State Space Construction by Attention Control
... the sensory data. Therefore, it is necessary to perform a kind of dimensionality reduction to reduce the size of the sensory data. However, our policy in this research approach is that the robot has no access to models based on human intuitions for segmenting features, such as lines, color regions, ...
... the sensory data. Therefore, it is necessary to perform a kind of dimensionality reduction to reduce the size of the sensory data. However, our policy in this research approach is that the robot has no access to models based on human intuitions for segmenting features, such as lines, color regions, ...

Applied ontologies and standards for service robots
... • Ontology is A description of the knowledge in a particular field and divided into categories represent concepts and each concept of the characteristics and attributes This concept has been used in a wide applications in artificial intelligence including intelligent robotics and software and the Se ...
... • Ontology is A description of the knowledge in a particular field and divided into categories represent concepts and each concept of the characteristics and attributes This concept has been used in a wide applications in artificial intelligence including intelligent robotics and software and the Se ...

A Hierarchy of Reactive Behaviors Handles Complexity
... The “behavior based” approach has proven useful for real time control of mobile robots. Here, the actions of an agent are derived directly from sensory input without requiring an explicit symbolic model of the world [4,5,9]. In 1992, the programming language PDL was developed by Steels and Vertommen ...
... The “behavior based” approach has proven useful for real time control of mobile robots. Here, the actions of an agent are derived directly from sensory input without requiring an explicit symbolic model of the world [4,5,9]. In 1992, the programming language PDL was developed by Steels and Vertommen ...
Intelligence without representation* Rodney A. Brooks
... representations are completely misleading and quite different from what we really use. 3.1. A continuing story Meanwhile our friends in the 1890s are busy at work on their AF machine. They have come to agree that the project is too big to be worked on as a single entity and that they will need to be ...
... representations are completely misleading and quite different from what we really use. 3.1. A continuing story Meanwhile our friends in the 1890s are busy at work on their AF machine. They have come to agree that the project is too big to be worked on as a single entity and that they will need to be ...
Syddansk Universitet The Issue of Moral Consideration in
... pair with hypotheses, which can be proved or verified ([19]: xlii). Obviously, there are shades of pragmatism in Vaihinger’s work on the philosophy of as if. But we are not dealing with the pragmatic conception, which implies that what is useful to believe is true, since here “useful to believe” may ...
... pair with hypotheses, which can be proved or verified ([19]: xlii). Obviously, there are shades of pragmatism in Vaihinger’s work on the philosophy of as if. But we are not dealing with the pragmatic conception, which implies that what is useful to believe is true, since here “useful to believe” may ...

The Frankenstein Complex and Asimov`s Three Laws
... What good, then, are even the revised laws if they cannot be directly put into practice? Luckily, our robots do not need the laws in English and will not, at the moment, have anything close to the full capacity of a human. It is still left to human interpretation as to how and to what level to imple ...
... What good, then, are even the revised laws if they cannot be directly put into practice? Luckily, our robots do not need the laws in English and will not, at the moment, have anything close to the full capacity of a human. It is still left to human interpretation as to how and to what level to imple ...

events:knowledge-workshop-iros2011:tikanmaki.pdf (340.2 KB)
... the information learnt could be used on another robot? And most of all, how to make it so that it can be continuously expanded with new information, new algorithms and new functionalities without making the system too complex to handle? All these questions can be answered, when we can define a gener ...
... the information learnt could be used on another robot? And most of all, how to make it so that it can be continuously expanded with new information, new algorithms and new functionalities without making the system too complex to handle? All these questions can be answered, when we can define a gener ...
Behavior-based robotics as a tool for synthesis of artificial behavior
... may not have a specific internal ‘flocking’ behavior; instead, its interaction with the environment and other robots may produce flocking. Typically, behavior-based systems are designed so that the effects of the behaviors interact in the environment, rather than internally through the system, so as ...
... may not have a specific internal ‘flocking’ behavior; instead, its interaction with the environment and other robots may produce flocking. Typically, behavior-based systems are designed so that the effects of the behaviors interact in the environment, rather than internally through the system, so as ...

