Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Retroreflector wikipedia , lookup
Preclinical imaging wikipedia , lookup
Image intensifier wikipedia , lookup
Super-resolution microscopy wikipedia , lookup
Confocal microscopy wikipedia , lookup
Thomas Young (scientist) wikipedia , lookup
Chemical imaging wikipedia , lookup
Night vision device wikipedia , lookup
Johan Sebastiaan Ploem wikipedia , lookup
Phase-contrast X-ray imaging wikipedia , lookup
Image stabilization wikipedia , lookup
Fourier optics wikipedia , lookup
Optical aberration wikipedia , lookup
BASIC THEORY OF PARTIAL COHERENCE
George B. Parrent, Jr.
Technical Operations Research
Burlington, Massachusetts
INTRODUCTION
In (1) V is the analytic signal associated with the
optical disturbance, which we assume to be a single
Cartesian component of the electric field vector. In
terms of the mutual coherence function, the complex degree of coherence, 1'12 (T) is defined as
The structure for a fundamental treatment of
image formation problems already exists in the
formalism of modern coherence theory as introduced by Wolf.l An adequate introduction to the
subject is provided by Born and Wolf,2 (Chap. 10),
and a detailed description of most of the results of
the theory to date may be found in Beran and
Parrent. 3 Therefore it will not be necessary to review the subject extensively here. Rather, we shall
limit ourselves to a statement of the pertinent definitions and a summary of the treatment of the imaging problem in coherence theory.
(3)
It should be noted that the complex degree of coherence, like the mutual coherence function, is a
function of seven variables, six position coordinates,
and the time-delay coordinate T. The physical significance of these parameters is illustrated by the
example discussed below. The treatment of problems involving partially coherent light involves the
solution of the two wave equations:
BASIC DEFINITIONS
Mutual Coherence Function
The basic entity in the theory of partial coherence
is the mutual coherence function, r I2 (T), which may
be defined by
r I2 (T)
== (~h~2,T)
=
<V(~ht) V*(~2,t
+ T»
(s = 1,2)
where V; denotes the Laplacian operator in the coordinates of the point Xs' A typical problem involves determining the mutual coherence in the
source or object plane, solving (4) to obtain the
mutual coherence on a later surface, such as the
image plane, and then recovering the intensity, I, in
the plane of interest from the relation
(1)
Here the underscore denotes position vector, the
asterisk a complex conjugate, and the sharp brackets indicate a long time average, * i.e.,
1
<J> == lim -2
T-oo
T
IT
Jdt
(4)
(2)
-T
(5)
* Equation
(2) is equivalent to the definition introduced by
Wolf, though in a slightly different form.
Equation (5) follows directly from the definition of
17
From the collection of the Computer History Museum (www.computerhistory.org)
!8
PROCEEDINGS-SPRING JOINT COMPUTER CONFERENCE, 1966
the mutual coherence function and the properties of
the analytic signal.
For a large class of problems the theory outlined
in the preceding paragraph may be greatly simplified. These problems are characterized by the quasimonochromatic approximations, which are stated
as
{~;L\: :< I I}
T
where D.v is the spectral width. Of these two constraints, the second is obviously the more significant. White light may often be treated as quasimonochromatic if the path differences, CiT I, involved in the experiment are suitably small. In
those circumstances for which the approximations
above are applicable, the mutual coherence function may be replaced by the mutual intensity function, r(~I'-~2)'
r (x 1 , ~ 2)
==
r 12
=
r (KI , ~2 , 0)
(6)
The complex degree of coherence reduces to
1"12(0) == 1"12 and the wave equations (4) reduce to
the two Helmholtz equations
(s
1,2)
(7)
of these theorems. We shall reserve a discussion of
the significance of the incoherent limit for a later
point (a comprehensive treatment may be found in
Beran and Parrent,3 Chaps. 2 and 3).
The van Cittert-Zernike Theorem
An additional theorem is required before attacking the treatment of the image formation probl{~m.
The van Cittert-Zernike theorem may be stated as
follows:
The mutual intensity of the illumination
derived from a distant incoherent source
may be expressed in the form
2 ... i
r(XI, X2)
=
J 1(~)eXR f'(~I-~2) d~
(9)
Here I is the intensity distribution across the source,
and R is the distance from the source plane to the
observation plane. If the source is pl.aced- in the
focal plane of a lens and the coherence of the
emergent beam examined, it is found to follow the
same law with the R replaced by the focallengthf
THE IMAGING PROBLEM
where Is:. is the wave number.
