat jopa 1 MHz pulssitustaajuuden, kun taas laserin maksimiteho oli
noin 5–40 W riippuen laserdiodin dimensioista. Suuri lähtöteho on edullinen varsinkin vahvoissa taustafotoniolosuhteissa ulkona. Laserpulssin pituus vastaa tyypillisen SPAD-ilmaisimen jitteriä tarjoten useita etuja. Uusi laserpulssitinrakenne mahdollistaa esimerkiksi kompaktin etäisyysmittarin 50 m mittausetäisyydelle ulkona aurinkoisessa olosuhteessa mm–cm -mittaustarkkuudella (σ-arvo) yli 10 kHz mittaustahdilla.
Yksittäisten fotonien lentoaikamittaustekniikan osoitettiin myös mahdollistavan soodakattilan keon korkeuden mittauksen, jossa on voimakkaasti vaimentavaa ja dispersoivaa savukaasua.
Lisäksi portitetun yksittäisten fotonien ilmaisutekniikan osoitettiin hylkäävän fluoresenssin synnyttämiä fotoneita Raman-spektroskoopissa, joka johtaa selvästi parempaan signaali-kohinasuhteeseen.
Fotoni-ilmiöitä tutkittiin myös lineaarista valoilmaisinta hyödyntävän pulssin kulkuaikamittaukseen perustuvan lasertutkan tapauksessa. Osoitettiin, että signaalin fotonikohina vaikuttaa
optimaaliseen ilmaisinkonfiguraatioon, ja että pulssin ilmaisujitteri voidaan minimoida sopivalla ajoitusdiskriminaattorilla.
Asiasanat: 3D-kuvantaminen, ajoitusdiskriminaatio, etäisyysmittaus, laserpulssitin,
pulssin kulkuaikamittaus, Raman-spektroskopia, soodakattilan keko, SPAD
Acknowledgements
First I would like to thank Professor Juha Kostamovaara for providing me with this
incredible and diverse journey into the world of optoelectronics. Throughout the years
he has given thoughtful comments and has been a truly excellent supervisor. Secondly,
I would like to thank all the current and former lab staff for the nice work atmosphere.
To name a few, thanks to Brigitte Lanz, Jaakko Huikari, Sähba Jahromi and Dr. Ari
Kilpelä for pleasant cooperation, University Lecturer Kari Määttä and Dr. Sergei
Vainshtein for all the advice, and Matti Polojärvi for technical help. Some of the work
was done with people from other institutions. Out of these I would especially like to
thank Hannu Lindström, Martin Kögler and Jussi Tenhunen at VTT for the good
collaboration. Without the expertise and hard work by Dr. Boris Ryvkin from Ioffe
Physico-Technical Institute this project would probably not have been as successful.
This work has been financially supported by the the Academy of Finland, the
Finnish Funding Agency for Technology and Innovation (TEKES), Infotech Oulu and
the Tauno Tönning Foundation, all of which are gratefully acknowledged. Thanks to all
of the reviewers of the publications and the pre-examiners of this thesis: Professor Horst
Zimmermann from Vienna University of Technology and Professor Ari Paasio from the
Technology Research Center of the University of Turku. Gordon Roberts revised the
language of this thesis.
Outside work, thanks to Makke and Masa for various good sports and gaming
sessions in Oulu. On the other hand it is always fun with my friends in Helsinki during
my visits there. Thanks for the hospitality to my sister and brother Anne and Anssi in
Helsinki. Also the uplifting stopovers by Benjamin the dog should be mentioned.
Thanks to my parents Mikko and Marjo-Riitta for support, delicious dinners and
relaxing sauna nights. Last but not least, thanks to Sanna for her cheerful
encouragement.
16.10.2015
Lauri Hallman
7
8
List of terms, symbols and abbreviations
Jitter
Accuracy
Precision
1D
3D
AlAs
APD
CCD
CMOS
COG
ESL
FC/APC
FC/PC
FET
FWHM
GaAs
HP
HR
InGaAs
InP
LD
LR
MEMS
MOSFET
NIR
NTC
OCL
ORC
PCB
PDP
the short-term deviations of the significant instants of a signal from
their ideal positions in time (IEEE 1996)
the degree of correctness with which a measured value agrees with
the true value (IEEE 1996)
the quality of coherence or repeatability of measurement data,
customarily expressed in terms of the standard deviation of the
extended set of measurement results (IEEE 1996)
1-dimensional
3-dimensional
aluminum arsenide
avalanche photodiode
charge-coupled device
complementary metal oxide semiconductor
center of gravity
equivalent series inductance
fiber channel/angled physical contact
fiber channel/physical contact
field-effect transistor
full-width-at-half-maximum
gallium arsenide
high-pass
high-reflectivity
indium gallium arsenide
indium phosphide
laser diode
low-reflectivity
microelectromechanical systems
metal–oxide–semiconductor field-effect transistor
near-infrared
negative temperature coefficient
optical confinement layer
Optoelectronics Research Centre (Tampere, Finland)
printed circuit board
photon detection probability
9
PIN
PMT
pn
PWL
RLC
rms
SMA
SBR
SPAD
TDC
TOF
p-type/intrinsic/n-type
photomultiplier tube
p-type/n-type
piecewise linear
resistor-inductor-capacitor
root mean square
SubMiniature version A
signal-to-background ratio of a single photon counting experiment
(defined here as the ratio of average number of detected signal
counts to the standard deviation of background count bin
populations, with bin widths equal to the signal width Tsignal)
signal-to-noise ratio, defined here as the peak signal amplitude to
rms noise value ratio (when using an analog detector)
single photon avalanche diode
time-to-digital converter
time-of-flight
BG
BW
c
C
Ccharge
d
Epulse
f
flens
F
fraccounts
G
h
i(t)
is(t)
I0
Iamplitude
Ioperation
Ithreshold
k
total noise count rate per second
bandwidth
speed of light
capacitance
capacitor in the current pulsing circuit
thickness of active layer of laser diode
laser pulse energy
pulsing frequency
focal length of the collimating lens
excess noise factor
fraction of laser pulse detections per number of sent laser pulses
gain
Planck constant
photodetector output current
average of the photodetector output current
current coefficient
current pulse amplitude
operating current level
lasing threshold current
instantaneous photoelectron number
SNR
10
L
Lstray
Lstray_Rdamp
Lstray_total
M
n
N
nlaser
nphot
nphotoel
hd
Pav
Prcvd
q
R
Rbias
Rdamp
rdet
RF
Rtot
t
T
T0
tper
Tsignal
tw
v
Vbias
vmax
vnoise_rms
Vth
v(t)
w
x
Z
laser diode chip length
stray inductance in the current pulsing circuit
stray inductance of Rdamp
total stray inductance in the current pulsing circuit
avalanche photodiode internal amplification
refractive index
number of averaged signal counts
number of laser pulses sent
the average number of photons reflecting back from a diffuse target
towards a detector lens
number of photoelectrons
single electron response function
average output power of laser diode
the average power illuminating the photodetector
charge of an electron
intrinsic responsivity of the photodetector at gain M=1
resistor through which Ccharge is charged in the current pulser
resistor in the current pulsing circuit
detector lens radius
feedback resistor
total resistance in the current loop
time
temperature
characteristic temperature of a laser diode
pulsing period
full width of laser pulse
width of current pulse through laser diode
frequency of radiation
drain bias voltage in current pulsing circuit
signal waveform peak voltage
rms voltage noise
detection voltage level
signal waveform
laser diode oxide stripe width
the direction in the laser diode from the wire bonding contact
towards the substrate
target distance
11
α
αi
βi
Γa
ΔV
Δt
ε
λ
σ
σN
τ
τHP
γ(Z)
12
divergence of collimated beam
electron ionization rate
hole ionization rate
optical confinement factor
voltage change over switch S1
time interval between start- and stop-pulse
diffuse reflectivity of the target
central wavelength of the laser
standard deviation of collected count times
measurement precision after averaging N signal counts
efficiency of the optics
high-pass discrimination timing constant
overlap of the input and output beams as a function of distance Z of
the target
List of original publications
This thesis is based on the following publications, which are referred to throughout the
text by their Roman numerals:
I
II
III
IV
V
VI
VII
VIII
Hallman L W & Kostamovaara J (2008) Effect of signal quantum shot noise on the jitter
of leading edge detected and high-pass discriminated laser pulse signals. Measurement
Science and Technology 19(8): 085303.
Hallman L W, Ryvkin B, Haring K, Ranta S, Leinonen T & Kostamovaara J (2010)
Asymmetric waveguide laser diode operated in gain switching mode with high-power
optical pulse generation. Electronics Letters 46(1): 65–66.
Nissinen I, Nissinen J, Länsman A K, Hallman L, Kilpelä A, Kostamovaara J, Kögler
M, Aikio M & Tenhunen J (2011) A sub-ns time-gated CMOS single photon avalanche
diode detector for Raman spectroscopy. Proceedings of the European Solid-State
Device Research Conference (ESSDERC). Helsinki, Finland: 375–378.
Hallman L W, Haring K, Toikkanen L, Leinonen T, Ryvkin B S & Kostamovaara J T
(2012) 3 nJ, 100 ps laser pulses generated with an asymmetric waveguide laser diode
for a single-photon avalanche diode time-of-flight (SPAD TOF) rangefinder
application. Measurement Science and Technology 23(2): 025202.
Hallman L W, Haring K, Toikkanen L, Leinonen T, Ryvkin B S & Kostamovaara J T
(2012) Compact laser pulser for TOF SPAD rangefinder application. Proceedings of
SPIE Photonics West. San Francisco CA.
Hallman L W & Kostamovaara J (2014) Note: Detection jitter of pulsed time-of-flight
lidar with dual pulse triggering. Review of Scientific Instruments 85(3): 036105.
Hallman L W, Huikari J & Kostamovaara J (2014) A high-speed/power laser transmitter
for single photon imaging applications. Proceedings of IEEE Sensors. Valencia, Spain:
1157–1160.
Kostamovaara J, Huikari J, Hallman L, Nissinen I, Nissinen J, Rapakko H, Avrutin E
& Ryvkin B (2015) On laser ranging based on high-speed/energy laser diode pulses and
single-photon detection techniques. IEEE Photonics Journal 7(2): 7800215.
The author of this thesis set up and conducted the measurements for papers I, II and
IV–VI, and participated in the measurements for papers III, VII and VIII. Papers I,
II and IV–VII were written by the author with the help of the co-authors. For paper
III, the main contributions of the author were the characterization of the SPAD
device and the design of the gating circuitry. The new laser diode gain-switching
principle, first tested in paper II, was invented by Dr. Boris Ryvkin, Dr. Eugene
Avrutin and Prof. Juha Kostamovaara. Some previously unpublished new results
are also presented in this thesis.
13
14
Contents
Abstract
Tiivistelmä
Acknowledgements
7 List of terms, symbols and abbreviations
9 List of original publications
13 Contents
15 1 Introduction
17 2 Photonic effects in pulsed time-of-flight range finding
19 2.1 Pulsed TOF range finding using a linear detector ................................... 19 2.2 Pulsed TOF range finding using a single photon detector ...................... 24 2.3 Avalanche multiplication ........................................................................ 28 2.3.1 Single photon avalanche diode ..................................................... 29 2.3.2 Avalanche photodiode .................................................................. 31 3 High speed/power ~100 ps laser pulse transmitter for single
photon TOF measurements
33 3.1 Enhanced laser diode structure to optimize gain-switching
performance for high-power optical pulse generation ............................ 34 3.2 High frequency current pulsing circuit ................................................... 37 3.3 Power waveform measurements ............................................................. 42 3.4 Far-field measurements ........................................................................... 45 3.5 Temperature effects ................................................................................. 46 4 Single photon TOF measurements
51 4.1 SPAD TOF distance measurements......................................................... 51 4.2 Measurement of the char bed level in a recovery boiler ......................... 57 4.3 Raman spectroscopy using gated SPAD detection .................................. 61 5 Effect of signal photon quantum shot noise on linear detection
schemes
63 5.1 Jitter of leading edge triggering receiver................................................. 66 5.2 Jitter of high-pass discriminated signals ................................................. 67 5.3 Jitter of dual-triggering receiver.............................................................. 69 6 Discussion
71 7 Summary
75 References
79 Original publications
85 15
16
1
Introduction
This thesis considers pulsed time-of-flight (TOF) range finding from the viewpoint
of individual photons. On the one hand, noise effects originating from the discrete
photonic nature of light are investigated. On the other hand, TOF measurement
based on the flight time of single photons is tested. For this purpose, work is done
on developing a new type of laser diode especially suitable for single-photon
measurements.
An important application of the TOF technique is range finding, where the
range of a target can be calculated based on the measured flight time of a laser pulse
to and from the target. The amount of photons in an optical pulse sent by a TOF
rangefinder to a target is typically in the range from millions to billions (for
example a commonly used 10 W, 3 ns, 850 nm laser pulse has about 128·109
photons). However, the fraction of photons reflecting back towards a detector lens
can be very small, depending on the target reflectivity and distance. Usually, at
least a signal-to-noise ratio of over 10 is required in this type of measurement to
avoid false detections due to noise (SNR is defined here as the peak signal
amplitude to rms noise value ratio). Therefore the minimum detectable laser pulse
is composed of about ~500 photons with typical detection methods and parameters
(3..5 ns laser pulse, 100 MHz detector channel, 50% quantum efficiency of the
detector, 7 pA / Hz receiver channel input reduced noise and an avalanche diode
internal amplification M=100).
Recently, single photon TOF measurement has become more attractive in
practice due to a discovered method of integrating a single photon avalanche diode
(SPAD) and the detector electronics in standard CMOS technology. The integration
allows inexpensive and compact detector structures for TOF measurements,
including detector matrices. In this thesis, research and development is carried out
on a new type of laser diode tailored for use with this type of detector. The ~100 ps
width of the laser pulse matches with the detection jitter of a typical SPAD, which
leads to benefits in measurement precision. However, the main advantage of the
new laser diode compared to other similar competing laser diodes is the high energy
of the laser pulse (over 1 nJ), providing a considerable benefit for example in
outdoor measurements with high background light levels. Also, the high pulse
energy is advantageous for use with 3D detector matrices because the reflected
pulse energy is spread over the detectors, and therefore less energy is available for
each individual SPAD. The new laser diode structure is introduced in chapter 3.
17
The new laser diode was developed for use with an avalanche transistor current
pulsing circuit made from commercially available components. Although this
circuit provides large >10 A and short ~1.5 ns current pulses, the pulsing frequency
is limited to about 20 kHz due to heating of the avalanche transistor. In this thesis,
it is shown that the use of a carefully chosen MOSFET transistor in the same
topology provides similar or even shorter current pulses at a higher ~0.1–1 MHz
pulsing frequency, leading to faster and more precise measurements with the
developed laser diode. The overall laser pulser size is about one cubic centimeter.
Demonstration distance measurements were performed with the developed
laser diode pulser and SPAD detectors to show the feasibility of a compact device
for fast distance measurements up to several tens of meters in bright sunny
conditions, for example. Distance measurements were also made in a factory
environment. The factory measurements showed the possible feasibility of a 3D
scan in the factory to help optimize process efficiency.
The single photon time-of-flight method is useful also in other applications
besides range finding. A Raman spectroscope utilizing a SPAD matrix was made
utilizing pulsed TOF methods. It was shown that the fluorescence background
typical of Raman spectra can be suppressed by picking out the first few Raman
signal photons with time gating of the SPAD detector. This is an advantage
compared with conventional continuous-time Raman spectroscopy devices. The
results from the first prototype of such a device are presented in chapter 4.3.
The photonic nature of light also plays a role when using a traditional linear
sensor. This thesis was started with the research of the effect of the photonic nature
of light on the jitter of a pulsed time-of-flight lidar using a linear receiver channel.
The photonic nature of light presents a noise component which can be the dominant
noise source in some conditions. The effect of this noise source on the distance
measurement precision was studied, and ways to decrease its effects were found.
18
2
Photonic effects in pulsed time-of-flight
range finding
Practical important information can be deduced from the time-of-flight (TOF) of
particles such as electrons or photons in a variety of applications, like mass
spectrometry to identify chemicals (Wilman et al. 2012), positron emission
tomography and diffuse optical tomography for medical imaging (Braga et al. 2013,
Yudovsky & Pilon 2009), fluorescence-lifetime imaging to provide additional
information regarding biological processes in microscope pictures (Cubeddu et al.
2011, Pacheri et al. 2013) and stimulated emission depletion fluorescence
microscopy to achieve super-resolution imaging (Hell & Wichmann 1994).
