Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Quantum field theory wikipedia , lookup
Measurement in quantum mechanics wikipedia , lookup
Quantum dot wikipedia , lookup
Bell's theorem wikipedia , lookup
Coherent states wikipedia , lookup
Scalar field theory wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Hydrogen atom wikipedia , lookup
Quantum entanglement wikipedia , lookup
Algorithmic cooling wikipedia , lookup
X-ray fluorescence wikipedia , lookup
Quantum fiction wikipedia , lookup
Particle in a box wikipedia , lookup
Many-worlds interpretation wikipedia , lookup
Path integral formulation wikipedia , lookup
Orchestrated objective reduction wikipedia , lookup
EPR paradox wikipedia , lookup
Interpretations of quantum mechanics wikipedia , lookup
History of quantum field theory wikipedia , lookup
Quantum group wikipedia , lookup
Quantum computing wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
Quantum key distribution wikipedia , lookup
Quantum state wikipedia , lookup
Quantum machine learning wikipedia , lookup
Hidden variable theory wikipedia , lookup
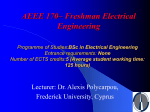
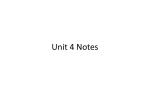
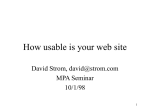
Guidance Applied to Quantum Operations in Josephson Charge Qubits Charles D. Hill, Jason F. Ralph, Elias J. Griffith Department of Electrical Engineering and Electronics, Brownlow Hill, Liverpool, L69 3GJ, United Kingdom. [email protected] Abstract. In this paper we present an adaptation of classical guidance laws to quantum operations. One such guidance technique which has proved particularly useful in classical systems is proportional navigation. Despite the fact that proportional navigation controls are not optimal, controls based on these methods are often simpler, easier to implement and have a lower bandwidth than those corresponding to optimal controls. We consider the use of proportional navigation laws for quantum control. These techniques have previously been considered for single qubit state preparation but not for qubit gate operations [1]. This paper extends these techniques, showing how classical proportional navigation can be applied to the problem of implementing quantum operations using examples drawn from solid-state Josephson charge qubits. 1. Introduction The coherent operation and control of quantum mechanical systems is typically controlled by the application of classical external bias fields. These fields are subject to noise which will then couple to the system, limiting the coherence of the quantum mechanical system. In a classical system, a closed control loop is often used reduce the unwanted effects of noise. Closed loop control compares the desired state of the system with the measured state of the system and minimises the error between the two. In a quantum mechanical system, this is problematic because measurement inevitably causes a back action on the system being measured. Nevertheless, several groups have proposed protocols based on weak measurement which minimize the adverse effects of the back action on the system, while still providing a measurement record suitable for feedback [2,3]. In this paper we generalize a classical guidance technique to a quantum mechanical system. We show how it is possible to use guidance techniques to find the classical bias fields for the implementation of a given quantum operation for a superconducting charge qubit. Although the method we consider here is an example of open loop control, one of its principle advantages is that the method easily generalises to feedback. This is because the guidance technique which we use to find the controls is much simpler, and faster, than corresponding optimal control methods. For many applications it would be impractical to recalculate an optimal pulse shape in response to feedback. With the simpler guidance methods adapting to feedback becomes more feasible. So, although guidance techniques are not time optimal, they offer significant advantages. This paper is organised as follows. Section 2 describes proportional navigation, and gives a method for finding the quantum mechanical analogue. Following this prescription it is comparatively simple to find the bias controls which implement a given unitary gate in a specified time. In Section 3 we consider the application of quantum guidance, and demonstrate how these techniques can be applied to a model superconducting charge qubit. Finally, conclusions are made in Section 4. 2. Proportional Navigation Guidance Proportional navigation is a control technique that ensures that a specified target state is reached at a specified time. As the system evolves there is always an error between the desired evolution and the actual evolution. Controls are applied to reduce the distance between desired evolution and the actual evolution. In proportional navigation the controls applied are proportional to the Zero Effort Miss (ZEM), a measure of the ‘distance’ the system would miss the target state by if no controls were applied. The most general form of classical proportional navigation is: ac N ' ( ZEM ) 2 t go where ac is the acceleration required or ‘commanded’, N’ is a constant known as the navigation constant and typically chosen between 4 and 8. ZEM is the Zero Effort Miss. The controls are moderated by 1/tgo2 where tgo is the time to go until the end of the operation. Classically proportional navigation is not time optimal, but does have some desirable features which has lead to its widespread use in classical systems. Several of the important features of proportional navigation (in any context, classical or quantum) can be seen in the Figure 1. At time t, we find ourselves in the state U(t). If no controls are applied the system will evolve from the current state, U(t), to the state UEnd. The ZEM is a measure of distance between UEnd and the intended objective, UObjective. Controls are applied to the system to minimize the ZEM. In proportional navigation, the controls are proportional to the Zero Effort Miss. Up until this point the