Coherent and Incoherent Fields
Equations (1) through (7) provide the basis of the
theory of partial coherence as introduced by Wolf.
To apply this theory to the imaging problem arid
recover the familiar limiting forms, several the~rems
due to Parrent are required. Principal among these
are:
1. A field is coherent if and only if the
mutual intensity function describing it
can be factored in the form
Review of Image Theory
where
V2UC~1)
We may now direct our attention to the formulation of the general imaging problem. As will become clear in the following discussion, a basic description of image formation (at least as far as the
lenses are concerned) already exists in coherence
theory and, in fact, may be found in Refs. 2 and 3.
This theory has not however been appli<;:d to the
significant problems of image evaluation. Indt!ed,
the theory has been applied to very few problems.
In the next section the basic theory is outlined and
those pertinent problems that have been solved are
reviewed and discussed.
+
2
k U(Kd = 0
(8)
2. An incoherent field ~annot exist in free
space; however, an incoherent source
consistent with this· result may be defined.
(For the proof of these theorems and their extensions to polychromatic fields the reader is referred
to Beran and Parrent. J ) Of particular significance
for the problem of image evaluation is the second
In coherence theory an object is described by its
mutual intensity* (or mutual coherence) distribution rather than its intensity distribution. Thus the
object described by rO(~l' ~2) and the relationship
between object and image,-ri(~h.x2)' is developed
by solving the two Helmholtz equations (7) subject
to the appropriate boundary conditions. The gen*Our discussion in this section will be limited to quasi·
monochromatic radiation. This serves to introduce the con(:epts,
and at the same time keeps the development tractable:.
From the collection of the Computer History Museum (www.computerhistory.org)
19
BASIC THEORY OF PARTIAL COHERENCE
eral solution is (see Ref. 3, Chaps. 7 and 8):
C(XI,-X2)
=
J J rO(~I' ~2)K(~1 - ~I)
·K*(~2 - ~2)d~ld~2
(10)
Here K denotes the amplitude impulse response of
the lens; i.e., denoting the complex transmission of
the aperture by A (g), we may write
K(~) = K (
f3 )
2-.:i
AI
= J A(g)e
a·fJ
>./--
det
(II)
The two familiar limits may be recovered from (10)
by using the theorems of the previous section. Thus,
in the coherent limit, r l2 = VI Vf, and (10) reduces
to
CC~I' K2) = J VO(~I )K(~I - ~dd~1
.J V6' (~2 )K* C~2 - ~2 )d~2
(12)
From (12) and theorem I ("Coherent and Incoherent Fields," above), it is clear that the image of
a coherently illuminated object is coherent. A somewhat more surprising result (and certainly more interesting in the image evaluation problem) is obtained in the incoherent limit. Thus, we may take*
r l2 = 1(~1 )O(~I - 6) to describe the object. The
general image~Eq. (10), then reduces to
C(~I'~2)
=
J 1(~)K(~1 - ~)K*(:K2 - ~)d~
(13)
From (13) it is clear that the image mutual intensity
is no longer of the same form as the object mutual
intensity; i.e., the image of an incoherent object is
not incoherent but is partially coherent. This result
will be seen to have rather far-reaching implications
in the problems of image formation.
For most applications, the primary exposing radiation may be safely taken as incoherent. For example, sunlight is coherent only over a distance of
approximately 1/20 mm. Thus, even a reconnaissance system which resolved an inch on the ground
could probably be safely described by the incoherent
limit of Eq. (10). In this case, the intensity in the
image can be obtained by setting ~I = ~2 In (13);
thus
!i(~) =
J 10 (f) 1 K(~
- ~) 12 d~
(14)
Equation (14) will be recognized as the familiar
incoherent imaging equation. The difficulty arises,
of course, when the scale of the mutual coherence
function becomes comparable with the resolution of
the optical instrument. (This point will be discussed
* Actually this form for the incoherent limit is only an approximation and must be used with care. However, it is sumciently
precise to illustrate the present problem.
at length in a later section.) While this condition is
not likely to arise in the original taking system in
the near future, it becomes serious in viewing and
analyzing equipment such as microscopes, enlargers, and microdensitometers at the present state
of the art. If one envisions improvements in taking
equipment of a factor of two or more, it will become
even more serious. This point will become clear as
we analyze transilluminated objects.
