Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Specific impulse wikipedia , lookup
Hunting oscillation wikipedia , lookup
Coriolis force wikipedia , lookup
Fluid dynamics wikipedia , lookup
Fictitious force wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Classical central-force problem wikipedia , lookup
Equations of motion wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Sudden unintended acceleration wikipedia , lookup
Centripetal force wikipedia , lookup
A.MER. Zoou, 24:121-134 (1984)
Unsteady Aspects of Aquatic Locomotion1
THOMAS L. DANIEL2
Department of Zoology, Duke University,
Durham, North Carolina 27706
SYNOPSIS. Virtually all animals swim unsteadily. They oscillate appendages, undulate,
and produce periodic propulsive forces so that the velocity of some part of their bodies
changes in time. Because of their unsteady motion, animals experience a fluid force in
addition to drag—the acceleration reaction. The acceleration reaction dominates the
forces resisting rapid accelerations of animals and may be responsible for generating thrust
in oscillating appendages and undulating bodies. The ever-present unsteady nature of
animal swimming implies diverse applications of the acceleration reaction.
INTRODUCTION
a force occurs and cannot be summarily
neglected. This force, called the "acceleration reaction," depends on the instantaneous acceleration, not velocity, of an
object relative to its fluid environment
(Batchelor, 1967). While drag is resistance
to motion through a fluid, the acceleration
reaction is resistance to changes in the
velocity of that motion.
The acceleration reaction has been critical in understanding the mechanics of
aquatic animal locomotion. LighthilPs
(1960, 1970) "reactive elongated-body"
theories consider the propulsive force of
undulating fish to arise from the acceleration reaction. Similarly, analyses of caudal
and pectoral fin propulsion (Blake, 1981a,
b) and specialized swimming behaviors such
as turning (Weihs, 1972) and rapid starts
in fish and crayfish (Webb, 1979a, 1982)
are all based, in part, on the acceleration
reaction.
The acceleration reaction is likely to be
important in low speed flight and hovering
as well as in swimming mechanics. Thus,
Vogel (1962) demonstrated that the frequency of the unsteady, periodic motion
of Drosophila wings is influenced by the
density of the air in which they beat. His
results are indicative of a role for the acceleration reaction in insect flight. Ellington
(1980, 1981) showed that the lift generated
by the flapping wings of insects depends
strongly on unsteady flow phenomena.
1
While the acceleration reaction is clearly
From the Symposium on Biomechanics presented
at the Annual Meeting of the American Society of relevant to animal locomotion we know
Zoologists, 27-30 December 1982, at Louisville, Ken- surprisingly little about its practical behavtucky.
2
Present address: Department of Zoology, Univer- ior and effects. In this paper, I develop
simple methods for dealing with the accelsity of Washington, Seattle, Washington 98250.
Whenever animals move relative to a
fluid environment, forces are generated.
Drag and lift predominate in analyses of
the mechanics of animal locomotion. In
practice, drag and lift commonly refer to
steady state motion and the instantaneous
velocity of an animal relative to the fluid.
But animals and their appendages do not
often move in a steady manner. Animals
that swim with oscillating fins and flippers;
animals that accelerate to escape predation
or attack their prey; eels, worms, snakes
and fish which swim by undulations; and
animals such as jellyfish and squid which
swim with a pulsatile thrust force—all produce and encounter unsteady flows. In part,
the almost complete lack of wheels in animals (Gray, 1968; LaBarbera, 1982) gives
rise to this diverse array of undulating and
reciprocating thrust producing mechanisms. In biology, steady motion appears
to be more the exception than the rule.
For accelerating and decelerating animals a quasi-steady analysis might yield
estimates of the relevant forces. In such an
analysis, steady-state forces (measured or
calculated) are integrated to obtain the
average lift or drag acting on an animal or
its propulsive appendages. Explicitly or
tacitly, a quasi-steady approach ignores any
forces associated with acceleration per se.
But for objects accelerating in a fluid, such
121
122
THOMAS L. DANIEL
eration reaction and explore applications
of the acceleration reaction in animals that
swim unsteadily or move appendages in an
unsteady fashion. Thus I will describe (1)
the behavior and limitations of the acceleration reaction, (2) how the acceleration
reaction can be used to produce thrust, and
(3) how the acceleration reaction resists the
motion of animals undergoing periodic
propulsion.
WHERE UNSTEADY FLOWS OCCUR
In the strictest sense, unsteady flows arise
whenever the density, viscosity or velocity
of a fluid at any point in space changes with
time (Streeter, 1975). Time-dependent
changes in viscosity and density are likely
to be rare in an aquatic environment and,
therefore, need not be discusssed here. Let
us consider only those cases in which the
velocity of an animal or an appendage
changes in time and thus generates an
unsteady motion of the fluid around it.
"The world is full of unsteady time-varying flows" (Vogel, 1981). Animals that swim
with body undulations, reciprocating
appendages, and pulsatile propulsive forces
all produce and encounter unsteady flows.
Indeed, animals need not locomote to
encounter unsteady flows. For example,
barnacles, limpets, and snails living in rocky
intertidal regions experience the periodic
impact of breaking waves with accelerations of more than 100 m/sec 2 (Denny et
al., in preparation). Also, sea anemones are
subject to subsurface wave surge (Koehl,
1977). And unsteady flows are by no means
limited to aquatic environments. Vogel
(1981) suggests that vortex shedding (periodic release of vortices) might aid spore
release in certain mosses. Vortex shedding
gives rise to flows which can induce oscillation in flexible structures, and thereby
create even more unsteadiness in the flow.
Still other examples of unsteady flows can
be found in the ever present periodic flows
within circulatory and respiratory systems.
While unsteadyflowsare important in flight
(Ellington, 1980, 1981) and may be important to organisms in gusty winds and surging waves or even sessile creatures shedding vortices, I will focus on unsteady flows
about swimming animals. I use swimming
animals to illustrate one basic aspect of
unsteady flow—the acceleration reaction.