Form, function and the matter of experience
... program that did something interestingly cognitive have been asked the question; but does it know what it is doing? Does it know that it is doing something? Turing (1950) discussed this question under the heading ‘the argument from consciousness’, and attributed it to Professor Jefferson who spoke a ...
... program that did something interestingly cognitive have been asked the question; but does it know what it is doing? Does it know that it is doing something? Turing (1950) discussed this question under the heading ‘the argument from consciousness’, and attributed it to Professor Jefferson who spoke a ...

Robots as moral agents, in Machine Medical Ethics , eds. Mattijs
... (or a group of professionals) in the best interests of a patient and were then communicated to the patient. This paternalism was based on a knowledge gap between the medical professional and the patient and between the professional and the public, as well as on the relative clarity of medical decisi ...
... (or a group of professionals) in the best interests of a patient and were then communicated to the patient. This paternalism was based on a knowledge gap between the medical professional and the patient and between the professional and the public, as well as on the relative clarity of medical decisi ...

... into the control system only when engineering a solution becomes too complex. Roboticists tend to strive for advances in hardware and software to solve robotics problems because this route to success is still more direct than the use of learning. In contrast, advocates of robot learning predict that ...

"Computer Program Learns Language Rules and Composes
... the computer for its slow speed or the television for its poor reception. The chatbot George recently won the Loebner prize for the program that converses most like a human, though when engaged with actual people, up to 11 percent of the language directed toward George was abusive, and some of the i ...
... the computer for its slow speed or the television for its poor reception. The chatbot George recently won the Loebner prize for the program that converses most like a human, though when engaged with actual people, up to 11 percent of the language directed toward George was abusive, and some of the i ...
Human Implications of Human-Robot Interaction AAAI Press Papers from the AAAI Workshop
... retains the right of first refusal to any publication (including electronic distribution) arising from this AAAI event. Please do not make any inquiries or arrangements for hardcopy or electronic publication of all or part of the papers contained in these working notes without first exploring the op ...
... retains the right of first refusal to any publication (including electronic distribution) arising from this AAAI event. Please do not make any inquiries or arrangements for hardcopy or electronic publication of all or part of the papers contained in these working notes without first exploring the op ...

A Cognitive Architecture for a Humanoid Robot: A First Approach
... Petri net based formulation of robotic tasks is quite popular for industrial robots especially for manufacturing tasks (see e.g. [29]). For intelligent robots and machines in general, implementations especially for the coordination layer have been proposed by [30]. But there exist only few papers us ...
... Petri net based formulation of robotic tasks is quite popular for industrial robots especially for manufacturing tasks (see e.g. [29]). For intelligent robots and machines in general, implementations especially for the coordination layer have been proposed by [30]. But there exist only few papers us ...
Extending Player/Stage/Gazebo towards Cognitive
... As an example, it should be possible to easily combine an off-the-shelf navigation system (motors, encoders and controller) with a range finder sensor (sonar, laser, etc) to build a mobile platform with a minimum programming effort, and use the same platform to develop localization and mapping algor ...
... As an example, it should be possible to easily combine an off-the-shelf navigation system (motors, encoders and controller) with a range finder sensor (sonar, laser, etc) to build a mobile platform with a minimum programming effort, and use the same platform to develop localization and mapping algor ...

From Solitary to Collective Behaviours: Decision Making and
... was based either on a priori assumptions or on clearly distinguishable environmental cues [8, 7, 10], which may reduce the adaptiveness of a solution and the efficiency of the system as a whole. We believe that a truly adaptive system should prove capable of autonomously extracting all the informati ...
... was based either on a priori assumptions or on clearly distinguishable environmental cues [8, 7, 10], which may reduce the adaptiveness of a solution and the efficiency of the system as a whole. We believe that a truly adaptive system should prove capable of autonomously extracting all the informati ...
Artificial Intelligence
... machine? The debate is ongoing. Humans are capable of several traits. Among them are reasoning, planning, learning, and communication. Are computers and machines capable of the same traits? Essentially, the definition of artificial intelligence is the intelligence that a machine demonstrates. With t ...
... machine? The debate is ongoing. Humans are capable of several traits. Among them are reasoning, planning, learning, and communication. Are computers and machines capable of the same traits? Essentially, the definition of artificial intelligence is the intelligence that a machine demonstrates. With t ...