While (10) represents the general solution to the
partially coherent imaging problem, a more useful
form for application to spatial filtering is obtained
by considering the object to be a transparency that
is transilluminated. This is, of course, the case in
almost all viewing of reconnaissance imagery, ~nd
certainly in all uses of microscopes and microdensitometers in image evaluation. To describe this class
of problems, it is necessary to describe the object in
terms of its complex transmission t(~). For transilluminated objects Eq. (10) may be expressed as
ri(~I'~2) = J JrO(~I'~2)t(~I)t*(~2)
·K(~I - ~1)K*(~2 - ~2)d~ld~2
(15)
In most cases, one is interested in the intensity of
the image, which may De obtained from (15) by setting ~I = ,!2. Thus,
li(~)
=
J J ro(~], ~2)t(~dt*(~2)K(~ - {d
·K*(~
- ~2)d~ld~2
(16)
In (15) and (16) rO(~I' 6) must be interpreted as the
coherence of the illumInation incident on the transparency. The illumination in most cases of practical
interest will be derived from a primary incoherent
source. In this case rO(~I' ~2) takes a special form(because of the van Cittert-Zernike theorem):
(17)
That is, it becomes a function of coordinate differences only. Under these circumstances (16) becomes
lie,!)
=
J J rO(~1 - ~2)t(~1 )t*(~2)K(~ - ~)
·K*(~ - ~2)dgldg2
(18)
From (18) it is clear that for transilluminated objects the transition from object intensity 1 t(~) 12 to
image intensity is nonlinear. The significa-nce of
this conclusion is that the customary image evaluation techniques and criteria are not, in general, applicable to such systems. For example, knowing
how such a system images sine waves or edges does
not permit us to describe how it images other objects. Furthermore, the same optical system could
From the collection of the Computer History Museum (www.computerhistory.org)
20
PROCEEDINGS-SPRING JOINT COMPUTER CONFERENCE, 1966
be expected to yield different results if the coherence of the illumination varied. At high resolutions
a small variation in the scale of the coherence function can produce dramatic; changes in the image.
This may account, in part, for the difficulty encountered in intercalibrating instruments in different
laboratories, or in the cross-checking of microdensitometers that have essentially equivalent optical
components but produce different results in edge
trace analysis.
Since systems of this type are inherently nonlinear, it is impossible to characterize them by a
transfer function. This point is easily established by
taking the Fourier transform of both sides of (18).
Thus,
i~)
=
J i({})7*(~_ - Q){J r[~
K(~ - ~)K*(~)dqJdf1
- (~ + ~)]
v
v
/1
z,
0(.
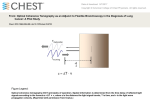
Figure 1.
Coordinate system.
The geometry is illustrated in Fig. 1, in which ~ is
the coordinate in object space, a is the coordinate in
the aperture plane, and x is the coordinate image
space. Assuming paraxial optics and ignoring
obliquity factors, we may express the rdation between object and "image" as follows (Beran and
Parrent,3 Chaps. 3 and 7):
fi(XI, X2) =
J JJJ rO(~I' ~2)R(al )R*(a2)
(19)
In (19) the inner integral is characteristic of the instrumentonly, while the factors t({3) and t* (Il - (3)
are determined solely from the object spectrum.
However, (19) is not in the form of "object spectrum
times transfer function equals image spectrum." The
inner integral has been referred to as a generalized
transfer function, but that nomenclature is rather
misleading since the function is not used as a transfer function at all. A better terminology is the more
cumbersome one introduced by Wolf, the "transmission cross coefficient," which emphasizes that it
is a function of two frequencies.
With these general reservations in mind, we may
direct our attention to the development of the system analysis for spatial filtering systems.
Here R (a) describes the transmission of the aperture
and all integrals are infinite. The term a~2 /2/ is, of
course, the saggital approximation and the r's remain from the Green's function.