T H E ACCELERATION REACTION AND
ITS COEFFICIENT
The theory underlying the acceleration
reaction is part of a vast body of theory
concerning ideal fluids. Ideal fluids have
density but no viscosity and are, thus, said
to be inviscid. In ideal flows drag does not
exist, but the acceleration reaction does
occur. In real fluids (those with some viscosity) both drag and the acceleration reaction will exist.
If a body moves through a real fluid at
constant velocity, drag will resist its motion.
If, however, the body moves at constant
velocity in an ideal fluid it will experience
no net force since, in inviscid flows, the
pressure distribution will be symmetric
about the plane of the body perpendicular
to its direction of motion (Batchelor, 1967).
But the body displaces fluid and, as it moves,
fluid must be moved from in front of the
body to its rear, going around and not
through the body. Motion of the body,
therefore, induces some motion in the ideal
fluid. Even though the body induces
motion, it experiences no net force. This
situation is known as "d'Alembert's paradox" (Batchelor, 1967): no force is required
to move a body at constant velocity in an
ideal fluid. But fluids are, for the most part,
not ideal. They have some viscosity. Viscosity robs fluid of its momentum as it
moves around a body and gives rise to pressure drag (an asymmetric fore/aft pressure
distribution) and skin friction (viscous
stresses at the surface of the object).
Based on the above arguments one would
incorrectly assume that to increase the
velocity of a body in an ideal fluid would
require no force other than that required
to accelerate the mass of the body. But in
accelerating the body we must also accelerate fluid around it. Work must be done
to increase the kinetic energy of the fluid
around it as well as to increase the kinetic
energy of the body.
In short, when an object accelerates in
a fluid, a force must be applied to increase
the kinetic energy of both object and fluid.
The force required to increase the kinetic
123
UNSTEADY SWIMMING
energy of the fluid is called the acceleration
reaction. In real flows, the acceleration
reaction acts in addition to drag to resist
motion.
The acceleration reaction (G) depends
on the size, shape and acceleration of the
body. To an external observer, it has the
same effect as an increase in the mass of
the body; thus it is defined in the following
way:
G = -apV(du/dt)
(1)
where a is the added-mass coefficient, p is
the density of the fluid, V is the volume of
the body and (du/dt) is its acceleration relative to the fluid far away from it. With a
dimensionless, G has dimensions of force.
Equation (1) may be used to define two
additional terms: the added-mass and the
virtual-mass of an object. The added-mass
is simply the product apV, which represents
the additional mass of fluid that must be
accelerated in order to accelerate a body
surrounded by fluid. The virtual-mass is
the sum of the mass of the body and the
added-mass. Size dependence of the acceleration reaction is given by the volume factor: larger bodies will experience a greater
force.
The sign of (du/dt) indicates the direction in which the acceleration reaction will
act. When a body accelerates, (du/dt) is
positive and G will act in a direction opposite to the body's motion (in the same direction as the drag force). When a body decelerates, (du/dt) will be negative and G will
act in the same direction as the body's
motion (in a direction opposite to that of
the drag force). Hence the acceleration
reaction resists both acceleration and deceleration of a body.
Shape dependence of the acceleration
reaction is given by the size-independent
added-mass coefficient, a. For spheres, the
added-mass coefficient is 0.5; for cylinders
whose long axes are normal to the direction of motion, 1.0. The added-mass coefficient depends as well on the orientation
of an object relative to its direction of
motion. For example, an oblate spheroid
("M&M" shape) traveling in a direction
parallel to its axis of rotation (moving
broadside) has a higher added-mass coef-
.a
2.0 -
20
30
length/diameter
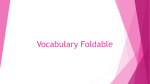
FIG. 1. A plot of the theoretical added-mass coefficients as a function of the length to diameter (fineness)
ratio for spheroids (solid line) and elliptical cylinders
(broken line). The length to diameter ratio is the ratio
of the axis parallel to the direction of motion to the
axis perpendicular to the direction of motion. The
axis of rotation for ellipsoids is the length axis (from
Daniel, 1983). Note, an infinite added-mass coefficient does not imply infinite resistance to acceleration.
The reaction in the fluid is proportional to the addedmass (a-7n), m — 0 as a — oo, the limit of the product
is finite and size dependent.
ficient than a sphere. When traveling in a
direction perpendicular to that axis (moving sideways), its added-mass coefficient is
less than that for a sphere. Added-mass
coefficients for a variety of spheroids and
elliptical cylinders are given in Figure 1.
Analytical solutions for the added-mass coefficients of spheroids, cylinders, toroids
and cubes can be found in Lamb (1932),
Birkhoff (1960), Kochin et al. (1964) and
Batchelor (1967). For more complicated
shapes, analytical solutions to the addedmass coefficients are difficult to obtain. An
empirical method for evaluating the coefficient is given by Daniel (in preparation).
We see, then, that the acceleration reaction differs from drag in three important
aspects. (1) The acceleration reaction is
directly proportional to the volume of an
object while drag is more nearly proportional to its surface or cross-sectional area.
(2) The acceleration reaction depends on
changes in the velocity of an object while
124
THOMAS L. DANIEL
drag depends on the instantaneous value
of the object's velocity. The acceleration
reaction resists both acceleration and deceleration while drag resists acceleration
and augments deceleration. (3) The coefficient associated with drag (drag coefficient, Crf) differs from that associated with
the acceleration reaction (added-mass coefficient, a). The drag coefficient is a function of the size, shape and velocity of an
object and is usually presented as a function of Reynolds number (Re, a ratio of
inertial to viscous forces). The added-mass
coefficient depends only on shape. Also,
the way in which these coefficients depend
on shape is quite different. For example,
the added-mass coefficient for a thin flat
plate moving broadside is infinite while the
drag coefficient relative to the surface area
of the plate is about 1.0 (in a Re range of
10 4 -10 5 ). For a flat plate moving edge-on,
the added-mass coefficient is zero (Batchelor, 1967) and the drag coefficient is 0.05
over a similar Re range (Hoerner, 1965).
