
The Triangle of Life
... hardware) as introduced in Eiben et al. (2012). The roadmap outlined there considers embodiment in the broad sense, including biochemical approaches and treats mechatronics based embodied evolution as one of the possible incarnations. The work presented here represents the first detailed elaboration ...
... hardware) as introduced in Eiben et al. (2012). The roadmap outlined there considers embodiment in the broad sense, including biochemical approaches and treats mechatronics based embodied evolution as one of the possible incarnations. The work presented here represents the first detailed elaboration ...
Do robots equal humans? Anthropomorphic terminology in LAWS
... facilitates human interaction with robots (for example, we can talk to robots) or a hindrance which leads robot users to create excessive expectations towards robots (for example, we expect robots to fully understand the human language and reasoning) [3]. The anthropomorphisation of military robots ...
... facilitates human interaction with robots (for example, we can talk to robots) or a hindrance which leads robot users to create excessive expectations towards robots (for example, we expect robots to fully understand the human language and reasoning) [3]. The anthropomorphisation of military robots ...

Impossibles AIBO Four-Legged Team Description Paper
... approaches are run in these cases to realize the reason of being blocked. SVS is exploited, because GVS has failed to detect objects exactly in order to let DM module decide what to do properly. Additionally, post-Kidnapped state is happened in few moments. As a case in point, having booked, the rob ...
... approaches are run in these cases to realize the reason of being blocked. SVS is exploited, because GVS has failed to detect objects exactly in order to let DM module decide what to do properly. Additionally, post-Kidnapped state is happened in few moments. As a case in point, having booked, the rob ...

Dance Choreography Design of Humanoid Robots using Interactive
... of variation in genetic algorithms. The probability of mutation of every individual is 80 percent but in a very close neighborhood of each bit (less than 10 percent), so the changes are ’small’. IV. EXPERIMENTS We used 20 people - most of them were university students (19 men and 1 woman) as our sub ...
... of variation in genetic algorithms. The probability of mutation of every individual is 80 percent but in a very close neighborhood of each bit (less than 10 percent), so the changes are ’small’. IV. EXPERIMENTS We used 20 people - most of them were university students (19 men and 1 woman) as our sub ...
Control architectures of a cognitive robot
... And yet, a house fly is much more successful in the real world than our attempts at artificial intelligence. ...
... And yet, a house fly is much more successful in the real world than our attempts at artificial intelligence. ...

Externalizing Internal State *
... Current autonomous robots that are highly reactive are not significantly intelligent and the robots that are significantly intelligent are not highly reactive. The previous research has concentrated on modifications to internal computational structures of robots, ignoring the modifications to extern ...
... Current autonomous robots that are highly reactive are not significantly intelligent and the robots that are significantly intelligent are not highly reactive. The previous research has concentrated on modifications to internal computational structures of robots, ignoring the modifications to extern ...

PDF - Nishant Shukla
... human demonstrator can teach a robot a new task by using natural language and physical gestures. The robot would gradually accumulate and refine its spatial, temporal, and causal understanding of the world. The knowledge can then be transferred back to another human, or further to another robot. The ...
... human demonstrator can teach a robot a new task by using natural language and physical gestures. The robot would gradually accumulate and refine its spatial, temporal, and causal understanding of the world. The knowledge can then be transferred back to another human, or further to another robot. The ...

A Unified Framework for Human
... human demonstrator can teach a robot a new task by using natural language and physical gestures. The robot would gradually accumulate and refine its spatial, temporal, and causal understanding of the world. The knowledge can then be transferred back to another human, or further to another robot. The ...
... human demonstrator can teach a robot a new task by using natural language and physical gestures. The robot would gradually accumulate and refine its spatial, temporal, and causal understanding of the world. The knowledge can then be transferred back to another human, or further to another robot. The ...

An Ontology-Based Symbol Grounding System for Human
... ontology includes terms for entities that range from the general (e.g., PhysicalEntity) to specific (Pasta). Our ontology also has terms for particular products that are known objects recognizable by the vision system. These are described in the ontology itself using product information (name, dimen ...
... ontology includes terms for entities that range from the general (e.g., PhysicalEntity) to specific (Pasta). Our ontology also has terms for particular products that are known objects recognizable by the vision system. These are described in the ontology itself using product information (name, dimen ...
The History of Artificial Intelligence
... trying to make, because his robots eventually rebelled against their creators, ran amok, and tried to wipe out the human race. However, as is usually the case with words, the truth of the matter is a little more convoluted. In the days when Czechoslovakia was a feudal society, "robota" referred to t ...
... trying to make, because his robots eventually rebelled against their creators, ran amok, and tried to wipe out the human race. However, as is usually the case with words, the truth of the matter is a little more convoluted. In the days when Czechoslovakia was a feudal society, "robota" referred to t ...

Hybrid architectures
... Hybrid control and maps (Milford & Wyeth 2010) • Use of low-level immediate sensing to build highlevel map. • Effective if same control system is used in both creating and using this world representation. • Robot placed in new office building environment, learns map (including its charger location) ...
... Hybrid control and maps (Milford & Wyeth 2010) • Use of low-level immediate sensing to build highlevel map. • Effective if same control system is used in both creating and using this world representation. • Robot placed in new office building environment, learns map (including its charger location) ...