The main use of time-of-flight technology in this thesis is pulsed time-of-flight
laser range finding, where the distance to a target is calculated based on the
measured flight time of photons back and forth to a target. The distance can be
scanned in many directions, or measured with a matrix of detectors enabling 3D
imaging. The applications include augmented reality devices, man-machine
interfaces, robotics, scanning of objects for making replicas with a 3D printer,
forest scanning from drones, map creation, autonomous vehicles etc.
Furthermore, a Raman spectroscope was constructed in this thesis, which also
utilizes time-of-flight technology. With this instrument, molecules can be identified
for applications in medicine, agriculture and security. Raman scattering is a weak
phenomenon where the energy of a photon interacting with a molecule is shifted.
The very small fraction of Raman scattered photons are shown to be distinguishable
with time-of-flight technology.
2.1
Pulsed TOF range finding using a linear detector
A lidar (light detection and ranging) device uses the same principle as the classic
radar (radio detection and ranging), where a distance map of targets and obstacles
can be obtained from echoes of sent electromagnetic waves. Shorter wavelength
electromagnetic waves are used in lidar (of the order of ~1 µm) than in classical
radar (~1 cm), enabling better vertical and horizontal resolution since optical laser
beams can be much more easily collimated.
Another difference between radar and lidar is that the discrete photonic
quantum nature of light emerges to be of practical importance at optical
wavelengths. According to insights by Max Planck and Albert Einstein in the early
1900s, a photon can be described as a discrete quantum of energy of magnitude hν
19
which can be gained or lost by the electromagnetic field, where h is the Planck
constant and ν is the frequency of radiation (Isaacson 2007). Because radio
frequencies are about 10000 times lower than frequencies of visible light, the
energy of an optical wavelength photon is about 10000 times larger than the energy
of a radio frequency photon. Due to the high energy of optical photons, optical
detectors respond directly to individual photons, whereas the quantum nature of
radio waves is buried in thermal and other noise, and therefore cannot be measured
with current techniques (Heinzen & Wineland 1990). The rather large energy of
optical photons enables simple single photon detectors, which are also used in this
work.
The classic method to perform radar scanning is to record the full detected echo
waveform and to calculate the distance to the target based on the delay of the echo
and constant speed of the electromagnetic wave (Texas Instruments 2011).
However, unless complex signal processing methods such as interpolation and
deconvolution are used, the measurement resolution is limited by the sampling
period of the detected waveform (Neilsen 2011). For example, at a rate of 1
gigasamples per second, the range estimates would be binned at 15 cm resolution.
This means that if a large measurement distance range and high accuracy are
desired, the memory requirement and computing power requirement set by the
signal processing might rise too high with this approach.
A more robust method that avoids memory and power consumptive transient
waveform analysis is to set a sufficiently high signal threshold to avoid false
triggering from noise, and to determine the target distance from the time instant of
threshold crossing. With this method, the signal threshold needs to be about 10
times the sigma value of noise to avoid false triggering due to noise (Ruotsalainen
et al. 2001). A block diagram of this approach is shown in Fig. 1. As calculated in
the introduction chapter, with typical parameters usually about 500 photogenerated
electrons (photoelectrons) are needed in the receiver per pulse to be able to
distinguish the optical pulse from noise using this method with a linear detector.
20
start-pulse
target
laser diode
start-pulses
photodetector
amplification and
discrimination
counts
time-to-digital
converter (TDC)
minimum signal threshold
Δt=tstop-tstart
stop-pulses
signals from photodetector
Fig. 1. Pulsed time-of-flight distance measurement device block diagram.
The optical echo from the measurement target is composed of individual photons
spread in time with a density envelope corresponding with a convolution of the
laser pulse shape and target response function (Neilsen 2011). That is, the possible
target roughness or dust in the measurement path modifies the density envelope of
photons. The average number of photons nphot reflecting back from a diffuse target
towards a detector lens of radius rdet depends mainly on the energy of the laser pulse
Epulse and target distance Z, and can be calculated with the radar equation (Collis &
Russell 1976, Wang & Kostamovaara 1994)
nphot
2
Epulse rdet
( Z )
hcZ2
(1)
,
where λ is the wavelength of the laser, τ is the efficiency of the optics, ε is the
diffuse reflectivity of the target, γ(Z) is the overlap of the input and output beams,
h is Planck’s constant and c is the speed of light.
Nevertheless, even a constant optical power from most sources does not equal
a constant photon rate. In Mandel (1965), it was shown that the photon number
fluctuation from a single mode laser has a random Poisson distribution. That is, if
the average number of photons arriving within a certain period is nphot, then the
probability to receive exactly k photons within this time interval is
P( nphot_instantaneous k )
k
nphot
e
nphot
k!
.
(2)
This means that the average number nphot of photons reflecting back towards a
detector lens also has a variance equal to nphot (Neville & Kennedy 1964). When a
21
linear photodetector is used, this inherently choppy and random nature of light
means that the signal is noisy itself, even in an otherwise noiseless environment.
Each absorbed photon gives off a free electron in the detector circuit leading to a
current impulse with a shape depending on the frequency response and gain of the
amplifier channel. The resulting variance var{i(t)} of the detector output current
due to the Poissonian distribution of photons (also called signal photon noise or
quantum shot noise) is (Alexander 1997)
var{i (t )} qRF M
t
2
Prcvd ( ) hd' 2 (t )d ,
(3)
where q is the charge of an electron, R is the intrinsic responsivity of the
photodetector at gain M=1 (detector gain explained in chapter 2.3.2), F is the excess
noise factor of the detector (also explained in chapter 2.3.2), Prcvd(ξ) is the average
power illuminating the photodetector and hd' (t ) is the normalized single electron
response of the detector channel that has an area of unity. On the other hand, the
average of the normalized detector output signal waveform is(t) is (Alexander 1997)
t
is (t ) i (t ) RM
Prcvd ( )hd' (t )d .
(4)
Fig. 2 illustrates how signal photon noise forms in a linear analog detector. Example
detector impulse current pulses corresponding with the very weak (~1 nWpeak)
optical pulse of Fig. 2 a), and their sum is shown in Fig. 2 b). A single electron
response function corresponding with a 140 MHz low-pass filter followed by a
400 MHz low-pass filter was used here. Fig. 2 c) shows the average output current
and variance according to (3) and (4).
22
photons / ns impinging photodetector P(t)
8
6
4
2
0
0
1
2
current [pA]
300
a)
4
5
6
t [ns]
7
example total photocurrent
200
six example single electron responses
100
0
3
0
1
2
3
current [pA]
600
4
5
t [ns]
7
i (t )
var{i (t )}
400
6
b)
200
example total photocurrent
0
-200
0
1
2
3
4
c)
5
6
7
t [ns]
Fig. 2. a) An average photon rate impinging a detector with 0.5 A/W responsivity and an
internal amplification of M=1. b) A corresponding example photodetector output current
pulse waveform. c) The average of the output current waveform, the standard deviation
of current fluctuations due to signal photon noise (square root of variance) and the
example current waveform.
A very weak optical and corresponding electrical pulse was shown in Fig. 2 to
illustrate the nature of photonic noise more clearly. Also, the electronics noise is
not shown since it is typically much larger than the above small current pulse
amplitude and variance. In practice, the electronics noise of a pulsed TOF
rangefinder receiver channel is typically about 70 nArms (100 MHz, 7 pA/sqrtHz).
Therefore if a PIN diode is used (internal amplification M=1), the minimum current
pulse amplitude needed for an SNR of 10 is 700 nA, corresponding with an optical
pulse with about 30000 photons / 3 ns. This photon flux corresponds with a signal
noise of about 5 nArms calculated with (3). Therefore when using a PIN diode
23
receiver, the 5 nArms signal shot noise is usually negligible compared to the 70 nArms
input reduced rms noise of the receiver. But when an avalanche photodiode (APD)
receiver is used, the internal amplification of the avalanche transistor (typically
M≈100) amplifies the signal shot noise by M F , where F is the excess noise
factor (explained in chapter 2.3.2, typically F≈3), so correspondingly with an APD,
the signal shot noise is about 60 nArms, whereas the noise of the receiver channel is
almost unchanged in relation to the PIN diode receiver channel case. Therefore
signal shot noise is usually non-negligible when using an APD receiver. The effects
of this noise source on the timing properties of the detected pulse are investigated
in chapter 5.
2.2
Pulsed TOF range finding using a single photon detector
Distance measurement based on the flight time of a single photon has been possible
for a long time using a photomultiplier tube detector (PMT), for example (Poultney
1972). Instead, in this thesis, single photon avalanche diode (SPAD) detectors are
used, which are more compact, and now also available for manufacture with the
inexpensive and versatile CMOS technology.
One of the advantages of SPAD detectors compared to APD detectors is that
typically shorter laser pulses can be used with the SPAD detector. This is because
the timing jitter of a SPAD detector is usually shorter than the single electron
response function of an APD, which correspondingly determine the shortest
sensible laser pulse lengths when using a SPAD or an APD receiver (Becker 2012).
In general, a lidar benefits from the use of a shorter laser pulse – if comparing two
cases with equal laser pulse energy, the use of a shorter laser pulse leads to greater
SNR (Abend 1966).
Typically, laser pulse lengths of about 3 ns have been used in the lidar
application (Kurtti & Kostamovaara 2012, Nissinen et al. 2012). This is due to the
difficulty of creating short and energetic laser pulses. This difficulty stems from
laser driver restrictions, since at the required high current pulse amplitude levels
(>10 A) the current pulse width is very difficult to reduce below a few nanoseconds
due to current pulser inductances and switching speed properties of avalanche
transistors (Duan et al. 2014). Since a standard laser diode output follows the input
current pulse shape, the resulting laser pulse width is also within a few nanoseconds.
Probably due to the aforementioned difficulty of generating short and energetic
laser pulses, one of the leading TOF imager groups have lately made 3D imaging
studies using a SPAD detector and a long ~4 ns laser pulse (Niclass et al. 2013).
24
Shorter laser pulses can be obtained for example by using gain-switching, but
standard gain-switching leads to quite modest optical pulse energy (Ryvkin et al.
2009) and specialized driving current pulse requirements.
The best combination for lidar measurements would be a short, energetic laser
pulse and a sufficiently high resolution receiver. The enhanced gain-switching
principle presented in this thesis together with a single photon detector achieves
this set of goals.
Another advantage of using a single photon detector in the lidar application is
that simpler detection schemes can be used with a SPAD detector compared to a
linear detector. For example, if using a 100 ps laser pulse, detecting any one of the
sent photons leads to centimeter precision (if not considering noise counts) since
light travels one centimeter back and forth to a target in 67 ps. This is a sufficient
distance measurement precision for many applications. In contrast, when using a
linear detector with, for example, a 3 ns laser pulse, a certain timing spot needs to
be picked from the pulse to get sufficient distance measurement accuracy because
a 3 ns period corresponds with about 0.5 m back and forth flight time. This linear
pulse discrimination task is complicated by the very high dynamic range of optical
pulse echo amplitude, as described in chapter 5. As a result, much simpler receiver
structures are possible when using a single photon detector, providing other
advantages as well.
Pulsed time-of-flight range finding using a single photon detector is
pronouncedly statistical in nature. Strictly speaking, a multi-mode laser diode is not
necessarily Poisson distributed due to interaction of laser modes (Mandel 1965),
but in this work the signal and background photons are considered to be Poisson
distributed, as was the case, for example, with Abshire (1978). Therefore the output
counts from a SPAD are a random sequence of pulses with the pulse density
corresponding with the optical echo shape and background light (smeared slightly
by the jitter, diffusion tail and afterpulsing of the SPAD detector as explained in
chapter 2.3.1). An example case of laser pulse detection with a single photon
detector is shown in Fig. 3. Typically, many detection periods do not contain any
counts, other periods contain one or a few counts at most, as shown in Fig. 3 b).
25
power
average echo shape of
laser pulse from target
time
a)
measurement
period
1
2
3
4
counts from
target
dark count / background
induced count
nlaser
b)
histogram
counts
c)
time
histogram
counts
d)
time
Fig. 3. Principle of time-correlated single photon counting. a) Average shape of the laser
pulse reflection, b) an example case of random individual SPAD counts, c) the
histogram after a short measurement time, and d) the histogram after a longer
measurement time.
Due to the statistical nature of SPAD counts, single-shot measurement with a single
photon detector based on just one SPAD count is not reliable since it is difficult or
impossible to tell if a single SPAD count is caused by a valid signal photon or by a
background light or detector noise induced electron-hole pair. However, obtaining
several counts within a short period increases the probability of valid laser pulse
detection. For example Fig. 3 c) shows three counts within a period corresponding
with the laser pulse response width. Usually, the position of the laser pulse is not
known in advance, so the group of three counts could also be noise or background
induced counts. But since the background noise counts are spread out randomly
over time, and signal counts are localized within a short period, the probability of
26
closely grouped counts to be signal photon induced is large typically. Therefore the
false detection rate can be made low if a sufficient number of counts is required
within a narrow time window Tsignal. This can be implemented for example by
collecting a count histogram or alternatively, in the case of 3D measurements (for
example when using a SPAD matrix), this idea can be extended by utilizing signal
counts from neighbouring pixels which measure the distance to nearby directions.
Since neighbouring pixels often collect closely timed signal counts from the same
object surface, the information provided by adjacent pixels can be used to decrease
the false detection rate (Niclass et al. 2013, Zhang et al. 2013, Bao et al. 2014, Shin
et al. 2014).
The signal-to-background (SBR) -ratio of a SPAD distance measurement to
one direction is defined here as the ratio of the average number of detected signal
counts to the standard deviation of background count bin populations, with bin
widths equal to the signal width Tsignal. Each of these background bins collects on
average BG·Tsignal·nlaser background counts, where BG is the total noise count rate
per second and nlaser is the number of laser pulses sent. Therefore
SBR
fraccounts nlaser
,
BG Tsignal nlaser
(5)
where fraccounts is the fraction of laser pulse detections per number nlaser of sent laser
pulses. fraccounts has a linear dependence with the energy of the laser pulse (if
working in true single photon detection mode, explained in the next chapter), and
therefore it has a nearly linear advantage on the SBR according to (5). This speaks
in favor of the laser diode developed in this thesis, which has an especially high
pulse energy compared to non-enhanched laser diodes. An SBR of over ~10 can be
considered reliable, based on Poisson distribution statistics (Neville & Kennedy
1964). Histogram signal processing can also be done to improve the sensitivity and
precision, but this increases the system complexity (Hernandez-Marin et al. 2007,
McCarthy et al. 2013). At least two signal counts are usually required in (5) because
a single SPAD count is often not sufficient for a reliable measurement, unless signal
counts from adjacent measurement pixels are used to validate measurement result.
In such a case, even one signal detection per SPAD might be sufficient for reliable
detection (Shin et al. 2014).
Another practical significance of the Poissonian spread of photons is that most
single-photon detectors give a distorted output signal if more than one photon is
absorbed to take part in the creation of the detection pulse. As can be seen in Fig.
27
4, if on average one photon is absorbed in the detector, then there is almost a 30
percent chance for non-single-photon detection. But when the input to this type of
detector is attenuated to on average less than 0.1 detections / pulse, the probability
for non-single-photon detection becomes negligible. The practical effect of this and
solutions are presented in later chapters.
P(k photoelectrons involved in a single detection)
1
0.8
average photoelectron number = 0.1
0.6
average photoelectron number = 1
0.4
average photoelectron number = 5
0.2
0
0
2
4
6
8
10
instantaneous photoelectron number k
Fig. 4. Distribution of instantaneous photoelectron numbers (how many photons
partake in a photon detection process) for three average values of photoelectron
numbers based on Poisson statistics.
2.3
Avalanche multiplication
The optoelectronic detectors in this research utilize impact ionization, where an
electric field is used to increase the kinetic energy of an electron so high that, upon
a collision with an atom, a new free electron-hole pair is created (Fig. 5). Therefore
an avalanche of free electrons initiated by just one photoelectron can be created
(McIntyre 1999, Johnson 1965). This leads to an amplification of the electric signal
inside the detector. Depending on the chosen electric field strength, a single
photoelectron can be multiplied leading to tens or hundreds of electrons, or more.
In the next chapter, the operation of a single photon avalanche diode (SPAD) is
described, where a single absorbed photon can trigger a macroscopic avalanche
current pulse. Chapter 2.3.2 describes the operation of an avalanche photo diode
(APD), which has a smaller, linear amplification for a continuous stream of
photoelectrons.
28
2.3.1 Single photon avalanche diode
Despite its name, avalanche breakdown is usually a favourable phenomenon, where
the electric field across the depletion region of a pn-junction is raised so high that
a substantial current flow forms from an avalanche of electrons initiated by just one
photogenerated electron. A single photon detector can be created based on this
phenomenon, usually called a single photon avalanche diode (SPAD).