Note, however, that an infinite added-mass
coefficient does not imply infinite resistance to acceleration. Recall that the reaction is proportional to the product of a and
V. For a thin circular disc moving broadside, V is zero. The limit of the product aV
is 8a 3 /3 where a is the radius of the disc
(Batchelor, 1967).
There are two important limitations on
applying equation (1) to movement ofanimals in fluids. (1) Swimming animals
rarely maintain a rigid, non-flexing shape.
Swimming movements such as undulations
or reciprocation of appendages result in
time-varying shapes and, hence, time-varying added-mass coefficients. Therefore,
changes in geometry must be considered
in mechanical analyses of swimming. This
same limitation also applies to analyses of
drag on animals and has been a stumbling
block in analyses of fish swimming (Lighthill, 1975; Wu, 1977; Daniel, 1981). (2)
The acceleration reaction and its coefficient are derived from ideal flow theory
which admits no vorticity (ultimately, formation of vortices in theflow).But unsteady
flow near a boundary generates some vorticity which diffuses away from the boundary by the action of viscosity (Batchelor,
1967). As an object accelerates from rest,
vortices are formed and subsequently shed,
and the pattern of flow will thus change in
time. When vortex formation and shedding occurs, one can no longer blindly trust
analytical solutions for the added-mass coefficient. Vorticity, though, diffuses into the
flow about an object over some finite
amount of time and, for low amplitude,
short duration accelerations, vorticity will
not significantly affect the flow. Birkhoff
(1960) suggests a rule of thumb: ideal flow
theory is applicable for the first few diameters of travel. For a sphere of diameter
D, we can use an added-mass coefficient of
0.5 as the sphere accelerates through a distance of about 3D. Beyond about three
diameters of travel, the acceleration reaction may be quite large relative to drag but
we can no longer determine its magnitude
analytically. At the very least, time averaged empirical estimates of added-mass
coefficients are needed to determine the
unsteady forces acting on animals or
appendages undergoing accelerations in
motions of large amplitude.
BIOLOGICAL APPLICATIONS
Can a body propel itself by virtue of the
acceleration reaction alone? Certainly, if
an animal accelerates a limb in one direction, it will propel itself in the opposite
direction. Unfortunately, the limb cannot
be accelerated forever; at some point it
must return to its initial position. Thus we
must ask: can an animal propel itself with
periodic deformations of its body?
These questions are surrounded by considerable controversy. With a generalized
momentum theorem, Wu (1976) lays the
groundwork for analyzing cyclic averages
of forces due to periodic deformations.
Benjamin and Ellis (1966) and Saffman
(1967) have shown that a body can propel
itself with periodic deformations so long as
there is some fore/aft asymmetry in the
deformations. In the following, I argue that
cyclic averages of the acceleration reaction
are zero only under some fairly weak symmetry conditions.
There is an endless list of biological situations in which the acceleration reaction
UNSTEADY SWIMMING
125
will be an important force. Let us consider
three broad classes of unsteady motion in
swimming animals: (1) paddles, fins and
flippers, (2) undulators and (3) jet propulsors.
Paddles, fins and flippers
A casual survey of swimming mechanisms reveals a remarkable variety of animals which use some sort of oar-like device
to produce thrust. Fish tails and pectoral
fins, polychaete parapodia, and hindlimbs
of aquatic beetles, bugs, and frogs are a
few examples of appendages used for swimming. All of these appendages reciprocate
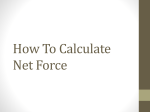
to produce thrust and their motion is, FIG. 2. A diagram of the components of the acceltherefore, unsteady. Consider two well eration reaction acting on one of the paired hindlimbs
a dytiscid beetle. In panel i, the limbs are just beginstudied examples: the caudal fin of ostra- of
ning to accelerate posteriorly; decelerating at the end
ciiform fishes and hindlimbs of dytiscid of the stroke in panel ii with the limbs ending parallel
beetles. Two points emerge: (1) the accel- to the long axis of the body. The motion is reversed
eration reaction on an oscillating appen- in panels iii and iv. A positive sign by the curved arrow
dage may generate thrust and (2) there indicates acceleration; negative, deceleration.
exists a distinct set of kinematic parameters
which maximize the thrust produced by
oscillation of paired appendages.
Aquatic insects. A variety of aquatic insects acceleration reaction is zero also—the beeswim by rowing hindlimbs which are tle cannot swim by either scheme.
fringed with long setae (Alexander, 1968).
In reality, the hindlimbs of dytiscid beeDytiscid beetles are the most extensively tles oscillate about an axis tilted approxistudied of these insect rowers (Hughes, mately 2ir/3 radians (120 degrees) relative
1958; Nachtigall, 1960, 1980; Nachtigall to the long axis of the animal (Nachtigall,
and Bilo, 1975), with excellent measure- 1960). Consider only the acceleration reacments of limb and body kinematics and drag tion acting on paired hindlimbs oscillating
coefficients (Nachtigall, 1960). These have about an axis behind the plane perpendicbeen used in mechanical analyses of swim- ular to the animal's motion. Two questions
ming in which thrust was assumed to arise arise: (1) can the acceleration reaction genfrom the drag which resists the motion of erate thrust? (2) how do the amplitude and
the hindlimbs (Alexander, 1968; Nachti- axis of oscillation affect the magnitude of
gall, 1980). But, because the limbs oscillate the acceleration reaction? The first, qualback and forth, their motion is unsteady; itative, question is answered by inspecting
and an analysis of thrust production which the components of force acting on a hindignores the acceleration reaction may be limb.
inappropriate.
