Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Power engineering wikipedia , lookup
Power inverter wikipedia , lookup
Stray voltage wikipedia , lookup
Electrical substation wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Current source wikipedia , lookup
Induction motor wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Voltage optimisation wikipedia , lookup
Mains electricity wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Power electronics wikipedia , lookup
Power MOSFET wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Alternating current wikipedia , lookup
Buck converter wikipedia , lookup
Stepper motor wikipedia , lookup
Pulse-width modulation wikipedia , lookup
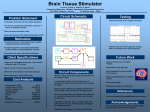
Lab 5: 555 Timer Applications (do either experiment A or B, both if you need “extra credit”) A. (intermediate problem) Pulse Width Modulation used to drive a DC gearhead motor Review before you start: o “Astable operation” reading on data sheet page 7-8 + figures 4, 5, 6 & 7. o The 555 circuit you built in lab 2 – in what 555 mode does this circuit operate (astable or stable)? A little experiment with motors before you begin… Get a gearhead motor. Use a lab power supply and run the motor at varying voltages, and record the current drawn by the motor (read from the power supply), and the rpm of the motor. Calculate the input power supplied to the motor (record current with no load and max load-near stall) . Finally find some SIMPLE method to gauge the maximum output power generated by the motor (you’ll have to “load” the motor in some fashion - describe your method). Use this table to record your results, and the space below to discuss how you measured key data. Input Current (no load on Current (max load voltage motor) on motor) 3 6 9 12 15 Notes on data collection methods: RPM (no load) Powerin Powerout From your table above you probably noted that as voltage drops, the RPM drops. Unfortunately, the output power also drops precipitously as you drop your input voltage. If you were using this motor to drive an electric car, for example, you certainly would like to drive the car at slow and fast speeds, but you would like a lot of power in both situations. How can you drive the car at low speed without sacrificing power? Why not try operating the motor at the maximum voltage, but only part of the time? For example, what if you powered the motor with the following waveform (the height of the square wave = the max operating voltage of your motor): Now you are operating the motor part of the time (perhaps a 30% duty cycle as show in the diagram above), but at the maximum voltage (and hopefully the maximum power/torque) during that time. Design Task: At home you should build the PWM Motor controller based on the astable 555 timer circuit on the reverse. Answer the questions on the reverse as well. Operate your circuit at 12 volts, and adjust the potentiometer to match the RPM in the table above. Then see if the output power has improved when using PWM to operate the motor at slow speeds. Record your results in a table and include with your lab. Be sure to use an oscilloscope to observe and sketch the waveforms from a key node (which?) of your circuit. Did the results match your calculations?? Also be sure to monitor the current being drawn by the motor and the temperature of the 555. Are you over-driving the 555? Demonstrate the completed circuit to us! Results & Conclusions: Draw the circuit diagram on a separate sheet of paper and show your supporting calculations and answers to the questions and show on that page. Write a separate one page (max) summary of your important results and conclusions. Be sure to discuss how well circuit worked? Did the 555’s overheat? If so, why? If not, what prevented this from happening? Lab 5 Part A– Using Pulse Width Modulation to control the speed of a motor Build this circuit! Use oscilloscope on pin 3 before & while you drive a motor! RA = 1000 Ω RB = 100 KΩ (potentiometer) Motor wires connect to MOTOR-1&2 Questions to ponder (discussion topics!) 1. What is PWM? Why useful? 2. What path will current follow when charging the capacitor (use top diagram)? Discharging (use bottom diagram)? 3. Note that the potentiometer divides the 100K RB into “two adjustable pieces” – let’s call the left and right “pieces” RB1 and RB2, respectively. RB1 + RB2 = _________? 4. Wouldn’t it be simpler to use an astable circuit with a potentiometer for either RA or RB (no diodes)? Wouldn’t this simply vary the ON time of the periodic pulse train? Look at the equations on page 8 (repeated below), and explain why this isn’t a great solution (use your analytical math skills!) What are max & min duty cycles? What happens to period? ton 0.693( RA RB )C (while C is charging) toff 0.693( RB )C (while C is discharging) Period T ton toff 0.693( RA 2 RB )C 5. You can adjust the potentiometer in the suggested circuit at right to different values. Calculate ton, toff, duty cycle, period, and frequency for RB1= 0, 20, 40, 60, and 80 k. Make a table & show sample calculations for one row). Use Excel?? Compare results to #4. 6. Do you think the PWM control will be as effective if you use a much longer period? What about much smaller? How could you quickly check this experimentally? 