A way to manufacture a SPAD detector in the standard CMOS process was
discovered by Rochas et al. (2001). The problem to solve was to prevent
excessively high electric fields at the edges of the active region due to the strong
doping profile differential there, leading to premature breakdown at the wrong
location. The avalanche breakdown should happen uniformly over the active area
and not only at the edges. Earlier others, using dedicated manufacturing processes,
have usually solved this problem by placing a guard ring around the active area
(Haitz 1965). In the conventional CMOS process, layers were not available for
directly creating such a guard ring. Rochas et al. (2001) solved this using two ntub layers separated by a small gap. Due to lateral diffusion between these n-tubs
an efficient n+ guard-ring forms between the n-tubs, which can be made to encircle
the SPAD without any additional costly manufacturing steps in the CMOS process.
Since then, other, more direct ways to create the guard ring have been found
(Rochas et al. 2003, Gersbach et al. 2008). One such structure, using a p-well guard
ring, was used in papers III, VII and VIII and is shown in Fig. 5.
29
collision
with atom
+
new electronhole pair
photon-induced electron
p-well
n+
anode
photon
p+
RPTU
p-well
B
cathode
n+
0.2 µm
1.55 µm
6.5 µm
deep n-well
p-substrate
Fig. 5. Cross section of a typical SPAD structure implemented in a high-voltage CMOS
technology with a p-well guard ring, with the high field pn-junction multiplication region
approximately marked with red color, and one of many impact ionizations depicted.
The fact that such a single photon detector can be manufactured in CMOS
technology is beneficial because CMOS is an inexpensive, scaling and high-quality
technology leading to well performing, customizable SPADs, with even a
possibility for detector matrices. Due to the macroscopic avalanche current formed
in a SPAD, additional amplifiers are not needed after this detector, which simplifies
the overall detector structure compared to linear analog photodetectors. But due to
the self-sustaining avalanche current formed at each detection, a current quenching
circuit is needed to enable detection of successive photons. This current quenching
circuit can fortunately also be integrated in CMOS technology (Zappa et al. 2002).
Also any following signal processing circuits can be integrated in CMOS, leading
to an overall cost-effective, small and high-performance optoelectronic receiver.
The noise of a SPAD detector is quantified by the so-called dark count rate, i.e.
non-photon induced noise count rate, which is typically less than 10 Hz / µm2 in
regular CMOS technology (Pancheri & Stoppa 2007). This dark count rate mainly
originates from fabrication defects and is often negligible especially compared to
solar background light induced counts, as will be shown later. Smaller dark count
rates are available in special manufacturing technologies (Hsu et al. 2009, Bronzi
et al. 2012).
30
Another imperfection of a practical SPAD leading from fabrication defects is
afterpulsing, where a small part of the avalanche pulse charge gets trapped in
impurities and defects of the semiconductor, and gets released after some time. This
electron trapping and the resulting afterpulsing is a minor harmful effect in the
range finding application.
The main downside of this type of detector is the low photon detection
probability (PDP) due to the planar fabrication process with junctions relatively
close to the surface. Therefore long wavelength light will mainly get absorbed after
the effective high-field multiplication region. The typical PDP for the
GaAs/GaAlAs laser created in this thesis is about 3–8% depending on the
wavelength (the laser emission wavelength is either about 860 nm or 810 nm
depending on whether a bulk or quantum well laser diode is used) (Pancheri &
Stoppa 2007, Guerrieri et al. 2010).
The incidence time of individual photons can be determined very precisely
with a SPAD. The statistical fluctuation (jitter) of time between photon incidence
and the output detection pulse due to transit time spread is typically of the order of
100 ps with a CMOS SPAD (Pancheri & Stoppa 2007), thanks to the strong electric
field in the shallow depletion region. A minor non-ideality regarding the pulse
timing is that if a photon gets absorbed close to, but outside the depletion region,
the induced free electron has a certain probability to drift into the depletion region
to cause an avalanche slightly later than if it were absorbed directly in the depletion
region. This gives a somewhat harmful exponential diffusion tail in the detection
histogram, as seen later in the measurement results of chapter 4.
The reverse bias voltage needed to achieve single photon detection is small in
the planar CMOS process, typically in the region of 20 to 40 V. The lowest reverse
bias voltage at which a self-sustaining avalanche current is accomplished is called
the breakdown voltage. For time-gating purposes, the reverse bias voltage can be
biased above the breakdown voltage for a short period (i.e. gated operation) for
picking out the signal, as explained later.
2.3.2 Avalanche photodiode
The avalanche photodiode (APD) is a detector also based on impact ionization, but
operated below the breakdown voltage, so that the average free electron
amplification is a finite number M. Usually, APDs are manufactured in a special
technology to allow a much deeper absorption region compared to a SPAD in
31
CMOS technology, to maximize photon absorption and minimize the capacitance
of the detector.
The value of amplification M that can be reached depends mainly on the ratio
of the electron ionization rate αi to the hole ionization rate βi inside the APD. The
amplification of individual free electrons is a random process, the variance of which
is also minimized when the ratio of αi to βi is maximized. The variance of
amplification is quantified by the excess noise factor F (McIntyre 1999).
Even after the amplification of electrons by the APD, the flow of electrons is
still usually so small that amplification is needed for accurate detection of the
optical pulse. Usually a transimpedance amplifier offers a good compromise
between low noise and high bandwidth (Alexander 1997).
32
3
High speed/power ~100 ps laser pulse
transmitter for single photon TOF
measurements
The total performance level available from a laser diode transmitter depends on the
laser diode structure and the current pulser driving it. In this study, both of these
parts were developed to achieve a high frequency laser pulser emitting powerful
laser pulses with a width matching the SPAD jitter, providing benefits in the pulsed
TOF range finding / 3D imaging application, as was explained in chapter 2.2.
Table 1 lists publications regarding the development of the new laser pulser and
summarizes advancements in each paper.
Table 1. Publications regarding the new laser pulser and comparative improvements.
Paper
Achievements
II
The first report of ~150 ps, ~5 W single pulse
Notes
IV
~110 ps, ~20 W single pulse, zero-order transverse Current spreading over the laser stripe was
emission from the new laser diode structure.
emission was shown from the laser diode. TOF
improved and the current pulse was
distance measurements were demonstrated with
shortened.
the developed laser diode and a SPAD detector.
V
VII
~100 ps, ~40 W single pulse emission was shown, Laser diode samples had high variance of
and another SPAD TOF distance measurement
performance, a “good sample” was found
demonstration was done.
here.
>10 x higher pulsing rate was achieved with a FET A quantum well version of the laser diode
pulser. Outdoor distance measurements were
showed better tolerance to temperature
demonstrated. The laser diode samples had more
variation compared to bulk laser diodes due
consistent performance due to a commercial
to a higher Ioperation / Ithreshold ratio.
manufacturer. An in-lab designed CMOS SPAD
detector was used.
VIII
The same laser pulser as in paper VII
The paper focused mainly on discussion of
range finding with a SPAD detector and the
developed laser pulser.
The new laser diode structure and the current pulser are presented in chapters 3.1
and 3.2, correspondingly. The following subchapters show conjoint measurement
results of the laser diode and current pulser. After these, in chapter 4.1 the laser
transmitter is utilized in demonstration measurements in its target application.
33
3.1
Enhanced laser diode structure to optimize gain-switching
performance for high-power optical pulse generation
Gain-switching is a phenomenon where the laser optical output overshoots for fast
edges of input current. This is due the interplay between output optical power and
carrier density inside the laser cavity according to the the rate equations which
describe the dynamic operation of a laser diode. With a properly chosen current
pulse width and amplitude, this overshoot can be utilized to obtain a short, single
optical output oscillation.
In Ryvkin et al. (2009) a waveguide structure was suggested to significantly
increase the energy of short (~100 ps) optical pulse emission from a gain-switched
laser diode while keeping the current pulse requirements modest. Simulations of
the new laser diode structure predicted the emission of optical pulses with energies
of over an order of magnitude higher than with regular gain-switched laser diodes.
The new laser diode structure was achieved and optimized through an
understanding of the laser diode gain-switching dynamics and simulation of the
suggested structure based on rate equations and a traveling-wave model.
Several ideas were suggested by Ryvkin et al. (2009) to increase the amplitude
of the gain-switching optical peak, the main points being presented here briefly.
The main idea was to aim for an extremely high ratio of d / Γa (> 2.5 µm), where d
is the active layer thickness and Γa is the optical confinement factor. This was
shown to be advantageous from the dynamic point-of-view, since the small
confinement factor leads to stronger decoupling of electrons and photons in the
thick cavity, delaying the optical pulse emission and therefore allowing a greater
carrier build-up in the large active layer for bigger optical pulse emission. The
structure was optimized for ~1.5 ns, >10 A injection current pulses which can easily
be created with a simple avalanche transistor pulsing circuit.
The suggested way of realizing the small optical confinement factor Γa was to
detune the active layer from the optical mode by misaligning the active waveguide
in relation to the optical mode, as in Fig. 6, i.e., by using an asymmetric waveguide
structure. The degree of overlap between the active layer and optical mode is
quantified by the confinement factor Γa (=light intensity within active area / total
light intensity). The active layer can also be composed of several quantum well
active layers, as suggested in Ryvkin et al. (2011), which provides several practical
significant benefits as described later.
34
modal intensity distribution
refractive index n
3.7
0.8
3.6
3.5
0.4
OCL
0.2
p-cladding
n-cladding
0.6
3.4
3.3
3.2
3.1
0.0
-3
-2
-1
0
1
distance x [m]
2
3.0
Fig. 6. A proposed asymmetric waveguide structure and the corresponding modal
intensity distribution (Ryvkin et al. 2009, published by permission of IEEE).
Fig. 7 shows the main versions and phases of development of the laser diode. All
of the versions are based on the gain-switching enhancement principle, briefly
described above. The first main improvement was the achievement of a zero-order
transverse mode due to a small modification of the internal structure of the laser
diode. Several low-reflectivity (LR) and high-reflectivity (HR) coatings were tested.
Next, the internal efficiency of the laser diode was improved, also by small
modifications to the internal structure of the laser diode, which led to smaller
threshold currents.
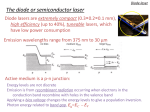
Finally, in papers VII and VIII, a quantum well version of the laser diode was
tested, in addition to bulk laser diode versions. A commercial laser diode fabrication
facility was used to manufacture these laser diodes. The gain-switching
enhancement principle was used in both versions of the laser diode (Ryvkin et al.
2011). The quantum well version of the laser diode provided a lower central
emission wavelength of ~810 nm compared to the ~860 nm central wavelength of
the bulk laser diode, which is advantageous in terms of the PDP of the SPAD
detector. The quantum well laser diode also provides more immunity of pulse
emission to temperature changes due to a lower lasing threshold current, as
explained in chapter 3.5.
The details of the internal developments of the laser diode are beyond the scope
of this thesis, which instead focuses on the development of the transmitter as a
whole and on the applications.
35
Manufactured by Optoelectronics Research Centre (ORC), Tampere:
Laser diode version K2371GSL:
-L=1.4 mm chips, w=120 µm oxide stripe width
-HR 94% / LR 4%
(paper II)
zero‐order
transversal mode
Laser diode version RO633GSL:
-L=1.4 mm chips, w=137 µm oxide stripe width
-HR 96% / LR 7%, as-cleaved, HR 96% / as-cleaved (three variations)
(paper IV & V)
internal efficiency
ηi improvement
Manufactured by Innolume, Dortmund:
-Bulk: L=1.5 mm, w=90 µm; L=3 mm, w=30 µm; L=1.5 mm, w=30 µm (three variations)
-Quantum well: L=1.5 mm, w=30 µm
-HR 99.9% / LR 5%
(paper VII & VIII)
Fig. 7. The main phases of laser diode development.
Fig. 8 shows close-up pictures of an early version of the laser diode. The
characterization measurement results of the laser diode are shown in chapter 3.3
after an introduction of the current pulser circuit used to drive the laser diode.
laser diode
L (1.4 mm
in this case)
x-axis
w
(120 μm in this case)
submount
a)
b)
Fig. 8. a) Close-up picture of laser diode K2371GSL. b) Combined microscope picture
of emitting edge of laser diode and a false color picture of infrared near field laser
emission.
36
3.2
High frequency current pulsing circuit
A short, large amplitude current pulse is the foundation to emitting a short, high
amplitude laser pulse from a laser diode. Simulations based on rate equations show
that current pulses larger than ~5 A with a width of 1 to 1.5 ns (FHWM) are needed
to drive the designed laser diode. Here also compactness and simplicity of the
current pulsing structure were requirements. While the current amplitude needed
can be quite straight-forwardly generated, the short pulse width requirement poses
a challenge, since high speed ON/OFF current switches at the required current pulse
amplitude are not readily available. One typical solution to this is to use the current
pulsing circuit shown in Fig. 9, the basic structure of which was introduced in
Kilpelä & Kostamovaara (1997). This current pulser is able to generate relatively
short and large current pulses, only requiring a switch with a sufficiently fast ONswitching rise time, while the current pulse length is determined by the passive
component values as described in the following. This current pulser, which can be
built with commercial components, was the starting point to the development of
the laser diode described in the previous chapter.
The circuit operates by first charging the voltage over capacitance Ccharge to
Vbias through the schottky diode D1 during switch disconduction. When the switch
S1 is closed, the circuit loop between S1, Ccharge, resistance Rdamp, total loop
inductance Lstray_total and laser diode LD closes. The resulting RLC-circuit can be
made slightly underdamped to produce a large, narrow current pulse with negligible
current oscillations by choosing the value of Rdamp according to
Rdamp
Lstray_total / C charge .
(6)
In this case, the width tw of the forming current pulse through the laser diode
becomes
(7)
t w 2 Lstray_total C charge ,
37
Vbias
Rbias
Ccharge Rdamp
Lstray
D1
S1
LD
Fig. 9. Current pulsing circuit schematic.
and the resulting current pulse amplitude is approximately
I a m p litu d e V
R
tot
L stra y_ tota l / C c h a rg e
,
(8)
where ΔV is the voltage step amplitude and Rtot is the total resistance in the current
loop. If the circuit inductances are carefully minimized, large and narrow ~15 A,
1.5 ns current pulses are available from this current pulser using an FMMT415
avalanche transistor switch. Much larger current pulses are also available from an
avalanche transistor current pulser at longer pulse widths.
Although good performance is available using an avalanche transistor in this
circuit, the residual voltage that forms across a Si avalanche transistor from
collector to emitter when switched on is harmful, as it decreases the overall voltage
change ΔV across the device, limiting the achievable current pulse amplitude. The
residual voltage also increases the power consumption of the avalanche transistor,
leading to heating and therefore limiting the pulsing frequency to about 20 kHz.
The residual voltage is mostly a consequence of the limited difference between
electron and hole velocities in the quasi-neutral region, as analyzed in Vainshtein
et al. (2003). The achievable current pulse shortness has also been shown to depend
on the geometry of the semiconductor avalanche transistor chip (Duan et al. 2014).
High-voltage GaAs junction bipolar transistors with a higher difference between
electron and hole velocities, and therefore lower residual voltage, have been
suggested by Vainshtein et al. (2004) for short and large current pulse generation,
but are not commercially available.
A faster laser pulsing rate would enable faster distance measurements, and
better measurement precision, due to a higher SPAD signal averaging rate. To
enable faster pulsing rates, the plan presented in paper IV was to relax the current
pulsing requirements by reducing the width of the emitting laser diode stripe, since
the current pulse amplitude requirement scales down in proportion to the laser
38
diode stripe width. With this relaxed current pulse requirement, an even simpler
FET current pulsing electronics structure was predicted to be feasible for use with
the laser diode. Since FET transistors do not have a significant residual voltage, a
faster pulsing frequency can be achieved. In practice, with careful FET transistor
selection, a current pulse amplitude of ~12 A with a width of 1.5 nsFWHM at a pulsing
rate of ~100 kHz, and a current pulse amplitude of ~5 A with a width of
~1.1 nsFWHM at a pulsing rate of ~1 MHz were achieved.
In selection of the FET transistor, the most important factor was to find a
transistor working at the edge of its performance level in as many aspects as
possible. Aiming at about 1.5 ns current pulse width (because the laser diode was
designed for this current pulse width), the search for a suitable FET transistor
converged on the Fairchild FDMC86244 with a maximum allowed current pulse
amplitude of ~12 A. This current pulse amplitude was achieved at the FET’s
maximum allowed drain voltage of 150 V, with a Ccharge value of 95 pF and Rdamp
value of 5 Ω. This current amplitude – drain voltage pair also matches according to
(8). Not matching these values would mean the transistor is overspecified in one
way leading to subpar performance. Other important criteria for the FET transistor
were to have a sufficiently high saturation current, a low drain to source onresistance and a clearly shorter turn-on time than the current pulse rise time, which
is approximately equal to (7).