Figure 2 is a diagram of the components
Consider a beetle with hindlimbs that of the acceleration reaction acting on one
oscillate in a horizontal plane back and of a pair of hindlimbs. As these limbs accelforth about a line in that plane (the stroke erate backwards at the beginning of a stroke
axis) perpendicular to the animal's motion. (Fig. 2i), the acceleration reaction will act
If the shape of the hindlimbs does not approximately normal to their surface with
change, a quasi-steady analysis finds that some forward and medially directed comthe net force for a cycle of oscillation is ponents. Since paired limbs move in conzero. Moreover, because these paired limbs cert, medially directed components will
oscillate symmetrically about an axis per- cancel and forward components will add.
pendicular to the animal's motion, the net As the limbs decelerate at the end of the
126
THOMAS L. DANIEL
Stroke
angle
(ir )
FIG. 3. (a) The average thrust force arising from the
acceleration reaction acting on a hindlimb is plotted
against the stroke angle (7,) for a variety of midstroke
positional angles (72). A beat frequency of 3 Hz and
limb dimensions of 1 cm in length and 0.5 cm in width
were used in generating this graph. These values correspond to those presented by Nachtigall (1960) for
dytiscid beetles. The equation that describes the force
0
"
[-cos(. - ( *
72
where a is the width of the limb; L its length, and u
the frequency of oscillation. Angles are defined in
Figure 3b. / , is a Bessel function of order 1.
first half cycle and accelerate at the beginning of the second half cycle (Fig. 2i, iii),
the lateral components again cancel and
the rearward components will add, reducing the net thrust. But if the limbs are perfectly parallel to the long axis of the body
at this stage, this rearward component will
be zero. Finally, at the end of the stroke,
deceleration of the limbs gives rise to a
forward directed component of the acceleration reaction. We see, then, the crucial
role of the rearward axis of the stroke.
And, as Saffman (1967, p. 389) points out,
propulsion may occur only when "the shape
of the body when the recoil [acceleration
reaction] is sending it forward is different
from the shape when recoil is sending it
back."
Figure 3a summarizes the effects of
stroke angle and axis of rotation on the
average thrust force resulting from the
acceleration reaction (angles are defined in
Fig. 3b). Notice that a stroke angle and axis
of oscillation 2ir/3 radians maximizes the
average thrust force. And, indeed, Nachtigall (1960) found that the stroke angle
and axis of rotation for swimming dytiscid
beetles were both 2ir/3 radians (no error
indicated). His data suggest that dytiscid
beetles move their appendages in a way
that would maximize propulsive force if
the acceleration reaction were the dominant source of thrust. The analysis should
apply, as well, to many other aquatic insects.
The acceleration reaction provides a
mechanism by which an oscillating appendage can produce thrust. But its quantitative application to swimming in dytiscids
encounters two important limitations. First,
the hindlimbs of dytiscids change shape
within each cycle of oscillation. The setae
on these limbs expand during the power
stroke (first half cycle of oscillation) and
fold during the recovery stroke (second half
cycle of oscillation). The effect of this
asymmetry on the net drag and acceleration reaction is unknown. Second, the large
amplitude of the oscillations of the hindlimbs confounds a rigorous analysis of the
acceleration reaction. As stated above, large
amplitude oscillations give rise to vortex
shedding and, therefore, to an unknown
added-mass coefficient. Even within these
limitations, consideration of the unsteady
nature of limb motion reveals a novel
mechanism for thrust production which has
rarely been considered (for an exception,
see Blake, 1981a, b, c) and which is entirely
consistent with the observed motions.
Fish tails. Ostraciiform swimming is an
extreme mode in the continuum of locomotory patterns found among fishes
(Breder, 1926). This mode, named after
the family Ostraciidae (boxfishes and cowfishes), is characterized by pendulum-like
oscillations of a rigid tail on a rigid body
(Blake, 1981a). On the assumption of steady
or quasi-steady drag forces this form of
motion can generate no thrust (in the
absence of vorticity) (see Fig. 4a). But the
motion of a wagging tail is unsteady, with
its lateral velocity varying sinusoidally
(Smith and Stone, 1961; Bainbridge, 1963;
Blight, 1977; Blake, 1981a).
Consider the application of the acceler-
UNSTEADY SWIMMING
127
Quasi - steady
I
Unsteady
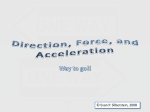
FIG. 4. A diagram of the instantaneous force vectors on the caudal fin of a fish. The fin is oscillated in a
symmetrical fashion about a line along the long axis of the fish, (a) A quasi-steady analysis of the forces acting
on the fin which the acceleration reaction is neglected. In the left-hand panel, the tail is moving from an
extreme lateral position to the midline; from the midline to the opposite position in panel ii. The motion is
reversed in panels iii and iv. Notice that all components of force cancel for this model, (b) An unsteady analysis
of the forces acting on the tail in which steady forces are neglected. The motion of the tail is identical to that
of the above. Here, the forward components of the forces add.
ation reaction to unsteady fin movements
(for simplicity, neglecting drag) (Fig. 4b).
As the fin accelerates from an extreme lateral position to the midline, the acceleration reaction will resist its motion. The
acceleration reaction vector will, like drag,
act roughly normal to the surface of the
fin with components directed laterally and
forward (Fig. 4bi). As the fin decelerates
from the midline to the opposite extreme,
the acceleration reaction will be negative—that is, it will resist deceleration of
the fin, and try to keep it moving. Here,
then, lateral components will cancel and
forward components will add over the first
half cycle of oscillation. The second half
of the cycle gives an identical result, forward components again adding. Over an
entire fin beat cycle, the net lateral component is zero and the forward-directed
component is positive, therefore providing
a net thrust.
Thus neglect of the consequences of the
unsteadiness of fin motion leads to the
incorrect conclusion that no thrust can be
produced. An unsteady model provides a
possible mechanism for thrust generation
by a rigid oscillated fin (see the example
Smith and Stone, 1961; Blake, 1981a). In
reality, some combination of quasi-steady
and unsteady phenomena determine the
actual thrust produced.