7. Why is the MOSFET necessary? Quick Diode Overview (see useful links & Chap 16-7) A diode will is a “one way gate” for current. Reverse Biased: Anode to Cathode voltage < 0V Not current flows (acts like open circuit) - Current (e-) flows + VBIAS > +0.7V VS + VS - + Transistors are devices used to: amplify a small signal into a larger one (e.g., whisper into microphone load voice out of speaker) use a tiny (low power) input signal to create a large change in current at the output (e.g., amplifier effectively creates an “electronic switch,” allowing you to use low power electronics to drive power hungry motors, etc.) Basic operation: (devices below are “N type” – “P type” arrows are opposite, and IBASE and VGATE opposite). BJTs: Tiny base current (IBASE in direction shown) enables large current to flow thru collector-emitter terminals. FETs: Positive gate voltage (VG) enables large current flow through Drain-Source terminals. (Enhanced) Metal Oxide Semiconductor NO Current (e-) flows! Reverse Bias Forward Bias VBIAS < 0 (Anode to Cathode) Forward Biased: Anode to Cathode voltage > 0.7V Current can flow freely (acts like a wire or short ckt.) + Transistor Quick Overview (see useful links & Chap 18) Bipolar Junction Transistor (BJT) Field Effect Transistor (MOSFET) (NPN) (N-channel) Collector (C) A typical silicon diode has a forward bias voltage drop of 0.7 V (germanium 0.3V). The 1N4148 “small signal diode” can only handle 100 mA, while the 1N4004 “rectifying diode” can handle 1A. See data sheets! Light Emitting Diodes (LEDs) typically have a voltage drop of ~2V when forward biased, and should be operated in the 15 – 20 mA range. Base (B) Drain (D) Gate (G) IBASE VGATE Emitter (E) Source (S) Lab 5: 555 Timer Applications (do either experiment A or B, both if you need “extra credit”) B. (Advanced problem) Pulse Width Modulator -- using it to drive a servo motor Review before you start: o “Monostable operation” reading on data sheet page 7 + figures 1, 2, & 3. o “Astable operation” reading on data sheet page 7-8 + figures 4, 5, 6 & 7. o “Pulse width modulator” reading on data sheet page 8-9 + figures 8 & 9. o Review the notes on how a servo motor works, what the operating voltage is, and in particular you will attempt to create a circuit that replicates this waveform: Design Task: Create a circuit to generate a train of pulses that have a fixed period of 20 ms, but have a variable “ON” pulse width of 1000 μs to 2000 μs. As you will recall from the robotics course, this is the signal needed to drive a digital servo motor (which you will do). After you have breadboarded and tested the circuit on the oscilloscope, use it to drive a servo motor (connect output to white wire of servo motor, and red wire to +6V, black to ground). Demonstrate the completed circuit to us! Monitor the temperature of the 555’s. Hints on designing the circuit: 1. For this ciruit you actually use one 555 timer circuit operating in the astable mode as the trigger input for a monostable circuit (i.e., output pin of astable 555 circuit goes to trigger pin of monostable circuit. 2. Start by designing an astable triggering circuit that has a period of 20 ms. The trigger input for a monostable “one shot” circuit is a low pulse, and that pulse needs to be shorter than the minimum pulse shown in the diagram the right diagram above. Your periodic triggering pulse train would look something like this: 3. The monostable circuit will generate the “variable width” pulse that you will use to control the servo motor. By varying the voltage at pin 5 (“modulating input), the width of the output pulse will vary (“be modulated”). Note that you will select values of to get a “starting” pulse width which will then be modulated by the varying voltage at Pin 5. See your results from monostable circuit to select a “starting pulse width” using pins RA and C. Results & Conclusions: Draw your circuit diagram on a separate sheet of paper and show your supporting calculations & analysis on that page. Write a one page (max) summary of your results and conclusions. How well did your circuit work? Did the 555’s overheat? If not, why not? If so, any ideas how you could prevent this from happening? Design Ideas for Lab 5 Part B– Using Pulse Width Modulation (PWM) to control a servo motor Connecting the servo (red/black/white wires) White: connects to the pulse signal from your circuit can be driven (requires very little current) Red: + Voltage – don’t exceed the maximum servo rating – see robotics wiki lecture notes! Black: Ground (0V) You need to design and breadboard a circuit that create a periodic train of pulses (with a fixed period of 20 ms), but you want to vary the pulse width from 1 ms to 2 ms, as shown in the diagrams below. The length of the pulse will control the servo’s position! Question: Why not use a simple astable circuit, with a potentiometer + resistor for either RA or RB, and simply vary the on time of the periodic pulse train? Look at the equations on page 8 (repeated below), and explain why this won’t work (use your analytical math skills!) Include this in your discussion! ton 0.693( RA RB )C Period T ton toff 0.693( RA 2 RB )C toff 0.693( RB )C In the 555 data sheet page 8, “Pulse Width Modulator” application, read the key hint: “when the timer is connected in the monostable mode and triggered by a continuous pulse train…” a. You know how to create a continuous pulse train (lab 2, and page 7/8 of 555 data sheet)…set up an astable 555 circuit! What period and on/off times do you need? b. You know how to create a variable length single pulse…set up a monostable 555 with a potentiometer as you did for Part IIA…what range of single pulse widths do you need? c. Now simply use the pulse train from the astable circuit to trigger input for the monstable circuit! Astable Circuit Monostable Circuit output = train of variable-width pulses! Trigger periodic train, what widths to use??? variable width Additional Bonus: Note that the “Pulse Width Modulator” application gives you another method to control the pulse width—you can vary the voltage on Pin 5 (Control Voltage Pin). After you get the circuit above up and running with a potentiometer, try using a photoresistor to create a variable voltage at pin 5! Discuss your results— how might this be useful?