states, U, could have referred to any state, quantum or classical. From now on we will consider a particular case: that each state U refers to a particular unitary operation. Figure 1: Schematic diagram showing the essential features of proportional navigation. We now show how it is possible to adapt proportional navigation to the problem of implementing a given quantum operation, UObjective. In adapting the classical guidance algorithm to the quantum mechanical setting, we have to keep in mind that operations do not commute. Applying no controls, we reach the operation, U End U 0 (t go ) U (t ) where U0 is the natural evolution of the system (with no controls applied). That is iH t U 0 exp 0 , where H0 is the Hamiltonian of the system when no controls are applied. The † operation which characterises the ZEM is given by the unitary operator, U ZEM U ObjectiveU End . Because operations do not commute, we have to retrodict operations from the end of the evolution, to find the correct controls to apply now, rather than at the end of the operation. That is, U now U 0† U ZEM U 0 If it were possible to instantly apply Unow instantaneously, then no more controls would need to be applied to reach the objective because, U Objective U 0 (t go ) U now However, since it is not possible in many practical situations to apply arbitrarily strong and instantaneous controls we must cancel the error signal, given by Unow, over a period of time. We now adapt proportional navigation to the quantum mechanical regime to specify a particularly simple and effective way of canceling the error, Unow. This gradual cancellation of errors is one of the most appealing aspects of proportional guidance, because controls are applied gradually over a period of the bandwidth of the controls tends to be low and the controls tend to be small immediately before reaching the objective. Proportional navigation can be adapted to quantum mechanics by using three steps. These are: 1. Parameterise the operation according to angles of rotation. For one qubit this is, i Tr i log( U now ) i 2 2. Attempt to apply the control Hamiltonian given by the quantum analogue of classical proportional navigation: H i N ' i t go 3. Repeat for each time-step. Using these three steps it is often possible to find controls which reach the given target state, UObjective, for a large number of practical situations. We did not assume typically applied controls before we started, such as resonant fields, but find that these controls are found as a result of the simple guidance law given in step 2. This quantum guidance law differs as it is proportional to 1/tgo, and not 1/tgo2 as it is in the classical case. That change is because controls applied to the Hamiltonian affect first order (in time) angular precession frequencies directly, rather than accelerations as the controls do in the classical case. 3. Application to a model charge qubit We now demonstrate quantum guidance as it could be applied to an idealised model for a standard experimental configuration of the superconducting charge qubit. This qubit consists of a single superconducting island coupled to external circuitry via two Josephson junctions (see Figure 2). The control fields which can be applied to this system are a voltage bias, Vx, and an external flux, Φx. The two Josephson junctions form a loop. The flux through the loop, Φx, modulates the rate of electron pairs tunnelling onto and off the superconducting island. For simplicity, in our idealised system, we have assumed that both Josephson junctions are identical. With this model in place, we wish to see how proportional navigation can be used to find a given unitary operation of the charge qubit state, where the basis states are given by no excess electron pairs (|0) or one excess pair (|1) on the Cooper pair box. Figure 2: Circuit diagram of a single Josephson charge qubit. Figure 3: Energy level diagram, showing the variation in energy levels at different voltage biases, and Φx=(0.25±0.05)Φ0. Typical values in this idealized qubit were taken to match experiment, in particular those values found in References [4, 5]. Figure 2 shows a schematic diagram of a qubit circuit, with total capacitance C = C1+C2, a bias voltage of Vx and a flux of Φx. Typical values are used for this paper are: C = 6×1016 F, ν/2π=12.9GHz, Φx=0.25Φ0 ±0.05Φ0, where Φ0=2×1015Wb, and Vx=(0.1 ± 0.04) × 2e/C. For the purposes of this paper, we limit the variation available in each control as indicated. We do this for practical reasons. For example, if the voltage bias becomes too large, then we will begin to excite higher excited states, leading to leakage errors and so the voltage bias must be limited to prevent this. Another criterion that we would like to satisfy is to keep the strength of the control linear in the control field, which limits the variations which we can apply to the flux. When these limits are applied we can limit ourselves to considering just two available states. When limited to just two states, the Hamiltonian of the charge qubit may be written as CVx2 e 2 π x h I eVx z x H 0 cos 2 2 C 2 0 where σx and σz are the Pauli sigma matrices, and typical values for each of the experimental parameters is given above. The corresponding energy level diagram is shown in Figure 3. The first term in the Hamiltonian corresponds to a global phase, and can safely be ignored in the one qubit case. The second term represents an electrostatic energy splitting of the energy levels proportional to the applied external voltage. The third term corresponds to tunneling on and off the island, and can be modulated by application of flux through the loop formed by the two Josephson junctions. This gives us two external controls which affect the evolution of the charge qubit. By applying time dependant pulses to these two controls (or indeed either one) it is possible to perform every possible rotation of a single qubit. In this paper we will consider an operation which cannot be applied directly, but for which we require time dependant controls – a