The above analysis of caudal fin propulsion is not intended to be a description of
the total thrust produced by fin oscillation;
it only serves to point out a potential effect
of the acceleration reaction. In reality, fish
locomotion is dominated not by forces acting parallel to the direction of fluid motion
(such as drag and the acceleration reaction)
but by forces acting perpendicular to the
direction of fluid motion—lift forces (see
for example, Wu, 1971a, b, c).
Caudal fins move unsteadily and the lift
128
THOMAS L. DANIEL
These generalizations apply to many swimming animals including fish using pectoral
fins, polychaetes using parapodia, frogs,
and turtles.
Reduced
frequency
(a-fl/U'l
FIG. 5. A diagram showing the decrease in lift on a
tail as a function of the reduced frequency parameter
a =f-l/U where/is the frequency of lateral oscillation, / is the length of the tail, and U is the forward
speed of the fish (see inset). Lo is the lift on the tail
without any lateral oscillations (calculated from Lighthill, 1975, p. 96).
produced by their motion is strongly
affected by the degree of unsteadiness. A
common measure of unsteadiness for
hydro- and airfoils is called the reduced
frequency parameter, a (Wu, 197la, b, c;
Lighthill, 1975):
a=f-l/U
(2)
where/is the frequency of lateral oscillation, I is the length of the tail, and U is the
forward speed of the animal. When the
reduced frequency parameter is greater
than 1.0, the thrust produced by lift is
reduced to one half of its quasi-steady value
(see Fig. 5). For many fish, the reduced
frequency parameter exceeds 1.0 (Yates,
1983). It may be possible for the acceleration reaction to offset any reduction in lift
due to unsteady motion of fins. The interaction between lift and the acceleration
reaction remains unexplored.
Three generalizations may be drawn
from the above examples: (1) The acceleration reaction on an oscillated appendage generates thrust in a direction parallel to the axis of oscillation for the
appendage. (2) Oscillation of paired
appendages generates thrust as long as their
axes of rotation are tilted away from the
plane perpendicular to the direction of the
animal's motion. (3) A stroke angle and
axis of rotation of 2TT/3 radians maximizes
the thrust produced by paired appendages.
Undulators
Less obvious examples of unsteady flow
to which the acceleration reaction might
apply are found in the sinuous swimming
movements of snakes, worms, eels and
sharks. Early theoretical analyses of the
fluid mechanics of their complex swimming patterns assumed that thrust arose
from the "resistance" of water to lateral
undulations (Taylor, 1952). Resistance
depended on the velocity of a segment of
an animal relative to the fluid around it,
and thrust arose from the drag acting on
the undulated portions of the body. In reality, body undulations generate an unsteady
flow with segments of an animal accelerating laterally at different phases of a swimming cycle. This unsteady view of fish
swimming was formalized by Lighthill
(1960) as a "reactive theory" in which it
was shown that accelerated segments of an
undulating fish experience a reactive force
that depends on the lateral acceleration,
not the velocity, of each segment. This
force, the acceleration reaction, provides
thrust for fish which swim by undulation.
The magnitude of the thrust generated by
any laterally accelerated segment is directly
proportional to the added-mass coefficient
of that segment. Lighthill's (1971) "elongated-body theory" is an extension of his
reactive theory. The elongated-body theory relies exclusively on the acceleration
reaction as the source of thrust for swimming fish. It also shows that increases in
the amplitude of swimming undulations
augment the total thrust generated through
the acceleration reaction. In Lighthill's
theoretical work, the acceleration reaction
is critical to fish propulsion.
In addition to generating propulsive
forces, the acceleration reaction determines, in part, the kinematics of swimming
undulations. For example, the head and
tail of a swimming shark undergo a high
degree of lateral oscillation while the center of the body remains laterally stable.
Weihs (1980, 1981) showed that this pat-
UNSTEADY SWIMMING
tern of motion is a direct result of the acceleration reaction. Viewing the body of a
shark as a series of elliptical cylinders,
Weihs argues that the added mass of the
head and tail is low and that of the central
portion of the body is comparatively high.
Since the acceleration reaction is directly
proportional to the added mass, reistance
to lateral acceleration of the head and tail
will be lower than for the central portion
of the body.
129
the animal and its acceleration reaction:
F = ma + ama
(3)
Rearranging equation (3) gives the acceleration as:
a = F/m{\ + a)
(4)
The added-mass coefficient of G. vertens is
approximately 1.0. Thus its initial acceleration should be only about 0.5 m/sec 2
which is in close agreement with measured
values for acceleration of G. vertens (Daniel,
Jet propulsors: Escape and swimming
in preparation). Neglect of the acceleraThe acceleration reaction is also impor- tion reaction overestimates the perfortant as a force resisting the motion of an mance of an accelerating animal.
animal which starts from rest or one which
When escape from predation is imporswims with a periodic propulsive force. tant to the survival of an animal, we expect
Cephalopod molluscs, cnidarian medusae, to see adaptations which give rise to high
salps, siphonophores, and a few aquatic accelerations. Certainly maximizing the
insect larvae (dragonfly) swim by a jet reac- propulsive force will maximize acceleration mechanism in which thrust results from tion during escape. Also, reductions in the
the forceful expulsion of water from some virtual mass ([m + am]) will increase accelinternal cavity (Hughes, 1958; Johnson et eration during escape. Those medusae utial, 1972; Daniel, 1980, 1983; Bone and lizing escape responses are generally proTrueman, 1982). These animals use jet late with length/diameter ratios greater
propulsion both for impulsive escape than 2.0 and, consequently, added-mass
maneuvers and for normal swimming. In coefficients less than 0.2 (Donaldson et al.,
escape, achieving rapid acceleration is 1980; Daniel, in preparation). Squid and
clearly critical to the survival of an animal. dragonfly larvae also use escape responses
In routine swimming, the periodic nature and are also prolate with length/diameter
of the jet gives rise to a discontinuous thrust ratios exceeding 3.0 (Hughes, 1958; Packforce.Their simple swimming movements ard, 1960; Ward and Wainwright, 1972).