The gate capacitance of large current FET transistors tends to be high, in the
range of hundreds of picofarads. To drive the gate, an Intersil EL7158 high current
gate driver was chosen.
Fig. 10 shows the resulting measured current amplitudes and widths with two
values of Ccharge as a function of Vbias using the chosen FET. With a smaller capacitor
value of 47 pF narrower, but smaller current pulses were achieved, as equations (7)
and (8) predict. Fig. 10 also shows for comparison current pulses achieved using
an avalanche transistor and a Ccharge value of 82 pF from paper V. Large and narrow
current pulses are available using an avalanche transistor, but at a smaller frequency
of about 20 kHz, limited by the heat dissipation mainly due to the high residual
voltage from collector to emitter during conduction. The FET pulsers achieve
relatively narrow and high current pulse amplitudes at small bias voltages, and high
pulsing frequency due to much smaller residual voltages. Also the current pulse
width stays more constant as a function of Vbias with a FET transistor due to the
smaller residual voltage (due to its Vbias-dependence). All of the current pulse values
in Fig. 10 are deduced from the measured voltages over Rdamp, taking the stray
inductance of resistor Rdamp into account, as described in the following chapter. The
39
maximum pulsing frequencies at which the laser pulser starts to heat up
significantly are also shown. In the FET pulser case, somewhat faster pulsing rates
are possible if the laser diode temperature requirements (discussed later) are not
dissatisfied. The layout of the current pulser PCB also has an effect on how much
the current pulser heats the laser diode (an example thermal image is shown in Fig.
12 b)).
Current pulse peak amplitude [A]
20
Avalanche transistor pulser, Ccharge=82 pF,
Vbias=309 V
max f ≈ 20 kHz (paper V)
18
16
FET pulser, Ccharge=95 pF
(paper VII)
14
Vbias=150 V,
max f ≈ 100 kHz
12
FET pulser, Ccharge=47 pF,
(paper VII)
10
Vbias=240 V
Vbias=150 V,
8
max f ≈ 100 kHz
6
4
Vbias=75 V,
Vbias=90 V, max f ≈ 1 MHz
1
1.2
max f ≈ 1 MHz
1.4
1.6
1.8
FWHM current pulse width [ns]
Fig. 10. Measured achieved current pulse widths and amplitudes as a function of Vbias.
The pulsing frequencies at which the current pulser starts to heat up without active
cooling (<10 °C heating of laser diode) are shown in the figure.
The current pulse shape through the laser diode was deduced from the measured
voltage over Rdamp with the principle shown in Fig. 11. The voltage was measured
with a 6 GHz, 500 Ω input resistance Lecroy PP066 passive probe. Due to the stray
equivalent series inductance (ESL) of Rdamp, the current waveform through Rdamp is
not linearly proportional with the voltage over Rdamp. The current waveform was
found by a simulation procedure where the current waveform was iteratively
changed until the simulated voltage response of the current pulse to a resistor and
ESL matched with the measured voltage response. The surface mount 0603 resistor
40
Rdamp was found by measurements to have a stray equivalent inductance of about
0.75 nH (in some cases 0402 resistors were used). Due to this stray inductance of
Rdamp, the current waveform lags the voltage waveform by an interval
approximately equal to the Lstray_Rdamp/Rdamp-time constant, where Lstray_Rdamp is the
ESL of Rdamp.
10
measured voltage over 3.6 Ω
& ~0.75 nH divided by 3.6
iterated PWL
current source
[A]
Rdamp
3.6 Ω
8
simulated voltage response to
the iteratively acquired current
pulse divided by 3.6
Lstray_Rdamp
0.75 nH
6
4
2
0
12
13
14
15
16
17
18
19
20
21
22
time [ns]
Fig. 11. The simulation setup to acquire the current pulse shape from the measured
voltage over the resistor Rdamp with stray inductance Lstray_Rdamp. The measurement was
done with a Vbias value of 290 V, a Ccharge value of 68 pF and an FMMT415 transistor.
Fig. 12 shows a photograph of the FET current pulser and a thermal image of the
pulser taken with a Trotec EC 060 V infrared camera at room temperature. Without
the SMA connectors, the pulser fits into a ~1 cm3 package. To achieve high laser
pulsing rates, the laser diode should be able to withstand the heating due to the FET
transistor (which depends on the pulsing frequency, see Fig. 10) and other
components, as well as ambient temperature changes. These are discussed in
chapter 3.5.
41
Rbias 80 ˚C
(needs to be
distributed)
MOSFET
laser
diode
gate
driver
gate driver 37 ˚C
MOSFET 54 ˚C
laser diode 43 ˚C
b)
a)
Fig. 12. a) Photograph of FET laser pulser (coin for scale). b) Thermal image of the
pulser after pulsing 8 A, 1.5 nsFWHM pulses at 1 MHz for a period of 10 s (poster of paper
VII, published by permission of IEEE).
3.3
Power waveform measurements
The laser output was measured with a New Focus 1434 (25 GHz, 20 µm)
photodetector connected to a 30 GHz Lecroy 830Zi-A oscilloscope. The timing
between the laser and current pulse was aligned based on measured delays from the
laser output to the oscilloscope input. Also the delay from the current measuring
probe tip to the oscilloscope input, and the delay between voltage and current
waveforms due to the ESL of Rdamp shown in Fig. 11 were taken into account. Optics
with a magnification of unity were used, so the ~100 µm laser stripe did not
completely fit into the detector with a diameter of 20 µm, causing some uncertainty
in the power shape measurement due to the non-homogeneity of the emitting stripe,
especially with early laser diode versions. Streak camera measurements enabled the
measurement of the whole laser stripe emission, shown later in this chapter.
The peak powers of the laser pulses were deduced from the average output
powers Pav of the laser diode. Pav was measured with a 1 cm2 calibrated PIN diode
placed close to the laser diode output. Assuming homogeneous output from the
laser diode output stripe, the peak optical power is
Pm ax
v m ax
t p er
Pav t p er ,
(9)
v (t ) d t
0
where v(t) and vmax are the signal waveform and peak amplitude measured by the
photodetector and tper is the pulsing period. Fig. 13 shows the highest amplitude
42
single isolated 4.6 nJ output pulse achieved, and the corresponding driving current
pulse measured with the methods described above. A clean single isolated optical
output pulse is favourable for the TOF measurements, and in this case the unwanted
optical pulse tail amplitude is fairly small at ~1 W. Laser pulse shape dependencies
on the injection current pulse amplitude are shown in papers II, IV, VII and VIII.
45
40
35
optical output pulse [W]
87 psFHWM
30
25
20
injection current pulse [A]
16.1 A, 1.5 nsFHWM
15
10
5
0
0
0.5
1
1.5
2
2.5
3
3.5
4
time [ns]
Fig. 13. Laser diode output power of RO633GSL measured with a New Focus 1434
photodetector at 24 °C from paper V.
The outputs of the laser diodes were also measured with a Hamamatsu C5680 streak
camera equipped with a spectrograph. Fig. 14 shows a streak camera measurement
result corresponding with the measurement shown in Fig. 13. The pulse
measurement was done with a streak camera input slit width of 150 µm, and the
optics before the streak camera input were aligned for -1.2 magnification of laser
diode stripe. Therefore most of the 137 µm laser stripe output fitted into the streak
camera input. Measurements with the streak camera showed slightly lower peak
power and wider pulse width compared to PIN diode measurements. This can be
attributed to small inhomogeneities in the wide laser stripe output and the averaging
of this output power by the streak camera equipped with a monochromator. The
streak camera measurement was done in a room with a slightly smaller temperature
compared to the New Focus 1434 measurement, which also has a small effect on
the shape of the optical pulse.
43
wavelength [nm]
880
output power [W]
35
875
875
30
870
870
25
865
20
860
865
FWHM=100 ps
860
855
15
850
10
850
845
5
845
840
0
1
time [ns]
2
0
0
a)
wavelength [nm]
880
855
1
b)
time [ns]
2
840
FWHM=6.4 nm
0
1
c)
Fig. 14. Streak camera measurement result for the same RO633GSL laser diode sample
with the same injection current pulse input as in Fig. 13 at 23 °C. a) Output from the
streak camera equipped with a spectrograph, with 150 µm monochromator slit width, b)
extracted power as a function of time, and c) extracted line width information from a
separate streak camera measurement with a 50 µm monochromator slit width to avoid
distortion of the monochromator.
Table 2 shows an overview of the best performing laser pulsers achieved in papers
II, IV, VII and VIII, the first of which is the highest peak power laser pulser
achieved. In this case, an avalanche transistor was needed to accommodate the large
~16 A current pulse amplitude requirement due to the wide 137 µm laser stripe.
The maximum pulse repetition frequency was limited to about 20 kHz by the
maximum specified power dissipation of the avalanche transistor of 500 mW.
The next two commercially grown laser diodes shown in Table 2 were
produced with a narrower laser stripe, and small changes to the internal structure
of the laser diode led to a better internal efficiency. Therefore FET current pulsers
could be used due to smaller current pulse amplitude requirements. The use of FET
pulsers enabled higher pulsing frequencies, although the pulsing frequencies were
still limited to about 100 kHz in ~25 °C room temperature due to temperature
sensitivity of the bulk laser diodes and about 10 °C heating of the current pulser at
100 kHz. Out of these two laser diodes, the shorter 1.5 mm laser pulser emits
slightly shorter laser pulses due to a shorter cavity length which can be useful to
increase distance measurement precision.
44
A quantum well version of the laser was shown to be more immune to heat, as
explained in chapter 3.5. 1 MHz, ~140 ps, ~4 W pulsing was achieved with a
quantum well laser in room temperature without active cooling, which was
mentioned in the poster of paper VII and thoroughly reported by Huikari et al.
(2015).
Table 2. Comparison of achieved laser pulsers (measured with New Focus 1434
detector).
Laser diode
stripe
version
width w length L
chip
single
optical
maximum
current pulse amplitude and
pulse
pulse
pulsing
width
energy
FWHM
frequency f
RO633GSL
137 µm 1.4 mm
4 nJ
87 ps
20 kHz
16 A, 1.5 nsFWHM
Bulk commercial
90 µm
1.5 mm
1.5 nJ
79 ps
100 kHz
8.5 A, 1.5 nsFWHM
Bulk commercial
30 µm
3 mm
1.2 nJ
125 ps
100 kHz
7 A, 1.1 nsFWHM
QW commercial
30 µm
3 mm
0.5 nJ
140 ps
1 MHz
6 A, 1 nsFWHM
Another factor that speaks in favor of the narrow (small w) laser diodes is that a
narrow laser has smaller divergence of collimated beam α (O’shea 1985)
w
[rad],
f lens
(10)
where flens is the focal length of the used collimating lens. When the laser beam is
collimated with small divergence, the background photon count rate can also be
minimized, since a smaller divergence of the detector beam is also required to
encompass the transmitter beam (paper VIII).
3.4
Far-field measurements
A narrow far-field output beam from a laser diode is highly desirable to minimize
the coupling loss to a collimating lens and to enable a smaller collimating lens. In
Ryvkin et al. (2013) numerical simulations showed the effect the thickness of the
active layer on the far-field profile. The far-field profile of RO633GSL was
measured by rotating a 1 cm2 PIN diode 50 cm from the laser diode facet, the results
of which are shown in Fig. 15. Due to the smaller slow axis divergence, the
collimating lens can be cut narrower in this direction to minimize the size of the
optics.
45
far-field profile, a.u.
1
fast axis FWHM ≈ 18°
slow axis FWHM ≈ 2°
0.5
0
-30
-20
-10
0
10
20
30
far-field angle, degrees
Fig. 15. Far-field measurement results for laser diode RO633GSL (paper V, published by
permission of IOP).
3.5
Temperature effects
Simplifying a little, the main idea of using a large d / Γa -ratio is that it leads to a
beneficial delay in lasing, leading to larger accumulation of carriers for larger
optical output pulse energy (Ryvkin et al. 2009). But this also increases the dynamic
threshold current, which is potentially harmful in terms of temperature sensitivity
of the laser. However, ways of decreasing the temperature dependence of the optical
pulse emission were found, and these are described next.
First, to research the temperature dependence of the laser diode, the threshold
current was measured in a Heraus Vötsch VM04/100 temperature-stabilized oven.
The average output power was monitored with a large area PIN diode. Fig. 16 a)
and b) show the average output power measured at different temperatures with two
driving current pulse widths. While both measurements demonstrate high dynamic
threshold currents, note the even higher absolute current threshold for the narrower
injection current pulse due to the lasing dynamics.
46
average power @ 1 kHz [µW]
average power @ 1 kHz [µW]
30 °C
25 °C
20 °C
15 °C
10 °C
5 °C
0 °C
-5 °C
-10 °C
3
2.5
2
1.5
1
2.5
2
1
0.5
0.5
0
5 °C
0 °C
-5 °C
-10 °C
-15 °C
-20 °C
1.5
5
5.5
6
6.5
7
7.5 8 8.5 9 9.5
current pulse amplitude [A]
a)
0
3
3.5
4
4.5
5
5.5
6
6.5
current pulse amplitude [A]
b)
Fig. 16. Average output power of a K2371GSL laser diode (grown at ORC) driven with a)
~1.7 nsFWHM current pulses and with b) ~4.1 nsFWHM current pulses at different
temperatures (different laser diode samples were used in measurements a) and b)).
The threshold current Ithreshold of a double heterostructure laser diode varies
according to (Agrawal & Dutta 1993)
Ithreshold (T ) I0 eT /T0 ,
(11)
where I0 is a constant and T0 is a characteristic temperature of a laser diode that
expresses how sensitive Ithreshold is to the temperature T, where a higher value of T0
means lower sensitivity to temperature. Agrawal & Dutta (1993) state that for
typical AlGaAs lasers T0 lies at values above 120 K. Extracted from the information
in Fig. 16 a) and b), T0 is about 100 K irrespective of the driving current pulse width
for the tested laser diodes.
The more important performance characteristic for this laser diode is how
immune the single pulse emission is to temperature changes. To measure the pulse
shape dependence on temperature, a Peltier element was used to cool and warm the
laser diode while measuring the output with a ~15 GHz photodetector setup and
monitoring the laser diode temperature with a negative temperature coefficient
resistor (NTC) placed next to the laser diode submount. The result in Fig. 17 shows
that for this early laser diode version (an intermediate version between RO633GSL
and the commercially grown lasers, not shown in Fig. 7) the maximum single
isolated pulse emission power is about 2.3 W at a temperature of 22.95 ˚C, and the
peak power falls down to about 0.75 W after heating by only about 4 ˚C if the
47
driving current pulse amplitude is kept the same. The reason for this is that for this
early laser diode version the maximum operating current pulse value for single
pulse emission is only about 1.1 times larger than the threshold current value,
almost as much as the threshold current increase due to the very moderate heating
in Fig. 17.
optical pulse peak power [W]
3.5
3
2.5
2
1.5
3.1 Wpeak,
88 psFWHM
not isolated
optical pulses
single, isolated
optical pulses
2.3 Wpeak,
101 psFWHM
22.95 °C
24.09 °C
27.30 °C
1
0.75 Wpeak, 164 psFWHM
0.5
0
2.95
(Ithreshold grows as a function of temperature)
3
3.05
3.1
3.15
3.2
3.25
3.3
3.35
current pulse amplitude [A]
Fig. 17. Peak power output of a K3058GSL (w=16 µm) laser diode measured at three
temperatures as a function of current pulse amplitude. Three example optical pulse
waveforms are shown. The injection current pulse width is ~1.65 nsFWHM in all cases.
The key to increasing the temperature immunity of single pulse emission is to aim
for a high relative difference between the operating current level and the lasing
threshold current level. In other words, the effect of threshold current change on
the optical pulse emission is smaller if the operating point is further away from the
threshold current level. This relationship is better, for example, with the laser diode
presented in paper V. In this case, an acceptable isolated pulse shape is obtained at
an operating current amplitude almost twice as large as the threshold current value.
Fig. 18 shows its single pulse energy measured as a function of temperature.
