


3-3 Proving Lines Parallel
... 6. Vert.∠s Thm. 7. Substitution 8. Conv. of Same-Side Interior ∠s Post. ...
... 6. Vert.∠s Thm. 7. Substitution 8. Conv. of Same-Side Interior ∠s Post. ...

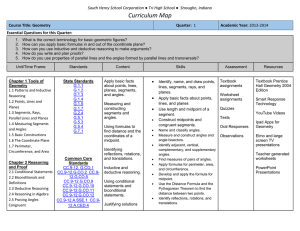
Geometry Math Standards - Northbrook District 28
... I can precisely define an angle, circle, perpendicular line, parallel line, and line segment using the definition of a point, line, distance along a line, and distance around a circular arc. I can apply my knowledge of transformations to identify corresponding points of an image and preimage. I can ...
... I can precisely define an angle, circle, perpendicular line, parallel line, and line segment using the definition of a point, line, distance along a line, and distance around a circular arc. I can apply my knowledge of transformations to identify corresponding points of an image and preimage. I can ...
isometry
... 1. An isometry f is a translation if it is direct and is either the identity or has no fixed points. 2. An isometry f is a rotation if it is a direct isometry and is either the identity or there exists exactly one fixed point P (the center of rotation). 3. An isometry f is a reflection through the l ...
... 1. An isometry f is a translation if it is direct and is either the identity or has no fixed points. 2. An isometry f is a rotation if it is a direct isometry and is either the identity or there exists exactly one fixed point P (the center of rotation). 3. An isometry f is a reflection through the l ...

Parallel Postulate
... Euclid of Alexandria was born around 325 BC. Most believe that he was a student of Plato. Euclid introduced the idea of an axiomatic geometry when he presented his 13 chapter book titled The Elements of Geometry. The Elements he introduced were simply fundamental geometric principles called axioms a ...
... Euclid of Alexandria was born around 325 BC. Most believe that he was a student of Plato. Euclid introduced the idea of an axiomatic geometry when he presented his 13 chapter book titled The Elements of Geometry. The Elements he introduced were simply fundamental geometric principles called axioms a ...




Non-Euclidean Geometry, Topology, and Networks
... Saccheri began with a quadrilateral, as in Figure 75. He assumed angles A and B to be right angles and sides AD and BC to be equal. His plan was as follows: 1. To assume that angles C and D are obtuse angles, and to show that this leads to a contradiction. 2. To assume that angles C and D are acute ...
... Saccheri began with a quadrilateral, as in Figure 75. He assumed angles A and B to be right angles and sides AD and BC to be equal. His plan was as follows: 1. To assume that angles C and D are obtuse angles, and to show that this leads to a contradiction. 2. To assume that angles C and D are acute ...

Definitions - WordPress.com
... And of the quadrilateral figures: a square is that which is right-angled and equilateral, a rectangle that which is right-angled but not equilateral, a rhombus that which is equilateral but not right-angled, and a rhomboid that having opposite sides and angles equal to one another which is neither r ...
... And of the quadrilateral figures: a square is that which is right-angled and equilateral, a rectangle that which is right-angled but not equilateral, a rhombus that which is equilateral but not right-angled, and a rhomboid that having opposite sides and angles equal to one another which is neither r ...


Computational Geometry
... • What if only the vertices of the triangle are given? • Given 3 vertices (x1, y1), (x2, y2), (x3, y3) • Area = abs( x1*y2 + x2*y3 + x3*y1 - x2*y1 x3*y2 - x1*y3 ) / 2 • Note: abs can be omitted if the vertices are in counterclockwise order. If the vertices are in clockwise order, the difference eval ...
... • What if only the vertices of the triangle are given? • Given 3 vertices (x1, y1), (x2, y2), (x3, y3) • Area = abs( x1*y2 + x2*y3 + x3*y1 - x2*y1 x3*y2 - x1*y3 ) / 2 • Note: abs can be omitted if the vertices are in counterclockwise order. If the vertices are in clockwise order, the difference eval ...







Lie sphere geometry

Lie sphere geometry is a geometrical theory of planar or spatial geometry in which the fundamental concept is the circle or sphere. It was introduced by Sophus Lie in the nineteenth century. The main idea which leads to Lie sphere geometry is that lines (or planes) should be regarded as circles (or spheres) of infinite radius and that points in the plane (or space) should be regarded as circles (or spheres) of zero radius.The space of circles in the plane (or spheres in space), including points and lines (or planes) turns out to be a manifold known as the Lie quadric (a quadric hypersurface in projective space). Lie sphere geometry is the geometry of the Lie quadric and the Lie transformations which preserve it. This geometry can be difficult to visualize because Lie transformations do not preserve points in general: points can be transformed into circles (or spheres).To handle this, curves in the plane and surfaces in space are studied using their contact lifts, which are determined by their tangent spaces. This provides a natural realisation of the osculating circle to a curve, and the curvature spheres of a surface. It also allows for a natural treatment of Dupin cyclides and a conceptual solution of the problem of Apollonius.Lie sphere geometry can be defined in any dimension, but the case of the plane and 3-dimensional space are the most important. In the latter case, Lie noticed a remarkable similarity between the Lie quadric of spheres in 3-dimensions, and the space of lines in 3-dimensional projective space, which is also a quadric hypersurface in a 5-dimensional projective space, called the Plücker or Klein quadric. This similarity led Lie to his famous ""line-sphere correspondence"" between the space of lines and the space of spheres in 3-dimensional space.