
Intelligent Distributed Agent Based Architecture
... The new approach to coordination was inspired by social networks, as observed in higher mammalian societies. Two social relationships were explored, namely kinship and trust. Coordination is achieved through team selection. Using characteristics of social networks, such as learning and the ability t ...
... The new approach to coordination was inspired by social networks, as observed in higher mammalian societies. Two social relationships were explored, namely kinship and trust. Coordination is achieved through team selection. Using characteristics of social networks, such as learning and the ability t ...

Zachary Dodds Associate Professor of Computer Science Harvey
... [NSF proposal] Uncommon Robotic Simulation for the Common Computer Science Major – I was a co-PI to PI Frank Klassner of Villanova University on this NSF DUE CCLI Phase 2 proposal submitted January 15, 2009, which was a resubmit from 2008! Total requested funds were $457,916. [NIH proposal] Along wi ...
... [NSF proposal] Uncommon Robotic Simulation for the Common Computer Science Major – I was a co-PI to PI Frank Klassner of Villanova University on this NSF DUE CCLI Phase 2 proposal submitted January 15, 2009, which was a resubmit from 2008! Total requested funds were $457,916. [NIH proposal] Along wi ...
How mobile robots can self-organise a vocabulary
... meaning. As physical symbol grounding can in principle be achieved by individual agents, the ability to develop a shared symbolic communication system is a (much) harder challenge. This challenge, which I have called social symbol grounding (Vogt & Divina 2007), has remained my primary research focu ...
... meaning. As physical symbol grounding can in principle be achieved by individual agents, the ability to develop a shared symbolic communication system is a (much) harder challenge. This challenge, which I have called social symbol grounding (Vogt & Divina 2007), has remained my primary research focu ...
ppt
... What lessons for robots from these alternative views? At first sight, they are negative and unhelpful ! For everyday robot actions this implies we should do without planning, without the computational model, without internal representations ... .... but what should we do instead ? Non-Symbolic AI le ...
... What lessons for robots from these alternative views? At first sight, they are negative and unhelpful ! For everyday robot actions this implies we should do without planning, without the computational model, without internal representations ... .... but what should we do instead ? Non-Symbolic AI le ...

Disrupted Narratives: O`Connor`s Feminine Grotesque
... O’Connor’s sense of humor, taken traditionally as characteristic of the grotesque writing, is to me an indication of the feminine ruse, a trick that O’Connor the writer/trickster plays on her narrator.5 O’Connor’s resistance to the “sugaring” of the patriarchal, usually disguised as sarcastic humor ...
... O’Connor’s sense of humor, taken traditionally as characteristic of the grotesque writing, is to me an indication of the feminine ruse, a trick that O’Connor the writer/trickster plays on her narrator.5 O’Connor’s resistance to the “sugaring” of the patriarchal, usually disguised as sarcastic humor ...

From Natural Language to Soft Computing: New Paradigms
... by Dr. Dan Tufiş - director of Institute of Artificial Intelligence of Romanian Academy and Dr. Ioan Dziţac - Agora University of Oradea, and was addressed to the 30 participants, from Romania and other 6 countries, selected from over 100 participants at ICCCC 2008: scientific researchers, PhD and ...
... by Dr. Dan Tufiş - director of Institute of Artificial Intelligence of Romanian Academy and Dr. Ioan Dziţac - Agora University of Oradea, and was addressed to the 30 participants, from Romania and other 6 countries, selected from over 100 participants at ICCCC 2008: scientific researchers, PhD and ...

word office version - European Parliament
... implement them in the outside world, independently of external control or influence; whereas this autonomy is of a purely technological nature and its degree depends on how sophisticated a robot's interaction with its environment has been designed to be; AB. whereas the more autonomous robots are, t ...
... implement them in the outside world, independently of external control or influence; whereas this autonomy is of a purely technological nature and its degree depends on how sophisticated a robot's interaction with its environment has been designed to be; AB. whereas the more autonomous robots are, t ...