Quantum well versions of the laser diode (paper VII, Huikari et al. (2015)) showed
even greater immunity to temperature variations due to significantly lower
48
threshold current values. Furthermore, the ambient temperature dependence of the
output pulse was shown by Huikari et al. (2015) to be largely compensable via Vbias
control in a temperature range of 22 °C to 60 °C leading to a very small change in
output pulse power and shape.
energy per pulse [nJ]
5
4
3
20
25
30
35
40
temperature [˚C]
Fig. 18. Temperature dependence of single pulse emission of RO633GSL with a 16.9 A,
1.5 nsFWHM injection current pulse (trailing pulse amplitude <10% of peak amplitude at
all measured temperatures).
Small laser pulse amplitude variation due to temperature change is not very harmful
in pulsed time-of-flight laser range finding, since the attenuation of sent laser pulses
varies greatly anyway due to varying target distances and different target
reflectivities according to (1). But pulse shape variations might have a certain effect
on the distance measurement accuracy as shown later. But if the pulse width stays
close to 100 ps, the inaccuracy due to pulse shape variations stays within a few
centimeters, which is sufficient in traffic applications, for example.
49
50
4
Single photon TOF measurements
4.1
SPAD TOF distance measurements
The main reason for developing the new laser pulser was to study for possibilities
of simplifying 1D rangefinders and 3D imagers by using SPAD detectors. To work
towards this goal, the feasibility of making 1D distance measurements using the
developed laser pulser and a SPAD detector were demonstrated in papers IV, V, VII
and VIII. Mainly long range (~10–50 m) measurement performance was examined.
The results are shown in papers IV, V, VII and VIII and summarized briefly in this
chapter. The modifications needed to make a 2D or 3D measurement device are
discussed later. Also a measurement was made to find the highest distance
measurement precision available. Previously unpublished results about this
measurement are presented at the end of chapter 4.1.
In all of these papers (IV, V, VII and VIII), the basic measurement setup shown
in Fig. 1 was used with different emitter and detector size combinations, with the
exception that an amplifier is not needed for SPAD detector output signals. In paper
V, the match between the detector (100 µm diameter commercial circular SPAD)
and the laser stripe width (120 µm) was better than in paper IV (40 µm x 40 µm
square SPAD and 120 µm stripe laser), optical losses were smaller, and an
optimized laser pulser was used (40 W, 90 ps in paper V versus 25 W, 100 ps in
paper IV). In paper VII, the optical losses were still smaller, and an in-lab designed
CMOS SPAD detector was used to prove that the detector can be customized to a
matrix setup for 3D measurements etc. Also in paper VII, outdoor measurements
were demonstrated to a distance of 50 m. In Paper VIII, more results were given
regarding this outdoor measurement, and a new gating scheme to reduce SPAD
blocking due to background light was proposed.
The high energy optical pulses from the proposed laser pulser enable a long
measurement range with only a few measurement pulses to a passive target even in
conditions of strong background light. Fig. 19 shows such a measurement result
from paper VII which was made outside on a sunny day at air mass 1.5 conditions
with roughly 70 klux measured illuminance at the target. A non-cooperative black
biplanar target with a low reflectivity of about 4% was used at a distance of 50 m,
i.e., the laser beam was focused halfway between two black planes separated by 5.1
cm, and the 20 µm SPAD was gated on at a time corresponding with a distance of
48.5 m. The laser pulser listed third in Table 2 was used (100 kHz, 1.2 nJ, 125
51
psFWHM), and a 50 nm optical bandpass filter was used before a detector lens with a
radius of 9 mm and a focal length of 2 cm. The input and output beams were focused
to fully overlap at the measurement distance.
In these conditions, a background count rate of 13.7 MHz and a 14 percent
signal detection rate were counted (with an exponential background and signal
count decay after the gate-on time due to SPAD detector blocking, as described
later). According to (5), about 20 laser pulses are needed for a reliable SBR of 10
in this case, corresponding with a valid distance measurement rate of ~5 kHz. With
the quantum well version of the laser diode listed fourth in Table 2, the valid
distance measurement rate could in these conditions be increased to about 34 kHz
according to (5), since the achieved pulse energy is about 60% smaller, but the
pulsing frequency is ten times higher, and the PDP of CMOS SPADs is beneficially
about twice as high at the emission wavelength of the quantum well GaAs/AlAs
laser diode (~810 nm), compared to the ~3% PDP at the ~860 nm wavelength of
the bulk GaAs/AlAs laser diode. Note that a very low reflectivity target was used
in these measurements, so with typical target reflectivities the measurement rate
can be even higher.
Another result that can be concluded from Fig. 19 is that different targets at
different ranges within the field of view of the detector can be distinguished even
with a single SPAD detector element, if the targets are separated by ~5 cm. An even
higher range resolution of nearby targets can be achieved with post-processing of
the waveform at the cost of increased system complexity (Hernandez-Marin et al.
2007, McCarthy et al. 2013). The diffusion tail adds ambiguity to the interpretation
of the average pulse flight time, but fortunately only a minority of counts are
diffusion tail induced in Fig. 19, and with advanced SPAD structures the
exponential tail can be made smaller (Hsu et al. 2009, Bronzi et al. 2012).
52
detection probability / pulse / 61 ps bin
0.1
5 bin difference (61 ps / bin) ~51 mm
0.01
gate on
0.001
12% trigger rate from background ~14% trigger rate
photons before signal
from signal photons
48
48.5
322
324
49
326
49.5
328
330
50
332
50.5
distance [m]
51
334
336
338
340
pulse time-of-flight [ns]
Fig. 19. Distribution of SPAD counts from a biplanar black target at 50 m in 70 klux
background illumination. Measurement time 120 s, pulsing frequency 100 kHz, TDC bin
width 61 ps.
In the case of Fig. 19, a SPAD gate was applied 10 ns before the signal. That is, the
bias voltage of the SPAD was decreased below the breakdown voltage only shortly
before the signal arrival time. The advantage of such a gate is that fewer
background photons have had the chance to block the SPAD operation before the
arrival of signal photons (the SPAD is not operational for an interval called the dead
time after each detection due to the required current quenching). Usually, the target
position is not known in advance, so such a gate cannot be applied before the signal.
However, in paper VIII a gating scheme was suggested to decrease the blocking of
SPAD due to background photons, even if the target position is not known in
advance.
The fraction of time that a SPAD is operational can also be increased using a
multi-element SPAD detector. Dividing the input power between several detector
elements decreases the background count rate per detector and the resulting
blocking of SPAD operation. The resulting decrease of the signal photon rate per
detector is also often beneficial in terms of accuracy, as explained in the following
chapters. Moreover, 3D-measurements are possible with multi-element detectors.
A multi-element detector unfortunately also increases optical losses due to the
53
decreasing fill factor. For example, the fill factor (the fraction of SPAD areas
sensitive to light within the total area of the SPAD matrix) of the 128 x 128 SPAD
imager by Niclass et al. (2008) was only about 5 percent. Later, however, using a
microlens array aligned on top of the SPAD matrix, a concentration factor of over
10 was achieved for the same SPAD imager matrix by Pavia et al. (2014). Niclass
et al. (2013) achieved a fill factor of 70% for a 64 x 6 SPAD matrix without
microlenses.
The background light illuminance is typically much smaller indoors: about 200
lux versus 70 klux in the above case. According to (5) this improves the SBR by
more than an order of magnitude, enabling much faster and more precise lidar
measurements indoors.
One of the advantages of using a SPAD detector in distance measurements is
the high, in theory perfect, accuracy of the measurements, as long as each detection
is caused by an individual photon. In practice, to achieve this condition, the average
photoelectron number per SPAD should be less than 0.1 per laser pulse according
to Poisson statistics, as was depicted by Fig. 4. The “walk-error”, i.e. the timing
shift for non-single-photoelectron signals was measured in paper IV. The result in
Fig. 20 shows that the measurement is indeed walk-error free at average
photoelectron numbers smaller than about 0.1, and a distance measurement
inaccuracy (i.e. walk-error) of about 5 cm is obtained if the average photoelectron
number per SPAD is 100. Splitting the sensitive detector area into a SPAD matrix
guarantees walk-error free detection for larger reflection amplitudes. The detector
matrix could even have various detector sizes, the smallest of which would be more
inclined to operate in true single photoelectron detection mode to give accurate
results for highly reflecting targets.
54
center of gravity of count histogram
172 ns
171.9 ns
171.8 ns
171.7 ns
171.6 ns
10
-2
10
0
10
2
10
4
average number of photoelectrons in SPAD per laser pulse
Fig. 20. Measured walk-error of a SPAD as a function of photon number (paper IV,
published by permission of IOP).
The distance measurement precision on the other hand increases as a function of
the number of measurement results. The optimum detection scheme for a single
photon detector in terms of precision was studied by Bar-David (1975) and Abshire
(1978) for several pulse shapes. If the diffusion tail and background noise is filtered
out by thresholding, the signal count histogram is close to Gaussian shape. In this
case, according to the maximum likelihood method, a simple center of gravity
(COG) of timing marks (i.e. average) was found to be the optimum timing estimate
by Bar-David (1975) and Abshire (1978). In this case, the measurement precision
σN increases as a function of the averaged signal counts N (Neville & Kennedy 1964)
N
N
,
(12)
where σ is the standard deviation of the collected count times. σ depends on the
laser pulse shape and SPAD jitter.
The practical extent of distance measurement precision improvement was
tested by averaging a large number of measurement signals. In the test setup, a
motorized target was used in a dark room, where the target moved back and forth
2 mm between every 1000 gated SPAD counts. The start signal to the TDC was
taken from the optical signal with an optical fiber splitter connected to a fast
photodetector utilizing constant fraction timing detection. Fig. 21 a) reveals a drift
problem of distance measurement results due to temperature variations in the room.
55
An early laser diode version was used here, the shape of which had a strong
temperature dependence. Also a low 1 kHz pulsing rate was used, and therefore the
room temperature varied by a few degrees Celsius during this measurement, which
was performed over 22 hours. The measurement results however, show that
micrometer precision can be obtained especially if the pulsing frequency is
increased and the laser pulse shape can be made less temperature dependent, both
of which were achieved in the results of chapter 3.
time interval measurement result with a SPAD detector [ns]
10.72
COG of thresholded 103 histogram population
COG of thresholded 104 histogram population
COG of thresholded 105 histogram population
10.71
10.7
10.69
10.68
10.67
10.66
0
106
2·106
3·106
a)
4·106
5·106
6·106
7·106
total number N of SPAD signal counts collected
measurement result difference from actual distance of 2.0 mm [mm]
1
σ
N
standard deviation of measurement results
0.5
0
-0.5
individual measurement
results
-1
103
104
b)
105
number N of SPAD signal counts collected
Fig. 21. a) TOF measurement results from a target alternating between positions ~2 m ±
1 mm. A histogram of 1000 signal counts was collected alternatingly at each distance,
and centers of gravities were calculated for thresholded histograms (threshold at 4% of
histogram population). b) Distance measurement precision as a function of the signal
count number.
56
4.2
Measurement of the char bed level in a recovery boiler
A pulsed TOF range finding measurement was also carried out in the recovery
boiler of a wood pulp plant to solve a previously unsolved practical problem. The
recovery boiler is an important part in the conversion of wood to wood pulp. Black
liquor (a waste product from the pulp making process) is burned in the recovery
boiler, leading to the recovery of necessary products for pulp production, and as a
useful by-product electricity is created at a MW-level.
The black liquor is sprayed into the recovery boiler from spraying holes (Fig.
22). The measurement of the level of the resulting char bed at the bottom of the
boiler was the target of this measurement. The measurement was made from one of
the spraying holes which was cleared for making the measurement (photograph in
Fig. 22 b)).
This was a single direction proof-of-concept measurement to check the
feasibility of making TOF measurements using a SPAD detector. The final goal is
to make a real-time multi-point 3D-measurement device for char bed profiling,
which would enable the optimization of the recovery boiler process. Using a linear
detector is not possible in this measurement situation due to the high backscattering
from the flue gas inside the chamber.
laser probe
spraying holes
45˚
6.12 m
char bed
0–1m
a)
b)
Fig. 22. a) Setup for measuring char bed level fluctuations. b) Photograph of the laser
probe head in the measuring position at the spraying hole.
The first version of the measurement setup in 2013 used a 532 nm pulsed laser
which failed to measure the char bed level variations due to high scattering from
57
flue gas particles in the chamber. In the second measurement setup of 2014 (Figs.
22 and 23), a Manlight MLT-PL-R-OEM-0,5-100-1,5 pulsed fiber laser with a
higher wavelength of 1550 nm was used since scattering due to small particles
reduces as a function of laser wavelength. On the detection side, a Princeton
Lightwave PNA-308-1 InGaAs/InP SPAD detector was used. The results of the
successful measurement from 2014 are presented in the following.
Agilent E3631A +12 V
5A
+5 V
fan
heat sink
2x Peltier TEC1-12706
1550 nm Manlight laser
10 m RS232
pulse FGA01FC PINinverter diode, Ø0.12 mm
start-pulse
0.5 ns, 1.5 µJ,
@ 100 kHz
352220 FC/APC collimator
10 m, 105 µm fiber
Becker & Hickl SPC-130
counts
Thorlabs single-mode fixed
optical attenuator, FC/PC
10 m, 105 µm fiber
Δt
single-mode pigtail,
mode field diameter @
1550 nm: 10.4 µm
lens + NIR-filter
(9.5 nm pass-band)
stop-pulse
Agilent E3631A: 15 V
Stanford PS310: 76 V
Melles Griot MG 06 DTC 101 TEC
controller
PNA-308-1 Coax
Fiber Pigtailed
Discrete SPAD in
TO8 with three stage
cooler
Fig. 23. The electronics and optics setup for measurement of the char bed level.
Fig. 24 a) shows one of the obtained distance signals from the char bed as a function
of time. The dip in measurement result during 600–900 s is most likely due an
individual char bed pile momentarily growing in height to the level of the laser
beam. Fig. 24 b) shows the number of obtained signal counts from the target,
compared with the number of signal counts obtained in a clear space with a white
58
target at an equal range. The average flue gas attenuation was measured to be much
higher than this, and the success of the measurement was attributed to a high
variance of flue gas attenuation or ballistic pathways opening up for individual
photons. Fig. 24 c) shows the SBR as a function of time, which depends on the
instantaneous flue gas attenuation and background radiation values.
9
distance measurement result [m] (based on histogram peak position)
measurement break
8.5
8
7.5
1/300
500
1000
1500
2000
2500
3000
3500
4000
a)
time [s]
fraction of signal detections versus measurement without flue gas
500
1000
1500
500
1000
1500
1/200
1/100
30
2000
2500
3000
3500
4000
time [s]
b)
SBR (ratio of signal counts to the variance of background count bins)
20
10
0
2000
c)
2500
3000
3500
4000
time [s]
Fig. 24. a) A successful single direction measurement result of char bed level from
Wednesday 7th May 2014, 9.52 – 10.57 with the recovery boiler operating (char bed level
changing). The results are based on obtained count histograms from 30 s measurement
periods smoothed with a 6-point moving average. b) The fraction of successful distance
measurements as a function of time. c) The SBR of the measured histograms as a
function of time.
59
Fig. 25 shows a typical count histogram obtained with a measurement period of
30 s. The background count rate was high (about 260 kHz typically) due to strong
radiation of the ~1500 ˚C target, even though the signal was strongly attenuated
with the large diameter mismatch between the SPAD input fiber and the receiver
fiber (about 10 µm and 105 µm, correspondingly). In addition, an input optical
attenuator was used, as shown in Fig. 23, to avoid saturation of the detector. If
longer measurement periods were to be used, it would need to be taken into account
that the target position typically changes significantly in periods above ~30 s, as
can be seen from Fig. 24 a).
x 10-5
3.5
detection probability / pulse / 58 ps bin
signal counts
from target
3
2.5
2
1.5
1
0.5
0
0
2
10
4
20
30
6
8
10
distance from probe tip [m]
40
50
60
pulse time-of-flight [ns]
Fig. 25. a) An example count distribution histogram from the measurement of Fig. 24,
for a 30 s measurement period from 2130 s to 2160 s. A six-point moving average was
used to smooth the measurement result.
Out of eight measurement attempts, a clear backscatter signal (SBR > 10) was
detected from the char bed on three occasions, a less clear signal (SBR < 10) was
detected on three occasions, and two measurement attempts had an insufficient
SBR to be able to distinguish a signal. Table 3 shows an overview of the results.
60
Table 3. Overview of char bed level measurement results.
Measurement time
Result
Tuesday 14.55–15.43
no signal
Tuesday 16.00–16.40
no signal
Gas attenuation
Notes
Bad measurement due to probe shaking
too much, no support yet.