Assuming coherent quasi-monochromatic radiation, we find that
rO(~1,6)
UO(~I)U~(~2)
(21)
= U i (XI)U1(X2)
(22)
=
and the image becomes
r i (XI,X2)
where
Ui(x) =
JJ Uo(~)R(a)e
ik ~U.a)- ~ +r(a.x)]
2/
SYSTEM ANALYSIS
In this section the relationships between "object"
and "image" for three cases of imaging with coherent radiation are derived. Denoting by ZI and Z2,
respectively, the object and image distances, we define these cases as follows:
d~da
(23)
f d K (~ - a)4
.
·
we may wnte
I gnonng terms 0 or er
Z3
r(~, a)
=
ZI
+
(~
_ a)2
(24)
2z1
and
l.~+~=~
ZI
2.
3.
Z2
ZI = Z2
ZI =
0,
(25)
/
=/
Z2 =
f
Condition (1) produces an image in the ordinary
sense only if the object is: in the near field of the
lens. Condition (2) yields an "image" which is the
Fourier transform of the object, and condition (3)
yields a Fourier transform multiplied by a quadratic
phase term.
Hence, omitting constant phase terms we may rewrite (23) as
. J R(a)e
L+ ~ a(X ~ ~ )]
[~ (~+ z.~ _/~) +2z,
2z. - ;;- z:
ik 2 z,
From the collection of the Computer History Museum (www.computerhistory.org)
·dad~
(26)
21
BASIC THEORY OF PARTIAL COHERENCE
I
Case (1):
Here an ideal lens is assumed again. Provided a, x,
and ~ and the condition
/
Under these conditions (26) becomes
U;(X)
=
J Uo(~) J
'k [r aE x'
R(a)e 2z,- z,-+ 2z. o
a2 »
ax]
z.-
da
J Uo(~)e
2aEl
2z,
k
d~ (27)
is met, the inner integral yields a constant C and
(37) becomes'
Consider first the integral
;k[r -
2/
;kEx
;ka'
d~
e -zz,- U(a)
=
(28)
Here
U;(x)
=
C J Uo(~)e -V d~
(39)
;k(E-a)'
U(a)
=
J Uo(~)e-2Z'-d~
(29)
Equations (28) and (29) are obtained by simply
completing the square in the exponent. We may
now write (27) as
Uj(x)
=
J R(a) U(a)e;kG:.- ::- ;:,J da
i.e., a Fourier transform with no quadratic phase
term.
Z1 = 0
Z2 = /
Under these conditions we have immediately
from Eq. (20)
Case (3):
(30)
Or completing the square again we have
ikx'
Ok .[Z'
Z~]
~+~
U;(x)
I X
J R(a) U(a)e
2z,
e
U;(x)
;kx'z,
e 2Jz.
da
;k(a+
J R(a) U(a)e
(31)
(32)
;k(a+z;x)"
ikx'z, f a
de¥.
2z1
-a U(a)e
(33)
Under the condition
(34)
i.e., object in near field of lens, the limits -a to a
(the aperture size) may be regarded as infinite and
(33) may be evaluated by the inversion theorem for
Fresnel transforms, giving
V,(x) - elk"g«,,<,) Vo (:: x)
(35)
that is, an image mUltiplied by a quadratic phase
term.
Case (2):
Zl
=
Z2
(40)
or
(41)
da
If the lens is unapodized and unaberrated, (32) becomes
U;(x) = e 2Jz.
ikax
= e 2T J Uo(a)R(a)e -21 da
;;-xr
2z,
(38)
or
Spatial filtering systems are properly constructed
around the configuration characteristics of case 2.
That is, this setup is used to display the Fourier
transform of the input transparency. A second
transparency is placed in the Fourier transform
plane to modify the spectrum. Then the process is
repeated and the "filtered" image is displayed in the
final Fourier transform plane.
In each spatial filtering experiment the coherence
conditions should be adjusted in accordance with
the foregoing analysis in order to be sure that the
approximations of the theory have been satisfied
and at the same time to minimize the degrading
effects associated with coherent imaging. These
effects arise primarily from the fact that such systems are nonlinear in intensity. Some examples of
these effects are shown below.