Execution monitoring in robotics: A survey
... is a general model for crossing any door between two rooms. The main drawback of this method is the lack of robustness, since full observability of the robot’s state is assumed. A similar approach to PLANEX is presented in [18]. Faults are detected by comparing the current state with the model of th ...
... is a general model for crossing any door between two rooms. The main drawback of this method is the lack of robustness, since full observability of the robot’s state is assumed. A similar approach to PLANEX is presented in [18]. Faults are detected by comparing the current state with the model of th ...
Cyberbotics` Robot Curriculum
... machine qualifies for artificial intelligence relatively to an observer. The test consists in a simple setup where the observer is facing a machine. The machine could be a computer or a robot, it does not matter. The machine however, should have the possibility to be remote controlled by a human bei ...
... machine qualifies for artificial intelligence relatively to an observer. The test consists in a simple setup where the observer is facing a machine. The machine could be a computer or a robot, it does not matter. The machine however, should have the possibility to be remote controlled by a human bei ...
Lego Mindstorms NXT 2.0 - hanan-salah
... Over reliance on AI - as you may have seen in many films such as The Matrix, iRobot or even kids films such as WALL.E, if we rely on machines to do almost everything for us we become very dependent, so much so they have the potential to ruin our lives if something were to go wrong. Although the film ...
... Over reliance on AI - as you may have seen in many films such as The Matrix, iRobot or even kids films such as WALL.E, if we rely on machines to do almost everything for us we become very dependent, so much so they have the potential to ruin our lives if something were to go wrong. Although the film ...
Humanoid Robots That Behave, Speak, and Think Like Humans: A
... 1) The human brain relates, correlates, prioritizes and remembers sensory input data. Similarly, to achieve human-like intelligence, relating, correlating, prioritizing and remembering input patterns must be the essential analysis tool of the robotic controller. The RRC, a proprietary robotic contro ...
... 1) The human brain relates, correlates, prioritizes and remembers sensory input data. Similarly, to achieve human-like intelligence, relating, correlating, prioritizing and remembering input patterns must be the essential analysis tool of the robotic controller. The RRC, a proprietary robotic contro ...
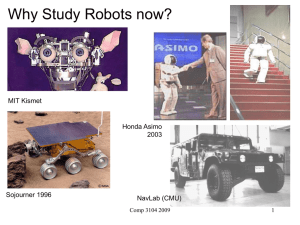
Robot Control Paradigms Intelligent Mobile Robotics CS 490 Fall 2002
... – The robot must be able to handle unexpected events. – The usual state of affairs Derived from slides by Jerry Weinberg: http://www.cs.siue.edu/classes/Fall%202002/CS/CS490-CIS588/Weinberg/Lectures/ ...
... – The robot must be able to handle unexpected events. – The usual state of affairs Derived from slides by Jerry Weinberg: http://www.cs.siue.edu/classes/Fall%202002/CS/CS490-CIS588/Weinberg/Lectures/ ...
Robotics - Krupa Vara Prasad Adimulapu
... an effect.Thus the "hands" of a robot are often referred to as end effectors, while the "arm" is referred to as a manipulator. Most robot arms have replaceable effectors, each allowing them to perform some small range of tasks. Some have a fixed manipulator which cannot be replaced, while a few have ...
... an effect.Thus the "hands" of a robot are often referred to as end effectors, while the "arm" is referred to as a manipulator. Most robot arms have replaceable effectors, each allowing them to perform some small range of tasks. Some have a fixed manipulator which cannot be replaced, while a few have ...

machine ethics and robot ethics
... not limited to) information technology, genomics, biotechnology, synthetic biology, nanotechnology, personalized medicine, stem cell and regenerative medicine, neuroscience, robotics, and geoengineering. The societal and ethical issues, which arise within those fields, go beyond safety and tradition ...
... not limited to) information technology, genomics, biotechnology, synthetic biology, nanotechnology, personalized medicine, stem cell and regenerative medicine, neuroscience, robotics, and geoengineering. The societal and ethical issues, which arise within those fields, go beyond safety and tradition ...