Today, the usage of artificial intelligence in military
... Elon Musk, CEO of Tesla which is an American automotive and energy storage company is at the same side as Bostrom. He, through his account Twitter has shown his concern towards this issue by urging the society to be extra careful with AI because it has the potential to be more perilous than nukes. R ...
... Elon Musk, CEO of Tesla which is an American automotive and energy storage company is at the same side as Bostrom. He, through his account Twitter has shown his concern towards this issue by urging the society to be extra careful with AI because it has the potential to be more perilous than nukes. R ...

here - FER
... aware of each other, and their actions are mutually beneficial. Robots in a society that functions this way may work together and reason about each other’s capability to contribute to the completion of a given task. At times, the individual robots may be working on different parts of the higher goal ...
... aware of each other, and their actions are mutually beneficial. Robots in a society that functions this way may work together and reason about each other’s capability to contribute to the completion of a given task. At times, the individual robots may be working on different parts of the higher goal ...

SCCS451: Artificial Intelligence
... The objective of this project is to make you understand the concept of Artificial Intelligence using Robocode as a tool. This project is divided into two parts: 1) applying search techniques and 2) applying rule-based expert system. For both parts, you are required to apply specific techniques to yo ...
... The objective of this project is to make you understand the concept of Artificial Intelligence using Robocode as a tool. This project is divided into two parts: 1) applying search techniques and 2) applying rule-based expert system. For both parts, you are required to apply specific techniques to yo ...
Making Robots and Making Robots Intelligent
... According to Merriam-Webster: 1 : A machine that looks like a human being and performs various complex acts (as walking or talking) of a human being; also : a similar but fictional machine whose lack of capacity for human emotions is often emphasized. 2 : A device that automatically performs complic ...
... According to Merriam-Webster: 1 : A machine that looks like a human being and performs various complex acts (as walking or talking) of a human being; also : a similar but fictional machine whose lack of capacity for human emotions is often emphasized. 2 : A device that automatically performs complic ...
KANTRA: Human-Machine Interaction for Intelligent Robots
... many important applications are presented in the first part of the article: the interface can be used for the four main situations of human-machine interaction: task specification, execution monitoring, explanation of error recovering, and updating the environment representation. Information about t ...
... many important applications are presented in the first part of the article: the interface can be used for the four main situations of human-machine interaction: task specification, execution monitoring, explanation of error recovering, and updating the environment representation. Information about t ...

CSC 111 Lab 5 - Canisius College Computer Science
... Make a new program FollowMe.java. It is based on your Follow.java. When the robot loses track of the light, it turns a little and tries to find the light. If it does, it continues forward. The robot should always turn a little in one direction, say 300 milliseconds right. In this way, the robot migh ...
... Make a new program FollowMe.java. It is based on your Follow.java. When the robot loses track of the light, it turns a little and tries to find the light. If it does, it continues forward. The robot should always turn a little in one direction, say 300 milliseconds right. In this way, the robot migh ...

Title Social robotics - Research Repository UCD
... sensor data). Low level robot processing filters these and thus achieves attention focusing, generating a set of agent events. If emergency action is required, a reflex behaviour is activated to overcome the immediate problem and this action is communicated as an agent event to the deliberative leve ...
... sensor data). Low level robot processing filters these and thus achieves attention focusing, generating a set of agent events. If emergency action is required, a reflex behaviour is activated to overcome the immediate problem and this action is communicated as an agent event to the deliberative leve ...
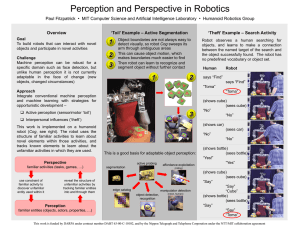
ppt - people.csail.mit.edu
... Paul Fitzpatrick • MIT Computer Science and Artificial Intelligence Laboratory • Humanoid Robotics Group Overview Goal To build robots that can interact with novel objects and participate in novel activities Challenge Machine perception can be robust for a specific domain such as face detection, but ...
... Paul Fitzpatrick • MIT Computer Science and Artificial Intelligence Laboratory • Humanoid Robotics Group Overview Goal To build robots that can interact with novel objects and participate in novel activities Challenge Machine perception can be robust for a specific domain such as face detection, but ...