EXPERIMENTAL EXAMPLE OF
COHERENCE EFFECTS
=/
Under these conditions, (26) reduces to
Ui(x) =
J J Uo(~)R(a)e
;k(a' + E' +x' - 2a(x + E)l
2J
da d~
(36)
Completing the square on the exponent in (36) gives
U;(x) =
f
_lkEx I.a
Uo(~)e E-J
Ik(a-(x+E»)'
e
-a
2J
da d~
(37)
A simple experiment that illustrates the effects of
the spatial and temporal coherence is to form twobeam interference fringes by division of a wavefront.
Figure 2 shows the result of such an experiment.
Figure 2a shows high-contrast fringes formed with a
He-Ne gas laser illuminating a pair of small circular
From the collection of the Computer History Museum (www.computerhistory.org)
22
PROCEEDINGS-SPRING JOINT COMPUTER CONFERENCE, 1966
Figure 2.
a
b
c
d
Effect of coherence length. A and B-with gas lasers; C and D-with mercury arc.
apertures~ The envelope function is the diffraction
pattern of the single aperture. In Fig. 2b, a piece of
plane optical quality glass 0.5 mm thick was introduced in front of one of the apertures only, to add
an extra optical path. Again illuminating with the
He-Ne gas laser, we observe no difference in the
fringe contrast. However, when the experiment is
repeated with a coherent field produced by a
mercury arc lamp without the glass plate, highcontrast fringes are again seen (Fig. 2c), but with
the glass in place, the fringes disappear (Fig. 2d).
The slight scale change between the two pairs of
illustrations results from the different wavelengths
(6328 A for He-Ne and 5461 A for the Hg green
line). This illustration shows that the coherence
length of the mercury arc radiation is quite small.
Both fields were spatially coherent but the coherence
lengths were quite different.
Introducing fine
ground glass across the pair of pinholes resullts in
the intensity distribution of Fig. 3. The c!xtra paths
introduced by the ground glass did not exceed the
coherence length; hence, high-contrast fringes are
seen over the whole field. A discussion of these
types of speckle patterns in terms of their autocorrelation function and their power-sp,ectral density are to be found in a paper by Goldfischer. 4 An
attempt to build a coherent projection printer is reported by Milinowski,5 in which a rotating pi(~ce of
From the collection of the Computer History Museum (www.computerhistory.org)
BASIC THEORY OF PARTIAL COHERENCE
Figure 3.
Two-beam interference with diffusing plate.
ground glass is used to remove some of the coherence effects.
REFLECTED LIGHT
The different speckle patterns formed when coherent light is reflected from a rough surface have
been commented upon a number of times and perhaps form the most objectionable feature of coherent imaging by reflected light (as opposed to
transmitted light discussed in the last section).
Figure 4 shows a standard bar target that has been
printed on a matte photographic paper and then
Figure 5.
Figure4.
23
Photograph in reflected coherent light.
rephotographed in reflected coherent light. The
edge-ringing effects are masked by the speckle patterns. The speckling is produced by the interference
between the scattered light and is determined by
the coherence length of the incident radiation. Figure 5a is a photograph of a portion of a cementblock wall illuminated by a mercury arc so that the
light is spatially coherent. In Figure 5a the same
portion of the wall is illuminated by a gas laser; the
speckling completely obscures any structure of the
wall. Both beams had approximately the same
spatial coherence, but the gas laser has a considerable longer coherence length.
a
b
Effect of coherence length. A-spatially coherent only; B--spatially and temporally coherent.
From the collection of the Computer History Museum (www.computerhistory.org)
24
PROCEEDINGS-SPRING JOINT COMPUTER CONFERENCE, 1966
REFERENCES
1. E. Wolf, Proc. Roy. Soc., vol. (A) 230, p. 246
(1954).
2. M. Born and E. Wolf, Principles of Optics, 2nd
ed., Pergamon Press, New York, 1964.
3. M. Beran and G. B. Parrent, Theory of Partial
Coherence, Prentice-Hall, Englewood Cliffs, N.J.,
1963.
4. L. I. Goldfischer, J. Opt. Soc. Am". vol. 55,·
p. 247 (1965).
5. A. S. Milinowski, ibid, vol. 54, p. 1406 (1964).
From the collection of the Computer History Museum (www.computerhistory.org)