rotation by π around the y-axis. In order to implement proportional navigation we would like to find the desired controls we make updating the controls relatively simple. To do this, we use a linear approximation: 2H x π sin π x 0 H V x z e x If we keep within the limits which we have specified for the flux and voltage controls, then this approximation is valid. Using the linear approximation, and steps 1 and 2 of the proportional navigation prescription, we can find the controls which should be applied to the qubit required to implement a given single qubit rotation. The controls which are obtained for a rotation by π around the y-axis are shown in Figure 4. (a) (b) Figure 4: These diagrams show (a) the controls which should be applied using proportional navigation, and (b) the corresponding Zero Effort Miss. Figure 4 shows the controls and zero effort miss calculated using proportional navigation for the implementation of a rotation by π around the y-axis for a superconducting charge qubit. These pulses are typical of the pulses found when using proportional navigation to implement a quantum operation. Even though it is not possible to rotate around the y-axis directly, it is possible to create a Y operation by using time varying flux and voltage biases. Figure 4(a), the controls shows that the controls can saturate, when the correction which needs to be made is large, but as the evolution continues, the angle which needs to be corrected dies away (as is shown in Figure 4(b)) and therefore so do the corresponding controls. This is a feature typical of proportional navigation. Controls die away towards the end of the evolution. This means that as we finish applying a given operation, we do not need to make abrupt changes in the strength of the control fields, and potentially populating higher energy excited states. One advantage of proportional navigation is that it leads to a stationary Hamiltonian towards the end of the evolution. In order to compare the two methods, the corresponding optimal control pulse, found using gradient ascent methods [6, 7], enforcing similar limits on the controls which we imposed on the proportional navigation controls. The optimal control takes 200ps while the proportional navigation controls nominally take 750ps. Without these constraints optimal pulses can be as short as 40ps. However the proportional navigation controls can be easily adapted, whereas the optimal controls can take some time to calculate. Proportional navigation techniques can be made comparatively robust against low bandwidth constraints, because they can be easily adapted to feedback. In Figure 5, a first order time delay has been added to the system: f (t ) f (t ) * exp( t / ) The dotted and dot-dashed lines show the trace fidelity of the operation for proportional navigation and optimal methods when no correction is applied. The optimal pulse scheme marginally outperforms the proportional navigation algorithm. In contrast both are outperformed by the solid line which shows the fidelity of the proportional navigation pulse when the pulse uses feedback to compensate for the imperfect pulses applied to the system if we had perfect knowledge of the actually applied pulses. Using this method, proportional navigation could, in principle, compensate for time constants as large as 8ps. If the optimal pulse or guidance pulse is naively used the fidelity drops off almost immediately. Figure 5: The effect of adding a first order time delay to the optimal, and proportional navigation techniques. There are several advantages to using proportional navigation. It is a much simpler method than finding optimal pulses. Controls die away towards the end of the evolution, leading to a stationary Hamiltonian at the end of each pulse sequence, and it easily generalises to feedback. Some disadvantages of the method are that it is not optimal – faster controls are possible at the expense of complexity, and it requires shaped pulses. 4. Conclusion In this paper we have adapted classical guidance techniques to apply to quantum operations. A prescription was given for the quantum analogue to proportional navigation, and we showed how quantum guidance could be applied to an idealized superconducting charge qubit to implement a given quantum operation (in this paper we considered the Y operation). Whereas these pulses are not as fast as the corresponding optimal pulse shapes (which we explicitly found), they are much simpler, easier to find and adapt and in many cases they may prove sufficient. These pulses can adapt to low bandwidth situations, and easily generalize to a feedback situation. In practise, these control methods have proven useful in the classical regime, and there is reason to believe that they would be equally useful in the quantum regime. Acknowledgments CH and JFR would like to acknowledge the support of an ESPRC grant: EP/C012674/1. EJG would like to acknowledge the support of the Department of Electrical Engineering and Electronics, and a University of Liverpool research scholarship. References [1] Ralph, Griffith, Clark, Everitt, ‘Guidance in a Josephson Charge Qubit’, Physical Review B, 70, 214521 (2004). [2] V.P.Belavkin, Rep. Math. Phys. 45, 353 (1999). [3] A.C.Doherty, K.Jacobs, ‘Feedback control of quantum systems using continuous stateestimation’, Proc. 39th IEEE Conf. on Decision and Control, p.949 (2000) [4] Pashkin, Yamamoto, Astafiev, Nakamura, Averin, & Tsai, ‘Quantum oscillations in two coupled charge qubits', Nature 421 (6925), 823—826, (2003). [5] Yamamoto, Pashkin, Astafiev, Nakamura, & Tsai, 'Demonstration of conditional gate operation using superconducting charge qubits', Nature 425 (6961), 941—944, (2003). [6] Khaneja, Reiss, Kehlet, Schulte-Herbruggen, Glaser, ‘Optimal control of coupled spin dynamics: design of NMR pulse sequences by gradient ascent algorithms’, Journal of Magnetic Resonance, 172, 296-305, (2005) [7] Spoerl, Schulte-Herbrueggen, Glaser, Bergholm, Storcz, Ferber, Wilhelm, ‘Optimal Control of Coupled Josephson Qubits’, quant-ph/0504202, (2005).