and simple shape make jet propulsors ideal Virtual mass can be reduced, as well, by
cases in which to determine the effect of reducing body mass; Webb (19796) argues
the acceleration reaction on locomotion.
that reduced skin mass in certain fishes is
Birkhoff (1960) considered the role of an adaptation for rapid acceleration. But
the acceleration reaction in determining reducing the mass of a jet propelling anithe initial upward acceleration of a hydro- mal does not necessarily result in a higher
gen balloon following release. Here, I adapt acceleration during escape. The propulBirkhofFs example to explore the mechan- sive force is proportional to the mass of the
ics of escape swimming for jet propelling animal because it is proportional to the volanimals. For example, if an animal of mass, ume of water contained within some interm, develops a propulsive force, F, we would, nal cavity.
by Newton's second law, predict its initial
Routine swimming of medusae and squid
acceleration to be F/m. A medusa such as is accomplished by repeated jetting of
Gonionemus vertens undergoing an escape water. The intermittent nature of their
response has an average mass of about thrust gives rise to an unsteady motion
0.002 kg and develops a propulsive force in which the animal undergoes repeated
of about 2 mN (Daniel, 1980, 1983). Hence, accelerations and decelerations. While the
we would predict its initial acceleration to cyclic average velocity of a medusa may be
be about 1 m/sec 2 . But we have neglected constant, its instantaneous velocity will
the acceleration reaction. The propulsive oscillate about some mean value. The aniforce must overcome both the inertia of mal constantly accelerates and decelerates
130
THOMAS L. DANIEL
with the acceleration reaction changing
sign. The acceleration reaction averaged
over one jetting cycle will be zero for an
animal swimming with a constant cyclic
average velocity. Hence, the average velocity of medusae and squid is determined not
by the acceleration reaction, but by the
drag acting on the animal. The instantaneous force resisting the animal's motion
is, however, dominated by the acceleration
reaction (Daniel, 1983). Therefore, the
degree to which the instantaneous velocity
varies from the average is determined by
the acceleration reaction, as well as drag.
Mechanical analyses ofjet propulsion must
consider both steady and unsteady fluid
flow phenomena.
RELATIVE IMPORTANCE OF THE
ACCELERATION REACTION
The acceleration reaction applies to
many aspects of animal swimming. What
remains to be shown is how important the
acceleration reaction is as a force acting on
oscillated appendages or on animals which
swim unsteadily. Recall that in the simple
case of an oscillating rigid appendage drag
cancels. In such cases the acceleration reaction is the only force we need consider.
And, as Lighthill (1971, 1975) has shown,
the acceleration reaction overwhelms the
effects of drag for animals which swim with
large amplitude undulations. For animals
accelerating from rest, such as medusae and
squid undergoing escape maneuvers and
fish predators lunging for their prey, neither the acceleration reaction nor drag
cancel. For these animals, it is possible to
estimate the relative importance of the
acceleration reaction using a simple model
which is applicable to all forms of unsteady
locomotion.
The ratio of the average acceleration
reaction to the average total resistive force
represents the relative importance of the
acceleration reaction. The average acceleration reaction for an animal accelerating
over some time interval (T) is:
(1/T)
X
apV0(du I dt) dt.
(5)
The average total resistive force is simply the sum of the average drag and acceleration reaction:
{[apV0(du/dt)}
+ [0.5pSCdu2]} dt.
(6)
The ratio of equation (5) to equation (6)
gives the relative contribution of the acceleration reaction to the total resistive force:
-X
X
apV0(du/dt) dt/
[apV0(du/dt)
• 0.5pSCdu2] dt
(7)
which can be solved numerically using
existing data for drag and added-mass coefficients. The ratio can have a value anywhere between 0 and 1.0—at 1.0, the
acceleration reaction is the only force acting; at 0, only drag acts. A ratio of 0.5
indicates equal contributions of drag and
the acceleration raction to the total resistive force.
Values of the ratio (equation (7)) are
given in Table 1 for a variety of jet propelled animals accelerating from rest.
Notice that in all cases the ratio is about
equal to or exceeds 0.5. This result shows
that the acceleration reaction is the predominant force experienced by these animals when starting from rest. There are,
however, cases in which the ratio will be
small. Thus, as a sphere is accelerated (at
a constant acceleration) from rest, the
acceleration reaction will maintain some
constant value. Drag will be initially zero
and then increase as the square of the
sphere's velocity (for 102 < Re < 105).
Since velocity increases linearly for constant acceleration, drag will increase in
proportion to the square of elapsed time.
Hence, for constant accelerations the ratio
will drop with time. This result is summarized in Figure 6 for a sphere starting
from rest with a variety of accelerations.
Notice that, the ratio depends on the mag-
131
UNSTEADY SWIMMING
TABLE 1.
animals.
Values for the relative importance of the acceleration reaction (R, see equation (7)) for various jet propelled
Animal
Mass
(g)
Acceleration
(cm/sec')
Duration
(sec)
3
2,000
0.08
0.48
Packard, 1969
1
700
0.08
0.65
Donaldson et al., 1980
100
0.1
0.8
Daniel, 1983
23
0.1
0.92
Bone and Trueman, 1981
Authority
Squid
Loligo vulgans
Medusae
Aglantha digitale
Gonwnemus vertens
2
Salps
Abylopsis tetragona
1
Dragonfly larvae
Anax imperator
1
0.1 data or
0.67
Values not reported explicitly.1 Estimated300*
from author's
figures. Hughes, 1958
-2
I cms
nitude as well as the duration of the acceleration. The ratio is highest for accelerations of short duration.
CONCLUSIONS: BIOLOGICAL IMPLICATIONS
The acceleration reaction is an important determinant of the mechanics of swimming in fluids. We may, in a general way,
extend the arguments presented here to
explore some ecological and evolutionary
aspects of unsteady swimming.