Lebeltel2000
... propositions. As such, it is a new variable5. Of course, the conjunction of n variables is also a variable and, as such, it may be renamed at any time and considered as a unique variable in the sequel. Probability To be able to deal with uncertainty, we will attach probabilities to propositions. We ...
... propositions. As such, it is a new variable5. Of course, the conjunction of n variables is also a variable and, as such, it may be renamed at any time and considered as a unique variable in the sequel. Probability To be able to deal with uncertainty, we will attach probabilities to propositions. We ...
eref Saglroglu Intelligent Systems Research Group, Contra
... the control difficult such as when a model of the system is not available, the system may change with time, or the controller itself may change with time due to component failures. Use of neural networks in robot control offers a new p~omising direction for solving some of the most difficult control ...
... the control difficult such as when a model of the system is not available, the system may change with time, or the controller itself may change with time due to component failures. Use of neural networks in robot control offers a new p~omising direction for solving some of the most difficult control ...

Inferring Robot Actions from Verbal Commands Using Shallow
... to construct a grammar that facilitates incremental analysis such that robots can act pro-actively already during a verbal command is given. The present work is similar to the once mentioned above in the aim to interpret natural language sentences by mapping sentences to expected robot actions. Howe ...
... to construct a grammar that facilitates incremental analysis such that robots can act pro-actively already during a verbal command is given. The present work is similar to the once mentioned above in the aim to interpret natural language sentences by mapping sentences to expected robot actions. Howe ...
Robotics
... In a robot society, (mobile) robots enter our daily living space (move out of the factory). ...
... In a robot society, (mobile) robots enter our daily living space (move out of the factory). ...
Planning in a Hierarchy of Abstraction Spaces*
... search tree in the higher space, representing a skeleton plan. When a new problem is posed to ABSTRIPS, the external interface program sets the preconditions of a dummy operator to the goal wiT. The domain's maximum criticality, which was determined when criticalities were assigned, is retrieved. Th ...
... search tree in the higher space, representing a skeleton plan. When a new problem is posed to ABSTRIPS, the external interface program sets the preconditions of a dummy operator to the goal wiT. The domain's maximum criticality, which was determined when criticalities were assigned, is retrieved. Th ...

38. Behavior-Based Systems - Server users.dimi.uniud.it
... with the robot’s immediate needs, such as moving while avoiding obstacles, and thus operates on a very fast time scale and uses direct external sensory data and signals. In contrast, the deliberative component uses highly abstracted, symbolic, internal representations of the world, and operates on t ...
... with the robot’s immediate needs, such as moving while avoiding obstacles, and thus operates on a very fast time scale and uses direct external sensory data and signals. In contrast, the deliberative component uses highly abstracted, symbolic, internal representations of the world, and operates on t ...
Robotic-fall05-4 - Computer Engineering
... Insects with more than 6 legs (e.g., centipedes and millipedes), use the ripple gate Insects can also run very fast by letting go of the ground completely every once in a while, and going ...
... Insects with more than 6 legs (e.g., centipedes and millipedes), use the ripple gate Insects can also run very fast by letting go of the ground completely every once in a while, and going ...

Intelligence Without Reason
... the systems and in building the world models. Relatively little computation was used in planning and acting. An important effect of this work was to provide a framework within which other researchers could operate without testing their ideas on real robots, and even without having any access to real ...
... the systems and in building the world models. Relatively little computation was used in planning and acting. An important effect of this work was to provide a framework within which other researchers could operate without testing their ideas on real robots, and even without having any access to real ...
AAAI Proceedings Template - Electronics and Computer Science
... unconscious, just as it would be in any of today's robots. The only difference would be that I can eventually wake up, or recover from the coma, and feel again, and even feel what it's like to hear and believe that I had been in a coma and that my fist had been clenched while I was in the coma (so ...
... unconscious, just as it would be in any of today's robots. The only difference would be that I can eventually wake up, or recover from the coma, and feel again, and even feel what it's like to hear and believe that I had been in a coma and that my fist had been clenched while I was in the coma (so ...

Cooperative Mobile Robotics
... Modeling the intentions, beliefs, actions, capabilities, and states of other agents can lead to more effective cooperation between robots. Communications requirements can also be lowered if each agent has the capability to model other agents. Note that the modeling of other agents entails more than ...
... Modeling the intentions, beliefs, actions, capabilities, and states of other agents can lead to more effective cooperation between robots. Communications requirements can also be lowered if each agent has the capability to model other agents. Note that the modeling of other agents entails more than ...