Wednesday 9.52–10.57
clear signal from
Wednesday 11.04–12.15
clear signal from
~100
Result in Figs. 24 and 25
~75–150
Clear signal for 30 minutes before
>150
Partly no signal from target due to small
~200
Partly no signal from target due to small
7.75–8.5 m
7.8–8.4 m
Wednesday 12.50–13.13
weak signal from
Wednesday 13.15–14.02
weak signal from
Wednesday 17.23–17.45
weak signal from
spraying hole clogging
8.0–8.3 m
SBR
8.3–8.8 m
SBR
~200
-
-
Receiver attenuation was decreased, gas
8.2–8.4 m
Thursday 10.08–10.23
clear signal from
8.0–8.2 m
4.3
attenuation not calculable due to this
Raman spectroscopy using gated SPAD detection
In the above pulsed time-of-flight experiments in chapter 4.1 and 4.2, the diffuse
optical reflections from targets were assumed to originate mostly from elastic
scattering, and other minor effects were ignored, as is reasonable. However, to be
exact, a small portion of the optical pulse is inelastically scattered, meaning that
the energy of scattered photons sometimes changes during the interaction with the
molecular vibrations, phonons or other excitations in the target system. The shifts
in energy of the photons are dependent on the chemical composition of the target.
Therefore if these shifts, i.e. the Raman spectra can be measured, the chemical
composition of the target can also be identified.
A factor that makes the identification more difficult is that many materials emit
also fluorescent light at different energies than the energies of the input photons.
Typically the fluorescent emission decays exponentially within a period of some
nanoseconds or more after the laser stimulus, whereas the Raman scattered photons
are scattered almost instantly after laser stimulus (Fig. 26). This phenomenon was
utilized first by Martyshkin et al. (2004) by picking the Raman scattered photons
with a time gated CCD camera.
In paper III, the time gating idea was utilized using a gated SPAD detector. In
this first device version, a single mechanically scanned SPAD detector was used to
61
scan the spectrograph output. A commercial pulsed Nd:YAG laser with
thermoelectric cooling (150 nJ pulse energy, 532 nm center wavelength, 0.2 nm
linewidth, ~350 psFWHM pulse width, 100 kHz pulsing rate) was used in these
measurements, and an olive oil sample was used due to its high fluorescence to
demonstrate the excellent fluorescence rejection capability.
Fig. 26. a) The measurement setup for Raman spectrometry. b) Principle of operation
and fluorescence rejection (paper III, published by permission of IEEE).
The measurement results from paper III in Fig. 27 show that even though olive oil
is highly fluorescent, the Raman scattered photons can be detected clearly. In later
versions of the device, a SPAD detector matrix was used and other improvements
to the system were made (Nissinen et al. 2015). A spin-off company, TimeGate
Instruments Oy, is now commercializing the developed time-gated Raman
spectrometer.
Fig. 27. Raman spectrum of an olive oil sample a) without time gating b) with a time gate
of 300 ps (paper III, published by permission of IEEE). The Raman shift values above
are corrected from the erroneous values given in paper III.
62
5
Effect of signal photon quantum shot noise
on linear detection schemes
Instead of using single-photon detectors as in the previous chapter, a more
conventional way to perform pulsed TOF range finding is to use a linear optical
detector, such as an APD detector with a finite value of avalanche multiplication.
The main advantage of linear detection compared to the single-photon technique
used in chapter 4 is the true single-shot sub-centimeter precision and accuracy of
distance measurement possible in a wide dynamic range of optical echo amplitude
even with a comparatively long (~3 ns) and therefore energetic laser pulse (Kurtti
& Kostamovaara 2012, Nissinen et al. 2012). The main downside to linear
detection compared to use of SPAD detectors is the need for a complex linear
amplifier channel for each linear detector.
Whereas the Poisson-distributed nature of photons can be seen concretely in
the SPAD detector case, the signal photon noise is usually hidden under electronics
detection noise when a linear detector is used. But in some cases the signal photon
shot noise can be a significant noise source, also when a linear detector is used. The
subtle effects of this noise source on the pulse timing measurement precision in
linear detection schemes were researched in papers I and and VI.
To research the effect of this noise source on the jitter of a pulsed TOF
rangefinder, the measurement setup shown in Fig. 28 was used. An APD detector
and amplifiers with a typical amount of gain and bandwidth were used. The
oscilloscope settings (20 mV/div) were chosen so that the oscilloscope noise was
insignificant compared to other noise sources. The rms detection jitter at the
detection level Vth can be calculated by dividing the instantaneous total rms noise
voltage by the instantaneous signal derivative (slew rate) (Bertolini 1968).
laser diode
attenuating
plate
20 GHz oscilloscope
trigger channel
beam splitter
New Focus 25 GHz PIN diode
RF ≈ 7 kΩ,
BW ≈ 140 MHz
G = +10 V/V,
BW ≈ 350 MHz
200 MHz oscilloscope
measurement channel
Vth
S2382 APD SA5212A
AD8009
jitter
Fig. 28. Measurement setup for jitter research.
63
Fig. 29 shows a time-domain noise measurement result made using the above
measurement configuration. Two values of APD amplification were used, and the
optical signal attenuation was chosen so that the average detector channel output
signal amplitude was the same in both cases. According to this measurement result,
the signal photon shot noise is more prominent with the higher value of M and
therefore its effects on the jitter can be conveniently researched with this setup.
multiplied (M≈15) photodetector current i(t) [µA]
multiplied (M≈51) photodetector current i(t) [µA]
1.6
1.6
1.2
1.2
0.8
0.8
0.4
0.4
0
0
0
4
8
a)
12
0
16
20
time [ns]
100
100
80
80
60
signal quantum
shot noise
according to (3)
40
20
0
0
4
8
12
c)
Fig. 29. a)
Detection
16
20
time [ns]
voltage
16
20
time [ns]
measured
total noise as
a function of
time
120
measured total noise
as a function of time
12
input referred current noise calculated
based on above measurements [nArms]
140
120
8
b)
input referred current noise calculated
based on above measurements [nArms]
140
4
waveforms
60
signal quantum
shot noise
according to (3)
40
20
0
0
4
8
12
16
(SNR=20)
divided
20
time [ns]
d)
by
the
channel
transimpedance at an APD internal gain of M≈15 and b) M≈51 (one hundred waveforms
shown, measured with a Lecroy 830Zi-A real-time 25 ps sampling period oscilloscope).
c) Solid line: Total input referred current noise as a function of time for the M≈15,
SNR=20 signals, calculated from 1000 waveforms. Dashed lines: signal quantum shot
noise calculated with (3) based on the measured laser pulse shape and an iteratively
obtained channel single electron response function. d) Corresponding calculations for
the M≈51, SNR=20 signals.
64
When using a linear detector, a certain timing moment needs to be picked from the
optical input pulse, because the typical optical pulse length of several nanoseconds
corresponds with tens of centimeters of flight distance. This timing discrimination
task is complicated by the large variation of reflected pulse power towards the
detector according to (1). Pulse discriminators (also called time pick-off circuits)
have been developed for this task of precise and accurate pulse timing for a wide
dynamic range of input pulse amplitudes.
The three researched discrimination schemes are illustrated in Fig. 30. The
simplest timing discrimination method is leading edge detection (paper I), which
in principle works with an infinite dynamic range of input amplitudes but needs
compensation of the timing shift, i.e. walk error due to varying input echo
amplitudes. High-pass discrimination (paper I) on the other hand has no walk error
as long as the pulse does not get distorted in the receiver channel. In practice some
dynamic range extension scheme is often needed in this case (Palojärvi et al. 1999,
Pennala et al. 2000). The third discrimination scheme investigated here is to use
two or more time domain parameters (for example leading and trailing edge
crossing times) for the timing detection (paper VI). This idea has been shown to
work well even when the input signal is clipped, therefore enabling measurements
in a very large dynamic area of input power (Kurtti & Kostamovaara 2011 and
Kurtti & Kostamovaara 2012). The effects of signal photon shot noise on all three
of these discrimination schemes were researched here.
vin
trailing edge crossing times can be used
for compensation of walk error,
or high-pass discrimination can be used
vout(high-pass)
C
Vth=10·vnoise_rms typ.
leading edge detection timing
shift, i.e. walk error
t
R
t
high-accuracy timing point but only
for non-distorted input signals
Fig. 30. Principles of pulse timing discrimination for input pulses with highly varying
amplitude.
In the following chapters, the effects of signal photon noise on the jitter properties
of detected pulses are summarized based on the results given in papers I and VI.
First, in chapter 5.1, the signal level dependence of photon noise is shown to have
65
an effect on the leading edge jitter. In chapter 5.2, the signal photon noise transient
is shown to have an effect on the optimum high-pass discrimination scheme. And
finally in chapter 5.3, the limited bandwidth of the receiver channel is shown to
have an effect on the detection jitter when a dual-triggering timing discriminator is
used.
5.1
Jitter of leading edge triggering receiver
In paper I, the effect of signal shot noise on the leading edge jitter was studied first
by simulating the receiver channel in Matlab. A simulation result of the dependence
of the optimum detection level as a function of signal amplitude is shown in Fig.
31. When electronics noise dominates (for example at small signal levels using a
PIN-diode with no internal amplification), the leading edge pulse jitter is simply
minimal at the level of maximum signal slew rate (in this case ~59 percent level).
On the other hand, when an APD receiver is used, the internal amplification of the
APD usually amplifies the signal photon shot noise to a significant level already at
the minimum SNR of 10. Due to the signal level dependence of signal photon shot
noise, the optimum detection level in terms of jitter is lower than the point of
maximum signal slew rate in this case. Another observation made in paper I
concerning the leading edge jitter was that for a certain input pulse amplitude, an
optimum value of M exists to minimize detection jitter.
60%
optimum detection fraction in terms of jitter
55%
50%
45%
AP-diode
receiver
PIN-diode
receiver
40%
35%
10
1 µA
102
10 µA
103
100 µA
104
1 mA
105
10 mA
106
100 mA
SNR
amplitude of photodetector
output current is(t)
Fig. 31. The simulated optimum detection level for low jitter in the case of a PIN diode
receiver (M=1) and an APD receiver (M=100) for a Gaussian shaped optical pulse with
3.5 ns rise time and a receiver bandwidth of 100 MHz, and an input referred current
noise of 100 nArms.
66
5.2
Jitter of high-pass discriminated signals
Fig. 30 illustrated the principle of high-pass discrimination. The high-pass
discrimination timing constant τHP (=RC) is usually chosen to minimize the jitter at
zero-cross, and to provide sufficient over- and underdrive. In paper I, it was shown
that the optimum τHP also depends on whether signal photon shot noise is prominent.
In practice, this means that the optimum value of τHP depends on whether a PIN
diode or APD receiver is used.
Small SNR≈10 signals were examined in the simulation of Fig. 32 because the
jitter decreases anyway with increasing pulse amplitude. For the used optical pulse
shape and single electron response (same parameters as in Fig. 31), the signal slewrate at the zero-cross can be maximized with a 4 ns high-pass time constant,
regardless of whether a PIN diode or APD receiver is used (Fig. 32 c) and d)). Also
the electronics noise gets filtered more with a smaller high-pass time constant,
regardless of whether a PIN diode or an APD receiver is used, as seen in Fig. 32 e)
and f), and the signal shot noise at the zero-cross is greater with a smaller time
constant due to the noise transfer function in both cases. However, since the signal
shot noise is insignificant with the PIN diode receiver, the optimum τHP is smaller
for the PIN diode (~3 ns) compared to the APD receiver (~5 ns) in this case. This
simulation result was confirmed with measurements in paper I.
67
1 A
photocurrent
is(t)
500 nA
τHP
increased
HP-discriminated signals
0
-500 nA
200
0
10
20
a)
t [ns]
slew-rate at zero-cross [A/s]
500 nA
100
1 ns
10 ns
c)
100 ns
τHP
noise at zero-cross [nArms]
electronics noise
= total noise
-500 nA
200
0
10
20
t [ns]
b)
slew-rate at zero-cross [A/s]
100
1 ns
150
50
0
1 ns
shot noise at zero-cross
10 ns
100 ns
τHP
e)
jitter at zero-cross [psrms]
600
400
1 ns
PIN:
optimum τHP in
terms of jitter
~ 3 ns
10 ns
g)
10 ns
d)
100 ns
τHP
noise at zero-cross [nArms]
total noise
100
50
800
τHP
increased
HP-discriminated signals
0
150
150
100
multiplied
photocurrent
is(t)
1A
electronics
noise
shot noise
at zero-cross
0
1 ns
900
10 ns
100 ns
τHP
f)
jitter at zero-cross [psrms]
800
APD:
optimum τHP in
terms of jitter
~ 5 ns
700
100 ns
τHP
600
1 ns
10 ns
h)
100 ns
τHP
Fig. 32. Output signal is(t) and HP-discriminated signals with various high-pass time
constants for a) a PIN-diode (M=1) and b) an APD receiver (M=100). Slew rate of the HPdiscriminated signals at the zero-cross as a function of τHP for c) a PIN diode and d) an
APD receiver. Noise components at the zero-cross of HP-discriminated signals as a
function of the HP time constant for e) a PIN diode and d) an APD receiver. Jitter at the
zero-cross of HP-discriminated signals as a function of HP time constant for g) a PIN
diode and h) an APD receiver (paper I, published by permission of IOP).
68
5.3
Jitter of dual-triggering receiver
In Kurtti & Kostamovaara (2011) and (2012), it was noticed that the use of a multitriggering receiver improves the detection precision at low SNR. The mechanism
by which the precision improves was researched more closely in paper VI. For
simplicity, a dual-triggering receiver was used, where the average of the leading
and trailing edge was used as a pulse timing estimate.
The jitter was researched by analyzing the waveforms of Fig. 29 a) and b) in
Matlab. First, the jitter on the leading and trailing edge was calculated from the
measured pulses level-by-level (red and blue trace in Fig. 33 a) and b)). The leading
edge jitter is smaller due to a larger edge speed, mainly because of the optical signal
shape. As a side note, the red curves in Fig. 33 a) and b) also confirm the simulation
results of chapter 5.1, according to which the optimum leading edge detection level
is lower when the signal photon noise is prominent.
The jitter of the dual-triggering receiver (average of leading and trailing edge)
was calculated similarly level-by-level. The main result here is that the jitter of the
dual-triggering receiver, plotted with the black curves in Fig. 33 a) and b), is
advantageously smaller than either the leading or trailing edge solely. Furthermore,
even though in the case of a larger M value the total noise is clearly larger according
to Fig. 29, the jitter of the dual-triggering receiver is still about 110 psrms at the ~0.8
µA level with both values of M in Fig. 33 a) and b). In paper VI this was attributed
to a negative correlation of signal photon shot noise induced timing shift on the
leading and trailing edge.
current level relating to the
pulses in Fig. 29 a) [µA]
current level relating to the
pulses in Fig. 29 b) [µA]
1.6
1.6
1.2
1.2
0.8
leading edge jitter
trailing edge jitter
0.4
0
jitter of measured average of leading
and trailing edge
100
140
180
a)
220
260
jitter [psrm s]
0.8
leading edge jitter
trailing edge jitter
0.4
0
jitter of measured average of leading
and trailing edge
100
140
180
b)
220
260
jitter [psrm s]
Fig. 33. Jitter of the pulses in Fig. 29 a) and b) on the leading and trailing edge, and their
average.
69
70
6
Discussion
The main result of this research is the development of a new type of laser diode and
its driver for high energy and short ~100 ps laser pulse emission at fast pulsing rate.
This type of laser pulser is needed for TOF measurement applications such as
rangefinders and 3D imagers, and it is especially suitable for use with a SPAD
detector due to matching between the laser pulse width and the jitter of a typical
SPAD detector. Several TOF studies utilizing a SPAD detector and this laser
transmitter, and other <1 ns laser pulse transmitters, were conducted in this work.
Other research groups have also carried out TOF measurement studies, such as
3D imaging, using a CMOS SPAD detector. An optimum laser pulser for this
application would emit short and energetic laser pulses at high pulsing frequency.
Compactness of the laser pulser is also a requirement in many applications.
Typically a trade-off exists between the laser pulsing performance and compactness
of the device. The forerunners in 3D imaging, Niclass et al. (2005) started their 3D
imager studies using a regular gain-switched laser diode. This achieved pulser
compactness and laser pulse shortness (150 ps), but suffered from a low pulse
energy of 15 pJ (compared to the ~1 nJ pulse energy from the laser pulser presented
in this thesis). Later Niclass et al. (2008) used a more expensive and largedimensioned solid-state laser emitting 80 ps, 24 pJ pulses at 40 MHz, together with
a 128 x 128 SPAD detector matrix achieving sub-centimeter 3D measurement
precision to a maximum measurement distance of about 3.5 m. More recently,
Niclass et al. (2013) used a regular compact semiconductor laser diode pulser
emitting much wider ~4 ns laser pulses, providing significantly larger energy
(~200 nJ) for 340 x 96 pixel 3D scanning up to a distance of 100 m at 10 frames/s.