Predator-prey interactions
Rapid linear accelerations during attack
or escape and rapid angular accelerations
during tight turns while an animal is pursued or in pursuit are two situations in
which the acceleration reaction, and thus
the shape and size of an animal will determine, in part, the success or failure of an
animal in a predator-prey interaction.
Where linear acceleration is important to
the survival of an organism we may expect
adaptations for a reduction in virtual mass.
Webb (1979b) has claimed that reduced skin
mass is one such adaptation among fishes.
Streamlining and elongation of an animal
also serve to reduce its virtual mass. We
Time
(s)
may, therefore, expect the overall shape of
an animal to be determined in part by the
FIG. 6. The relative importance of the acceleration
importance of rapid acceleration to its surreaction (/?, see equation (7)) is plotted against time vival.
for a sphere 1 cm in radius starting from rest. Accelerations of 1, 10, 100, and 1,000 cms" 2 are shown.
The ability of an animal to rapidly change
132
THOMAS L. DANIEL
direction while being pursued by a predator or while in pursuit of prey should be
of some selective advantage. High angular
accelerations, a result of a rapid change in
direction, can be achieved if the reaction
in the fluid to sideslip is high. Thus high
added-mass coefficients associated with
motion perpendicular to the long axis of
the animal would be advantageous. During
a turn, an animal must also rotate and, as
with linear translation, there is an addedmass coefficient associated with rotation.
Where maneuverability is important to the
survival of an animal we may expect resistance to impulsive rotation to be minimized and resistance to sideslip to be maximized. Dorsal fins, and lateral compression
serve to augment the added-mass coefficient associated with sideslip. Anteroposterior compression serve to reduce the
added-mass coefficient associated with
rotation. By considering added-mass coefficients for forward swimming, Webb
(1983) showed that turning radius of trout
and bass scales in direct proportion to some
length of a fish (a volume/area ratio).
Depending on the relative magnitudes of
translation and rotation during a turn,
there may be other scaling factors: in particular, the added-mass coefficient for rotation, which is size dependent (see Weihs,
1972, for a detailed analysis of fish turning)Mechanical constraints
Many theories for animal swimming
assume that the deformation of a body or
an appendage is independent of the fluid
forces resulting from their motion (see for
example, Lighthill, 1975; for an exception,
Katz and Weihs, 1977). In reality, fins and
other propulsive appendages are, to varying degrees, flexible. The amount of deformation they undergo is proportional to the
load they experience. The load, in turn,
depends on their motion through the fluid.
For reciprocating appendages, this load is
determined, in part, by the acceleration
reaction. Recall, however, that the acceleration reaction depends on the shape of
an appendage. Thus we encounter a circular argument: the shape of an appendage
depends on the load it experiences; the
load, in turn, depends on the shape.
Animal swimming may, therefore, be
viewed in terms of two constraints. Consider, for example, reciprocating appendages. For given structural properties of an
appendage (such as stiffness in bending)
there must exist constraints on its motion.
Failure or large deformations may occur
when the fluid forces become sufficiently
large. We can expect this particularly in
unsteady flows where the acceleration is
large. Alternatively, for given thrust
requirements, there exist upper limits on
the flexibility of a propulsive appendage:
if an appendage is too flexible it will not
retain the appropriate shape for producing
thrust. Both the structural design of an
appendage and the loading history due to
its unsteady motion will be important
determinants of the mechanics and energetics of aquatic locomotion.
ACKNOWLEDGMENTS
I take great pleasure in thanking Drs. R.
W. Blake, H. F. Nijhout, S. Vogel, P. Webb,
T. Y. Wu and G. T. Yates for critical readings of the manuscript. I am indebted to
Dr. M. Denny for making the Biomechanics symposium and my participation possible. I thank the support of the Cocos
Foundation at Duke University and the
Bantrell Foundation at the California Institute of Technology.
REFERENCES
Alexander, R. McN. 1968. Animal mechanics. Univ.
Wash. Press, Seattle.
Bainbridge, R. 1963. Caudal fin and body movements in the propulsion of somefish.J. Exp. Biol.
40:23-56.
Batchelor, G. K. 1967. An introduction to fluid dynamics. Cambridge Univ. Press, London.
Benjamin, T. B. and A. T. Ellis. 1966. Deformation
of solids by impact of liquids. Phil. Trans., A 260:
221-240.
Birkhoff, G. 1960. Hydrodynamics: A study in logic, fact
and similitude. Princeton Univ. Press, Princeton.
Blake, R. W. 1981a. Mechanics of ostraciiform propulsion. Can. J. Zool. 59:1067-1071.
Blake, R. W. 19816. Influence of pectoral fin shape
on thrust and drag in labriform locomotion. J.
Zool. London 194:53-66.
Blake, R. W. 1981c. Mechanics of drag-based mechanisms of propulsion in aquatic vertebrates. Symp.
Zool. Soc. London 48:29-52.
UNSTEADY SWIMMING
133
the body of Dytiscus marginalis (Dytiscidae,
Blight, A. R. 1977. The muscular control of verteColeoptera). In T. Y. Wu, C. J. Brokaw, and C.
brate swimming movements. Biol. Rev. 52:181Brennen (eds.), Swimming andflyingin nature, pp.
218.
585-595. Plenum Press, New York.
Bone, Q. and E. R. Trueman. 1982. Jet propulsion
of the calycophoran siphonophores Chelophyes and Nachtigall, W. 1980. Mechanics of swimming in water
beetles. In H. Y. Elder and E. R. Trueman (eds.),
Abylopsis. J. Mar. Biol. Assoc. U.K. 62:263-276.
Aspects of animal movement, pp. 107—124. CamBreder, C. M. 1926. The locomotion of fishes. Zoobridge Univ. Press. London.
logical 159-297.