A Developmental Approach to Intelligence
... In order to start the entire developmental process, the system needs to experience the world. Only then will the robot have motor and sensor data to organize. However, it is exactly this control that we wish to develop. Our solution to this chicken and egg dependency is to begin with a very basic co ...
... In order to start the entire developmental process, the system needs to experience the world. Only then will the robot have motor and sensor data to organize. However, it is exactly this control that we wish to develop. Our solution to this chicken and egg dependency is to begin with a very basic co ...
Ryan Whitehead Bot Talk In my project, “Bot Talk” we see the
... In my project, “Bot Talk” we see the change in text bots as they are asked different questions, learn from past conversations and are asked tough questions. First, my project is all about bots. “Bots” or “robots”, are simply artificial intelligence. In this case it is just a bot that can hold a simp ...
... In my project, “Bot Talk” we see the change in text bots as they are asked different questions, learn from past conversations and are asked tough questions. First, my project is all about bots. “Bots” or “robots”, are simply artificial intelligence. In this case it is just a bot that can hold a simp ...
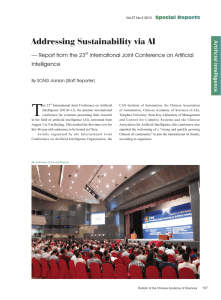
Addressing Sustainability via AI - Report from the 23rd International
... Scientists have endeavored to develop AI to a more advanced level where machines can be highly smart — say, as smart as humans. Some believe that it is only limited by ingenuity and physics, and progress seems to be accelerating, according to Stuart Russell, chair of the panel discussion, and scient ...
... Scientists have endeavored to develop AI to a more advanced level where machines can be highly smart — say, as smart as humans. Some believe that it is only limited by ingenuity and physics, and progress seems to be accelerating, according to Stuart Russell, chair of the panel discussion, and scient ...
Brief History of Artificial Intelligence - OCW
... Robot, which is derived from a Czech word meaning "menial labor," got its modern meaning from a 1920 play, R.U.R. (Rossum's Universal Robots), by Czech playwright Karel Capek (18901938). The robots in Capek's play develop emotions and overthrow their human masters. A sinister "power struggle" with r ...
... Robot, which is derived from a Czech word meaning "menial labor," got its modern meaning from a 1920 play, R.U.R. (Rossum's Universal Robots), by Czech playwright Karel Capek (18901938). The robots in Capek's play develop emotions and overthrow their human masters. A sinister "power struggle" with r ...

How engineeRing caRRied out tHe PRoject
... capacity of rational agents to choose a course of action ...
... capacity of rational agents to choose a course of action ...
news summary (44) - Quest Group`s Blog
... same information or share the same perspective while they’re playing.’ He added that DeepStack’s winning streak would have major implications for the world outside poker. ‘Think of any real world problem,’ Prof Bowling said. ‘We all have a slightly different perspective of what’s going on – much lik ...
... same information or share the same perspective while they’re playing.’ He added that DeepStack’s winning streak would have major implications for the world outside poker. ‘Think of any real world problem,’ Prof Bowling said. ‘We all have a slightly different perspective of what’s going on – much lik ...
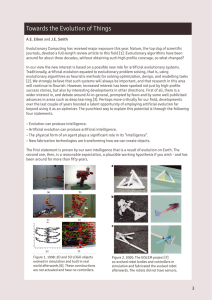
Towards the Evolution of Things
... Beyond that we have the greater challenges of coordinated action: a team of robots that can beat the world champions of football. This brings us back to the working hypothesis above that identifies evolution as a potential approach to achieving intelligent behavior in entities with a mind and a body ...
... Beyond that we have the greater challenges of coordinated action: a team of robots that can beat the world champions of football. This brings us back to the working hypothesis above that identifies evolution as a potential approach to achieving intelligent behavior in entities with a mind and a body ...

Towards a theory of Hybrid Intelligent Autonomous Systems
... been actively studied and applied to domains such as automatically control of complex systems like robot. In fact, recognition, learning, decision-making, and action constitute the principal obstacle avoidance ...
... been actively studied and applied to domains such as automatically control of complex systems like robot. In fact, recognition, learning, decision-making, and action constitute the principal obstacle avoidance ...

Moral and ethical questions for robotics public policy
... agents, and are not permitted to enter contracts, and largely are not held fully responsible for (at least some of) their actions (9). If this continuum of morality were applied to robots, then agency is likely to be defined by the sophistication of the robot’s programming, with a less advanced mach ...
... agents, and are not permitted to enter contracts, and largely are not held fully responsible for (at least some of) their actions (9). If this continuum of morality were applied to robots, then agency is likely to be defined by the sophistication of the robot’s programming, with a less advanced mach ...
File - Operating In The Robotic Matrix
... Every year, robotic design changes and we find new uses for robots. Will there be a time when robots will complete all physical labor for humans and humans will not be required to work? ...
... Every year, robotic design changes and we find new uses for robots. Will there be a time when robots will complete all physical labor for humans and humans will not be required to work? ...

1.5 Impact of emerging technologies
... Artificial intelligence (AI) is computer systems that can simulate human intelligence (able to make decisions typically made by a human). • The PR2 robot is being programmed to complete a number of specific tasks just like a human. • Deep Blue was a chess-playing computer developed by IBM. It is kno ...
... Artificial intelligence (AI) is computer systems that can simulate human intelligence (able to make decisions typically made by a human). • The PR2 robot is being programmed to complete a number of specific tasks just like a human. • Deep Blue was a chess-playing computer developed by IBM. It is kno ...

Artificial Neural Networks For Spatial Perception
... observed position of an object in both camera images. The position is described by the centre of the detected object in the image plane (X and Y coordinate) and additionally by the bounding box of the detected object (upper-left corner, width and height), Fig. 3. The neural network approach requires ...
... observed position of an object in both camera images. The position is described by the centre of the detected object in the image plane (X and Y coordinate) and additionally by the bounding box of the detected object (upper-left corner, width and height), Fig. 3. The neural network approach requires ...