However, due to the long laser pulse length, more complicated processing of the
results was needed to reach a good enough accuracy. In this case, Niclass et al.
(2013) achieved a sigma value for distance measurement precision of about
2.5–10 cm, which equates to about 15–60 cm peak to peak distance measurement
error variation. This is quite large, but might be sufficient for some applications.
Elsewhere, Massa et al. (2002) and Buller & Wallace (2007) used a passively Qswitched AlGaAs laser diode emitting 10–20 ps pulses with 7–10 pJ energy at
25 MHz pulsing frequency. Even though the laser pulse energy was quite modest
in these cases, narrow ~600 ps and large amplitude current pulses were needed to
drive the laser diode, which necessitated a large laboratory instrument. In a more
recent work, Villa et al. (2014) used a Picoquant LDH-P-FA-765 as a laser pulse
source in their 3D SPAD TOF imager. The 5 nJ, <100 ps laser pulses from this
71
device are quite close in amplitude to those achieved from the laser diode pulser
presented in this thesis, but the Picoquant device is a large and expensive laboratory
device based on a master oscillator fiber amplifier requiring cooling. McCarthy et
al. (2013) did 3D imaging to further ranges of a few kilometers using a modelocked fiber laser with dimensions of 9x12x3.2 cm emitting <100 pJ pulses.
Even comparing to the large, expensive laboratory equipment used by many of
the groups described above, the ~100 ps laser pulser presented in this work offers
rather high ~1 nJ optical pulse energy from a compact ~1 cm3 device. The benefit
of using a more energetic optical pulse in a pulsed TOF SPAD rangefinder or 3D
imager application can be examined from several viewpoints. If true single-photon
sensing is used, a tenfold increase in optical pulse energy leads to approximately
ten times better SBR, which translates to ten times faster distance measurement or
about three times longer measurement range, or three times better ranging precision
in a certain measurement time. On the other hand, the optical pulse can be spread
on a larger number of detectors enabling better vertical and horizontal resolution
for 2D or 3D measurements, or alternatively the higher pulse energy can provide a
faster measurement rate for a fixed vertical and horizontal resolution.
The laser pulsing frequency was also improved in this work. This is mainly an
issue of laser driver design, as the output from the laser diode is the usually the
same for a certain injection current pulse shape, regardless of pulsing frequency (if
the laser diode temperature is the same). A faster laser pulsing frequency directly
translates to a faster valid distance measurement rate, although to avoid distance
measurement ambiguity, only one laser pulse should be in flight at a time (unless
pseudo-random pulsing is used (Hiskett et al. 2008)). For example, the maximum
unambiguous measurement range with the achieved pulsing rate of 1 MHz is about
150 m. This measurement speed improvement gained from higher pulsing
frequency can also be exchanged for better 1D or 3D measurement capability in a
similar manner as described above. But note that a faster pulsing rate does not
directly compensate for small SBR due to a small laser pulse energy, since
increasing the pulsing frequency also increases background photon counts.
According to (5), if all else is equal, the SBR of the measurement improves only
proportionally to the square root of the pulsing frequency. Therefore the high laser
pulse energy achieved can be considered a greater merit than the high pulsing
frequency, although both are useful to achieve fast measurement results.
One important potential application for this laser pulser is 3D imaging for
vehicles. In this application, at least 25 Hz real-time 3D measurement to a distance
of about 50…100 m would be preferred. Deducing from the achieved 1D
72
measurement results summarized in chapter 4.1, a valid 1D distance measurement
rate of over ~8 kHz to a black (~4% reflectivity) target at 100 m can be expected
in sunny conditions with the developed 1 MHz quantum well laser diode pulser and
a SPAD detector. The 1D measurement speed can be traded off for 2D or 3D
measurement capability using a detector matrix or a MEMS scanner. Therefore,
roughly calculating, assuming 50 percent signal losses compared to a 1D
measurement, a 160 pixel 3D measurement with centimeter precision could be
performed in sunny conditions at a measurement rate of 25 Hz up to a distance of
100 m, and a 640 pixel 3D measurement could be carried out similarly up to a
distance of 50 m with this laser pulser. This is quite good considering the ~1 cm3
size of the proposed laser pulser and the very low reflection coefficient of the target
used in these calculations, but in practice better vertical and horizontal resolution
is needed in this application. This could be achieved, for example, by using an array
of laser diodes as is done in Velodyne laser scanners (Schwarz 2010), or with an
even more energetic laser pulse. Recent simulations show that the optical pulse
energy from the designed laser diode can still be increased by using a saturable
absorber implemented with an unpumped laser diode section as was done by Lanz
et al. (2013), except creating the unpumped section already at the molecular beam
epitaxy fabrication stage should work better than using focused ion beam etching.
Another option for increasing the laser pulse energy is to abandon the gainswitching regime and use longer laser pulses, as was done by Niclass et al. (2013).
That is, a more energetic optical pulse is easier to create if a longer optical pulse
length is allowed. However, using a longer laser pulse increases the SBR at the cost
of measurement precision. For example, if using a 4 ns laser pulse in pulsed TOF
SPAD distance measurements, centimeter distance measurement precision would
need averaging of about 1000 signal counts according to (12), whereas only a few
signal counts from a 100 ps laser pulse are sufficient for cm-precision.
Yet another way to improve the performance of 1D–3D scanning while keeping
the short ~100 ps laser pulse for precise distance measurement would be to create
a ~100 ps laser pulser for a higher wavelength using the proposed gain-switching
enhancement principles. This would decrease the solar background radiation falling
on the signal bandwidth due to the spectrum shape of solar radiation. Also quantum
efficiencies can be much higher with NIR InGaAs SPADs (~20–40% at ~1000–
1550 nm wavelength range (Acerbi et al. 2013) compared to ~3–8% with Si CMOS
SPADs at 810–860 nm (Guerrieri et al. 2010). Moreover, higher average powers
can be used at NIR wavelengths in terms of eye safety (Henderson & Schulmeister
73
2004). The downside to this approach is that integration of SPADs and TDCs is not
currently possible in InGaAs processes.
As another suggestion for further work, the laser diode could be
commercialized by packaging the laser diode together with an integrated laser
driver and possible temperature compensation circuit via Vbias manipulation. The
main competition in this size category is regular gain-switched laser diodes
emitting about ~10 times smaller pulse energies than is available with the gainswitching enhancement proposed here.
The Raman and char bed measurements made in this work imply that a wide
array of applications are possible with single photon techniques and devices
(although special fiber lasers were required in these two particular demanding
applications). New applications for the created laser pulser might also emerge due
to the improving resolution and functionality of scaling CMOS SPAD image
sensors.
The presented laser pulser emitting short ~100 ps laser pulses could also be
used in conjunction with a linear TOF receiver channel. The use of <100 ps laser
pulses with a linear pulsed TOF rangefinder receiver channel was suggested already
by Pennala et al. (2000), leading to even millimeter single-shot measurement
precision compared to the centimeter precision obtainable with nanosecond optical
pulses. However, a very high receiver bandwidth with high current consumption is
needed in this case, whereas a low-current consumption SPAD detector inherently
responds well to short ~100 ps optical pulses.
A natural question that arises is whether single photon detectors or linear
detectors are better for use in pulsed TOF range finding and 3D imaging
applications. The main advantage of using a linear receiver instead of a SPAD
receiver is that single-shot distance measurement precision of a few centimeters is
possible even using a long (several nanoseconds) and therefore energetic laser pulse
(for example a single-shot precision of ~20–144 ps was achieved in Kurtti &
Kostamovaara (2011)). The main advantage of SPAD detectors on the other hand
is the much simpler receiver structure as no amplifiers are needed after the SPAD
detectors.
74
7
Summary
The main interest behind this research work was to study for possibilities to utilize
single photon avalanche diode detectors in compact laser distance meters and 3D
imagers for automotive applications, computer interfaces, industry etc. For this
purpose, a high energy laser pulser was needed. The key achievement of this
research was the development of a new small ~1 cm3 laser pulser emitting energetic,
short ~100 ps laser pulses at high pulsing frequency.
The core idea in the new laser pulser is the gain-switching enhancement
principle suggested by Ryvkin et al. (2009), according to which a large ratio
(>>1 µm) of active layer thickness (da) to optical confinement factor (Гa) should be
used to improve gain-switching dynamics for short and energetic laser output pulse
emissions. One suggested way of achieving the low confinement factor is to use an
asymmetric waveguide structure. Measurement results showed that the gainswitching enhancement principle works, and provides high laser pulse energies of
about ~0.5–4 nJ, depending on the laser diode stripe width. Without the proposed
gain-switching enhancement the pulse energies are about an order of magnitude
smaller at the ~100 ps laser pulse width regime.
To drive the laser diodes, initially an avalanche transistor current pulser circuit
was used, which provides large ~15 A and narrow ~1.5 ns current pulses. With these
current pulses, a wide 137 µm laser diode could be driven providing large 4 nJ,
~100 ps optical pulses. However, the pulsing frequency was limited to about
20 kHz because of high power dissipation of the avalanche transistor due to its high
residual voltage.
To fight the pulsing frequency limitation, a modified FET current pulser
structure was created. An about fifty times higher pulsing frequency of ~1 MHz
compared to previously used avalanche transistor current pulsers was achieved at a
decreased current pulse amplitude of ~5 A, but an advantageously narrower current
pulse width of ~1.1 nsFHWM. At a lower 100 kHz pulsing rate, ~12 A, ~1.5 nsFWHM
current pulsing was available from the FET pulser.
One goal of this research was to enable high performance of laser pulsing in a
wide range of ambient temperatures (for automotive applications etc.). The main
conclusion was that the laser diode output can be made less susceptible to ambient
temperature changes by operating the laser diode at a current level as far above the
lasing threshold current as possible. This way, changes in the lasing threshold
current (temperature dependent) have a smaller relative effect on the output pulse
power. Fortunately, the presented gain-switching enhancement principle also works
75
with a quantum well laser structure, which has a lower lasing threshold current than
a bulk laser diode. 1 MHz, ~0.5 nJ, ~100 psFWHM laser pulsing was achieved at
room temperature with a 30 µm wide, 3 mm long quantum well laser diode, and
Huikari et al. (2015) showed that the pulse power halving due to an ambient
temperature change from 22 °C to 60 °C can be almost fully compensated with a
temperature - current pulse amplitude feedback circuit. This might be more
effective with the developed FET pulser compared to an avalanche transistor circuit,
since the current pulse length stays much more constant as a function of current
pulse amplitude with the FET pulser.
The main application for the created compact laser pulser is precise pulsed TOF
range finding and 3D scanning with a SPAD detector. The short ~100 ps laser pulse
inherently leads to centimeter precision distance measurement, even with the
simplest of pulse timing estimates, and the high pulse energy and high pulsing
frequency enable long measurement range and high measurement speed. For
example, in paper VII, a reliable SBR>10 signal enabling centimeter distance
measurement precision was obtained from a black target at 50 m at a frequency of
~5 kHz in sunny 70 klux conditions. With the achieved quantum well laser diode
pulser exhibiting a higher pulsing frequency of 1 MHz, and a more favorable
emission wavelength (~810 nm) in terms of SPAD PDP, a sixfold increase in the
valid distance measurement rate can be expected. The 1D measurement speed can
be exchanged for 3D measurement capability with a SPAD detector matrix or
scanning mechanics.
The effectiveness of single photon measurement techniques was also
demonstrated in a demanding factory environment. A real-time char bed level
measurement was carried out in the recovery boiler of a pulp mill. Linear pulse
detection schemes are not possible in this application due to the high backscattering
and attenuation by the flue gas inside the chamber. Single photon techniques proved
effective, as rarely, but often enough, a ballistic pathway opened up for signal
photons. The char bed level changed within a region of about 1 m as black liquor
was sprayed into the chamber. A single direction measurement of the char bed level
was made at a 1/30 s measurement rate with a precision of a few centimeters. The
results showed that with further system improvements it might be possible to make
a real-time 3D scanner of the char bed surface with single-photon techniques.
As another single photon measurement demonstration, a Raman spectrometer
prototype utilizing a single photon detector was built in this research work. Raman
scattered photons were shown to be distinguishable from fluorescent photons with
a time-gated single photon avalanche diode.
76
Photonic effects were also researched in the case of TOF measurements with a
linear detector. The photonic nature of light leads to an inherent noisiness of the
optical detection waveform. In this research, it was shown that its effects are
different depending on the pulse discriminator type used. In leading edge detection,
the optimum detection level is simply lower than the level of maximum signal slew
rate due to the signal level dependence of signal shot noise. In high-pass
discrimination, a compromise between the signal slew rate and signal shot noise
can be made by choosing an appropriate high-pass time constant.
77
78
References
Abend K (1966) Optimum photon detection (Corresp.). IEEE Transactions on Information
Theory 12(1): 64–65.
Abshire J (1978) A comparative study of optimum and suboptimum direct-detection laser
ranging receivers. Greenbelt MD, National Aeronautics and Space Administration,
Scientific and Technical Information Office.
Acerbi F, Anti M, Tosi A & Zappa F (2013) Design criteria for InGaAs/InP single-photon
avalanche diode. IEEE Photonics Journal 5(2): 6800209.
Agrawal GP & Dutta NK (1993) Semiconductor lasers. New York NY, Van Nostrand
Reinhold.
Alexander SB (1997) Optical communication receiver design. Bellingham WA, SPIE
Optical Engineering Press.
Bao Z, Li Z, Shi Y, Wu E, Wu G & Zeng H (2014) Coincidence photon-counting laser
ranging for moving targets with high signal-to-noise ratio. IEEE Photonics Technology
Letters 26(15) 1495–1498.
Bar-David I (1975) Minimum-mean-square-error estimation of photon pulse delay (corresp.).
IEEE Transactions on Information Theory 21(3): 326–330.
Braga LHC, Gasparini L, Grant L, Henderson RK, Massari N, Perenzoni M, Stoppa D &
Walker R (2013) An 8×16-pixel 92kSPAD time-resolved sensor with on-pixel 64ps 12b
TDC and 100MS/s real-time energy histogramming in 0.13µm CIS technology for
PET/MRI applications. Digest of Technical Papers IEEE International Solid-State
Circuits Conference (ISSCC): 486–487.
Becker W (2012) The bh TCSPC Handbook. Berlin, Becker & Hickl.
Bertolini G (1968) Pulse shape and time resolution. In: Bertolini G & Coche A (eds.)
Semiconductor detectors. Amsterdam, Holland, North-Holland Publishing Co.
Bronzi D, Villa F, Bellisai S, Markovic B, Tisa S, Tosi A, Zappa F, Weyers S, Durini D,
Brockherde W & Paschen U (2012) Low-noise and large-area CMOS SPADs with
timing response free from slow tails. Proceedings of the European Solid-State Device
Research Conference (ESSDERC): 230–233.
Buller G & Wallace A (2007) Ranging and three-dimensional imaging using time-correlated
single-photon counting and point-by-point acquisition. IEEE Journal of Selected Topics
in Quantum Electronics 13(4): 1006–1015.
Collis RTH & Russell PB (1976) Lidar measurement of particles and gases by elastic
backscattering and differential absorption. Chapter in Laser Monitoring of the
Atmosphere 14: 71–151.
Cubeddu R, Bassi A, Comelli D, Cova S, Farina A, Ghioni M, Rech I, Pifferi A, Spinelli L,
Taroni P, Torricelli A, Tosi A, Valentini G & Zappa F (2011) Photonics for life. IEEE
Pulse 2(3): 16–23.
Duan G, Vainshtein SN, Kostamovaara JT, Zemlyakov VE & Egorkin VI (2014) 3-D
properties of the switching transient in a high-speed avalanche transistor require optimal
chip design. IEEE Transactions on Electron Devices 61(3): 716–721.
79
Gersbach M, Niclass C, Charbon E, Richardson J, Henderson R & Grant L (2008) A single
photon detector implemented in a 130nm CMOS imaging process. Proceedings of the
38th European Solid-State Device Research Conference (EESDERC): 270–273.
Guerrieri F, Tisa S, Tosi A & Zappa F (2010) Two-dimensional SPAD imaging camera for
photon counting. IEEE Photonics Journal 2(5): 759–774.
Haitz R H (1965) Mechanisms contributing to the noise pulse rate of avalanche diodes.
Journal of Applied Physics 36(10): 3123–3131.