Packard, A. 1969. Jet propulsion and the giant fibre
Daniel, T. L. 1980. Jet propulsion in hydrozoan
response of Lohgo. Nature 221:875-877.
medusae. In C. Hui (ed.), Advisory workshop on
animal swimming, pp. A93-A117. ONR report Saffman, P. G. 1967. The self-propulsion of a
deformable body in a perfect fluid. J. Fluid Mech.
062-653.
28:385-389.
Daniel, T. L. 1981. Fish muscus: In situ measureSmith, E. H. and D. E. Stone. 1961. Perfect fluid
ments of polymer drag reduction. Bio. Bull. 160:
forces in fish propulsion. Proc. Roy. Soc. A 216:
376-382.
316-328.
Daniel, T. L. 1983. Mechanics and energetics of
Streeter, V. L. and E. B. Wylie. 1975. Fluid mechanics.
medusan jet propulsion. Can. J. Zool. 61:1406McGraw-Hill, New York.
1420.
Donaldson, S., G. O. Mackie, and A. O. Roberts. 1980. Taylor, G. 1952. Analysis of the swimming of long
narrow animals. Proc. Roy. Soc. A 214:158-183.
Preliminary observations on escape swimming and
giant neurons in Aglantha digitate (Hydromedu- Vogel, S. 1962. A possible role of the boundary layer
sae: Trachylina). Can. J. Zool. 58:549-552.
in insect flight. Nature 193:1201-1202.
Ellington, C. P. 1980. Vortices and hovering flight. Vogel, S. 1982. Life in movingfluids.Willard Grant
In W. Nachtigall (ed.), Instationdre Effekte an
Press, Mass.
Schwingenden Tierflugeln, pp. 66-101. Akademie Ward, D. V. and S. A. Wainwright. 1972. Locoder Wiss. und der Literatur. Franz Steiner, Wiesmotory aspects of squid mantle structure. J. Zool.
baden.
London 167:437-449.
Ellington, C. P. 1981. The aerodynamics of hovering Webb, P. W. 1979a. Mechanics of escape response
animal flight. Thesis, Cambridge Univ.
in crayfish (Oronectes vinhs). J. Exp. Biol. 79:245—
263.
Gray, J. 1968. Animal locomotion Weidenfeld and
Nicholson, London.
Webb, P. W. 1979A. Reduced skin mass: An adapHughes, G. M. 1958. The co-ordination of insect
tation for acceleration in some teleost fish. Can.
movements. J. Exp. Biol. 35:567-583.
J. Zool. 57:1570-1575.
Johnson, W., P. D. Soden, and E. R. Trueman. 1972. Webb, P. W. 1982. Fast-start resistance of trout. J.
A study in jet propulsion: An analysis of the
Exp. Biol. 96:93-106.
motion of the squid, Lohgo vulgans. J. Exp. Biol. Webb, P. W. 1983. Speed, acceleration and ma56:155-165.
noeuverability of two teleost fishes. J. Exp. Biol.
Katz, J. and D. Weihs. 1977. Hydrodynamic pro(In press)
pulsion by large amplitude oscillation of an airfoil
Weihs, D. 1972. A hydrodynamical analysis of fish
with chordwiseflexibility.J. Fluid Mech. 88:485turning manoeuvres. Proc. Roy. Soc. B 182:59—
497.
72.
Kochin, N. E., I. A. Kibel, and N. V. Rose. 1964.
Weihs,
D. 1980. A series of energy-saving mechaTheoretical hydrodynamics. John Wiley, New York.
nisms in animal swimming. In C. Hui (ed.), AdviKoehl, M. A. R. 1977. Effects of sea anemones on
sory workshop on animal swimming, pp. A241-A270.
the flow forces they encounter. J. Exp. Biol. 69:
ONR report 062-653.
87-105.
Weihs,
D. 1981. Body section variation in sharks—
LaBarbera, M. 1982. Why the wheels won't go. Am.
an adaptation for efficient swimming. Copeia
Nat. 121:395-408.
1981:217-219.
Lamb, H. 1932. Hydrodynamics. Dover, New York.
Wu,T. Y. 1961. Swimming of a waving plate. J. Fluid
Lighthill, M.J. 1960. Note on the swimming of slenMech. 10:321-344.
der fish. J. Fluid Mech. 9:305-317.
Wu, T. Y. 1971a. Hydromechanics of swimming proLighthill, M. J. 1970. Aquatic animal propulsion of
pulsion. Part I. Swimming of a two-dimensional
high hydrodynamical efficiency. J. Fluid Mech.
flexible plate at variable forward speeds in an
44:265-301.
inviscid fluid. J. Fluid Mech. 46:337-355.
Lighthill, M. J. 1971. Large-amplitude elongatedWu, T. Y. 1971 b. Hydromechanics of swimming probody theory of fish locomotion. Proc. Roy. Soc.
pulsion. Part 2. Some optimum shape problems.
B 179:125-138.
J. Fluid Mech. 46:521-544.
Lighthill, M. J. 1975. Mathematical biofluiddynamics.
SIAM, Philadelphia.
Wu,T. Y. 1971c. Hydromechanics ot swimming propulsion. Part 3. Swimming and optimum moveNachtigall, W. 1960. Uber Kinematic, Dynamik und
ments of slender fish with sidefins.J. Fluid Mech.
Energetik des Schwimmens einheimischer Dytis46:545-568.
ciden. Z. Vergl. Physiol. 43:48-180.
Wu, T. Y. 1976. The momentum theorem for a
Nachtigall, W. and D. Bilo. 1975. Hydrodynamics of
134
THOMAS L. DANIEL
deformable body in a perfect fluid. SchifFstechnik Yates, G.T. 1983. Hydromechanics of body and cau23:226-232.
dal fin propulsion. In P. W. Webb and D. Weihs
Wu, T. Y. 1977. Introduction to the scaling of aquatic
(eds.), Fish bwmechanics. Praeger, New York. (In
animal locomotion. In T. J. Pedley (ed.), Scale
press)
effects in animal locomotion, pp. 203-232. Academic Press, New York.