Heinzen DJ & Wineland DJ (1990) Quantum-limited cooling and detection of radiofrequency oscillations by laser-cooled ions. Physical Review A 42(5): 2977–2994.
Hell SW & Wichmann J (1994) Breaking the diffraction resolution limit by stimulated
emission: stimulated-emission-depletion fluorescence microscopy. Optics Letters
19(11): 780–782.
Henderson R & Schulmeister R (2004) Laser safety. Bristol UK, Institute of Physics
Publishing.
Heinzen DJ & Wineland DJ (1990) Quantum-limited cooling and detection of radiofrequency oscillations by laser-cooled ions. Physical Review A 42(5): 2977–2994.
Hernandez-Marin, S, Wallace AM & Gibson GJ (2007) Bayesian analysis of lidar signals
with multiple returns. IEEE Transactions on Pattern Analysis and Machine Intelligence
29(12): 2170–2180.
Hiskett PA, Parry CS McCarthy A & Buller GS (2008) A photon-counting time-of-flight
ranging technique developed for the avoidance of range ambiguity at gigahertz clock
rates. Optics Express 16(18): 13685–13698.
Hsu, MJ, Esener SC & Finkelstein H (2009) A CMOS STI-bound single-photon avalanche
diode with 27-ps timing resolution and a reduced diffusion tail. IEEE Electron Device
Letters 30(6): 641–643.
Huikari JMT, Avrutin, EA, Ryvkin BS, Nissinen JJ & Kostamovaara JT (2015) High-energy
picosecond pulse generation by gain switching in asymmetric waveguide structure
multiple quantum well lasers. IEEE Journal of Selected Topics in Quantum Electronics
21(6): 1501206.
IEEE (1996) The IEEE standard dictionary of electrical and electronics terms. IEEE
Standard 100-1996. IEEE Standards Office, Piscataway, New Jersey, USA.
Isaacson W (2007) Einstein: his life and universe. New York NY, Simon & Schuster.
Johnson KM (1965) High-speed photodiode signal enhancement at avalanche breakdown
voltage. IEEE Transactions on Electron Devices 12(2): 55–63.
Kasap SO (2013) Optoelectronics and photonics: principles and practices. Boston MA,
Pearson.
Kilpelä A & Kostamovaara J (1997) Laser pulser for a time-of-flight laser radar. Review of
Scientific Instruments 68: 2253–2258.
Kurtti S & Kostamovaara J (2011) An integrated laser radar receiver channel utilizing a
time-domain walk error compensation scheme. IEEE Transactions on Instrumentation
and Measurement 60(1): 146–157.
80
Kurtti S & Kostamovaara J (2012) An integrated receiver channel for a laser scanner. IEEE
International Instrumentation and Measurement Technology Conference (I2MTC).
Graz, Austria: 1358–1361.
Lanz B, Ryvkin BS, Avrutin EA & Kostamovaara JT (2013) Performance improvement by
a saturable absorber in gain-switched asymmetric-waveguide laser diodes. Optics
Express 21(24): 29780–29791.
Mandel L (1965) Phenomenological theory of laser beam fluctuations and beam mixing.
Physical Review 138(3B): 753–762.
Martyshkin DV, Ahuja RC, Kudriavtsev A & Mirov SB (2004) Effective suppression of
fluorescence light in Raman measurements using ultrafast time gated charge coupled
device camera. Review of Scientific Instruments 75(3): 630–635.
Massa J, Buller G, Walker A, Smith G, Cova S, Umasuthan M & Wallace A (2002) Optical
design and evaluation of a three-dimensional imaging and ranging system based on
time-correlated single-photon counting. Applied Optics 41(6): 1063–1070.
McCarthy A, Krichel NJ, Gemmell NR, Ren X, Tanner MG, Dorenbos SN, Zwiller V,
Hadfield RH & Buller GS (2013) Kilometer-range, high resolution depth imaging via
1560 nm wavelength single-photon detection. Optics Express 21(7): 8904–8915.
McIntyre RJ (1999) A new look at impact ionization-Part I: A theory of gain, noise,
breakdown probability, and frequency response. IEEE Transactions on Electron
Devices 46(8): 1623–1631.
Neilsen KD (2011) Signal processing on digitized ladar waveforms for enhanced resolution
on surface edges. MSc thesis, Utah State University, Department of Electrical and
Computer Engineering.
Neville AM & Kennedy JB (1964) Basic statistical methods for engineers and scientists.
London UK, Intertext Books.
Niclass C, Rochas A, Besse P-A & Charbon E (2005) Design and characterization of a
CMOS 3-D image sensor based on single photon avalanche diodes. IEEE Journal of
Solid-State Circuits 40(9): 1847–1854.
Niclass C, Favi C, Kluter T, Gersbach M & Charbon E (2008) A 128 x 128 single-photon
image sensor with column-level 10-bit time-to-digital converter array. IEEE Journal of
Solid-State Circuits 43(12): 2977–2989.
Niclass C, Soga M, Matsubara H, Kato S & Kagami M (2013) A 100-m range 10-frame/s
340 x 96-pixel time-of-flight depth sensor in 0.18-µm CMOS. IEEE Journal of SolidState Circuits 48(2): 559–572.
Nissinen J, Nissinen I & Kostamovaara J (2012) An integrated CMOS receiver-TDC chip
for mm-accurate pulsed time-of-flight laser radar measurements. Proceedings of the
IEEE International Instrumentation and Measurement Technology Conference
(I2MTC): 421–424.
Nissinen I, Nissinen J, Keränen P, Länsman A-K, Holma J & Kostamovaara J (2015) A 2 x
(4) x 128 multitime-gated SPAD line detector for pulsed Raman spectroscopy. IEEE
Sensors Journal 15(3): 1358–1365.
O’Shea DC (1985) Elements of modern optical design. John Wiley & Sons.
81
Palojärvi P, Ruotsalainen T & Kostamovaara J (1999) A new approach to avoid walk error
in pulsed laser rangefinding. Proceedings of the 1999 IEEE International Symposium
on Circuits and Systems (ISCAS) 1: 258–261.
Pancheri L & Stoppa D (2007) Low-noise CMOS single-photon avalanche diodes with 32
ns dead time. Proceedings of the 37th European Solid State Device Research
Conference (EESDERC): 362–365.
Pancheri L, Massari N & Stoppa D (2013) SPAD image sensor with analog counting pixel
for time-resolved fluorescence detection. IEEE Transactions on Electron Devices
60(10): 3442–3449.
Pavia JM, Wolf M & Charbon E (2014) Measurement and modeling of microlenses
fabricated on single-photon avalanche diode arrays for fill factor recovery. Optics
Express 22(4): 4202–4213.
Pennala R, Kilpela A & Kostamovaara J (2000) An integrated receiver channel for
picosecond range laser radar pulses. Proceedings of the 43rd IEEE Midwest Symposium
on Circuits and Systems 2: 702–705.
Poultney SK (1972) Single Photon Detection and Timing in the Lunar Laser Ranging
Experiment. IEEE Transactions on Nuclear Science 19(3): 12–17.
Rochas A, Besse P-A & Popovic RS (2001) A Geiger mode avalanche photodiode fabricated
in a conventional CMOS technology. Proceeding of the 31st European Solid-State
Device Research Conference: 483–486.
Rochas A, Gani M, Furrer B, Besse PA, Popovic RS, Ribordy G & Gisin N. Single photon
detector fabricated in a complementary metal–oxide–semiconductor high-voltage
technology. Review of Scientific instruments 74(7): 3263–3270.
Ruotsalainen T, Palojarvi P and Kostamovaara J (2001) A wide dynamic range receiver
channel for a pulsed time-of-flight laser radar. IEEE Journal of Solid-State Circuits
36(8): 1228–1238.
Ryvkin B, Avrutin EA & Kostamovaara JT (2009) Asymmetric-waveguide laser diode for
high-power optical pulse generation by gain switching. Journal of Lightwave
Technology 27(12): 2125–2131.
Ryvkin BS, Avrutin EA & Kostamovaara JT (2011) Quantum well laser with an extremely
large active layer width to optical confinement factor ratio for high-energy single
picosecond pulse generation by gain switching. Semiconductor Science and
Technology 26(4): 045010.
Ryvkin BS, Avrutin EA & Kostamovaara JT (2013) Narrow versus broad asymmetric
waveguides for single-mode high-power laser diodes. Journal of Applied Physics
114(1): 013104.
Schwarz B (2010) Lidar: mapping the world in 3D. Nature Photonics 4(7): 429–430.
Shin D, Kirmani A, Goyal VK & Shapiro J (2014) Computational 3D and reflectivity
imaging with high photon efficiency. IEEE International Conference on Image
Processing (ICIP): 46–50.
Texas Instruments (2011) LIDAR system design for automotive/industrial/military
applications. Application note SNAA123.
82
Vainshtein SN, Yuferev VS & Kostamovaara JT (2003) Avalanche transistor operation at
extreme currents: Physical reasons for low residual voltages. Solid-State Electronics
47(8): 1255–1263.
Vainshtein S, Kostamovaara J, Sveshnikov Y, Gurevich S, Kulagina M, Yuferev V, Shestak
L & Sverdlov M (2004) Superfast high-current switching of GaAs avalanche transistor.
Electronics Letters 40(1): 85-86.
Villa F, Lussana R, Bronzi D, Tisa S, Tosi A, Zappa F, Dalla Mora A, Contini D, Durini D,
Weyers S & Brockherde W (2014) CMOS imager with 1024 SPADs and TDCs for
single-photon timing and 3-D time-of-flight. IEEE Journal of Selected Topics in
Quantum Electronics 20(6): 364–373.
Wang J & Kostamovaara J (1994) Radiometric analysis and simulation of signal power
function in a short-range laser radar. Applied Optics 33(18): 4069–4076.
Wilman ES, Gardiner SH, Nomerotski A, Turchetta R, Brouard M & Vallance C (2012) A
new detector for mass spectro-metry: Direct detection of low energy ions using a multipixel photon counter. Review of Scientific Instruments. 83: 013304.
Yudovsky D & Pilon L (2009) Simple and accurate expressions for diffuse reflectance of
semi-infinite and two-layer absorbing and scattering media. Applied Optics 48: 6670–
6683.
Zappa F, Giudice A, Ghigni M & Cova S (2002) Fully-integrated active-quenching circuit
for single-photon detection. Proceedings of European Solid-State Circuit Conference
ESSCIRC-02: 355–358.
Zhang Z, Yuan Z, Yong Z, Long W & Jianzhong S (2013) A real-time noise filtering strategy
for photon counting 3D imaging lidar. Optics Express 21(8): 9247–9254.
83
84
Original publications
I
II
III
IV
V
VI
VII
VIII
Hallman L W & Kostamovaara J (2008) Effect of signal quantum shot noise on the jitter
of leading edge detected and high-pass discriminated laser pulse signals. Measurement
Science and Technology 19(8): 085303.
Hallman L W, Ryvkin B, Haring K, Ranta S, Leinonen T & Kostamovaara J (2010)
Asymmetric waveguide laser diode operated in gain switching mode with high-power
optical pulse generation. Electronics Letters 46(1): 65–66.
Nissinen I, Nissinen J, Länsman A K, Hallman L, Kilpelä A, Kostamovaara J, Kögler
M, Aikio M & Tenhunen J (2011) A sub-ns time-gated CMOS single photon avalanche
diode detector for Raman spectroscopy. Proceedings of the European Solid-State
Device Research Conference (ESSDERC). Helsinki, Finland: 375–378.
Hallman L W, Haring K, Toikkanen L, Leinonen T, Ryvkin B S & Kostamovaara J T
(2012) 3 nJ, 100 ps laser pulses generated with an asymmetric waveguide laser diode
for a single-photon avalanche diode time-of-flight (SPAD TOF) rangefinder
application. Measurement Science and Technology 23(2): 025202.
Hallman L W, Haring K, Toikkanen L, Leinonen T, Ryvkin B S & Kostamovaara J T
(2012) Compact laser pulser for TOF SPAD rangefinder application. Proceedings of
SPIE Photonics West. San Francisco CA.
Hallman L W & Kostamovaara J (2014) Note: Detection jitter of pulsed time-of-flight
lidar with dual pulse triggering. Review of Scientific Instruments 85(3): 036105.
Hallman L W, Huikari J & Kostamovaara J (2014) A high-speed/power laser transmitter
for single photon imaging applications. Proceedings of IEEE Sensors. Valencia, Spain:
1157–1160.
Kostamovaara J, Huikari J, Hallman L, Nissinen I, Nissinen J, Rapakko H, Avrutin E
& Ryvkin B (2015) On laser ranging based on high-speed/energy laser diode pulses and
single-photon detection techniques. IEEE Photonics Journal 7(2): 7800215.
Reprinted with permission from IOP Publishing (I, IV), IET (II), IEEE (III, VII,
VIII), SPIE (V) and AIP Publishing (VI).
The original publications are not included in the electronic version of the
dissertation.
85
86
C555etukansi.kesken.fm Page 2 Wednesday, November 11, 2015 9:42 AM
ACTA UNIVERSITATIS OULUENSIS
SERIES C TECHNICA
539.
Karhu, Mirjam (2015) Treatment and characterisation of oily wastewaters
540.
Panula-Perälä, Johanna (2015) Development and application of enzymatic
substrate feeding strategies for small-scale microbial cultivations : applied for
Escherichia coli, Pichia pastoris, and Lactobacillus salivarius cultivations
541.
Pennanen, Harri (2015) Coordinated beamforming in cellular and cognitive radio
networks
542.
Ferreira, Eija (2015) Model selection in time series machine learning applications
543.
Lamminpää, Kaisa (2015) Formic acid catalysed xylose dehydration into furfural
544.
Visanko, Miikka (2015) Functionalized nanocelluloses and their use in barrier and
membrane thin films
545.
Gilman, Ekaterina (2015) Exploring the use of rule-based reasoning in ubiquitous
computing applications
546.
Kemppainen, Antti (2015) Limiting phenomena related to the use of iron ore
pellets in a blast furnace
547.
Pääkkönen, Tiina (2015) Improving the energy efficiency of processes : reduction
of the crystallization fouling of heat exchangers
548.
Ylä-Mella, Jenni (2015) Strengths and challenges in the Finnish waste electrical and
electronic equipment recovery system : consumers’ perceptions and participation
549.
Skön, Jukka-Pekka (2015) Intelligent information processing in building monitoring
systems and applications
550.
Irannezhad, Masoud (2015) Spatio-temporal climate variability and snow resource
changes in Finland
551.
Pekkinen, Leena (2015) Information processing view on collaborative risk
management practices in project networks
552.
Karjalainen, Mikko (2015) Studies on wheat straw pulp fractionation :
Fractionation tendency of cells in pressure screening, hydrocyclone fractionation
and flotation
553.
Nelo, Mikko (2015) Inks based on inorganic nanomaterials for printed electronics
applications
554.
Kursu, Olli-Erkki (2015) Micromotion compensation and a neural recording and
stimulation system for electrophysiological measurements
Book orders:
Granum: Virtual book store
http://granum.uta.fi/granum/
C555etukansi.kesken.fm Page 1 Wednesday, November 11, 2015 9:42 AM
C 555
OULU 2015
UNIVERSITY OF OUL U P.O. Box 8000 FI-90014 UNIVERSITY OF OULU FINLA ND
U N I V E R S I TAT I S
O U L U E N S I S
ACTA
A C TA
C 555
ACTA
UN
NIIVVEERRSSIITTAT
ATIISS O
OU
ULLU
UEEN
NSSIISS
U
Lauri Hallman
University Lecturer Santeri Palviainen
Postdoctoral research fellow Sanna Taskila
Professor Olli Vuolteenaho
Lauri Hallman
Professor Esa Hohtola
SINGLE PHOTON
DETECTION BASED DEVICES
AND TECHNIQUES FOR
PULSED TIME-OF-FLIGHT
APPLICATIONS
University Lecturer Veli-Matti Ulvinen
Director Sinikka Eskelinen
Professor Jari Juga
University Lecturer Anu Soikkeli
Professor Olli Vuolteenaho
Publications Editor Kirsti Nurkkala
ISBN 978-952-62-1043-8 (Paperback)
ISBN 978-952-62-1044-5 (PDF)
ISSN 0355-3213 (Print)
ISSN 1796-2226 (Online)
UNIVERSITY OF OULU GRADUATE SCHOOL;
UNIVERSITY OF OULU,
FACULTY OF INFORMATION TECHNOLOGY AND ELECTRICAL ENGINEERING,
DEPARTMENT OF ELECTRICAL ENGINEERING;
INFOTECH OULU
C
TECHNICA
TECHNICA