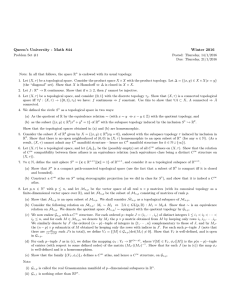
CM222A LINEAR ALGEBRA Solutions 1 1. Determine whether the
... spanning, w = 1 αi vi for some scalars αi and w − 1 αi vi = 0 shows that T is linearly dependent. Conversely, if S satisfies (i) and (ii) it is linearly independent. To show that it is spanning, let v be any vector.PIf v ∈ S then clearly v ∈ span S. If v ∈ / S then S ∪ {v} is linearly dependent so f ...
... spanning, w = 1 αi vi for some scalars αi and w − 1 αi vi = 0 shows that T is linearly dependent. Conversely, if S satisfies (i) and (ii) it is linearly independent. To show that it is spanning, let v be any vector.PIf v ∈ S then clearly v ∈ span S. If v ∈ / S then S ∪ {v} is linearly dependent so f ...


Notes-17
... electrons, higher order EM transitions can occur. They are called E2, E3,.. M1, M2.., so on, or electric multipole and magnetic multipole transitions. By going beyond the first-order perturbation theory, one can also have multi-photon transitions. For example, the 1s-2s transition in atomic hydrogen ...
... electrons, higher order EM transitions can occur. They are called E2, E3,.. M1, M2.., so on, or electric multipole and magnetic multipole transitions. By going beyond the first-order perturbation theory, one can also have multi-photon transitions. For example, the 1s-2s transition in atomic hydrogen ...



3.8 Matrices
... • AB may be defined but BA may not. (e.g. if A is 2x3 and B is 3x4) • AB and BA may both defined, but they may have different sizes.(e.g. if A is 2x3 and B is 3x2) • AB and BA may both defined and have the same sizes, but the two matrices may be different. (see the previous example). ...
... • AB may be defined but BA may not. (e.g. if A is 2x3 and B is 3x4) • AB and BA may both defined, but they may have different sizes.(e.g. if A is 2x3 and B is 3x2) • AB and BA may both defined and have the same sizes, but the two matrices may be different. (see the previous example). ...


Solutions - UO Math Department
... m. False. All the diagonal entries of an upper triangular matrix are the eigenvalues of the matrix (Theorem 1 in Section 5.1). A diagonal entry may be zero. n. True. Matrices A and AT have the same characteristic polynomial, because det( AT − λI ) = det( A − λI )T = det( A − λI ), by the determinant ...
... m. False. All the diagonal entries of an upper triangular matrix are the eigenvalues of the matrix (Theorem 1 in Section 5.1). A diagonal entry may be zero. n. True. Matrices A and AT have the same characteristic polynomial, because det( AT − λI ) = det( A − λI )T = det( A − λI ), by the determinant ...





PreCal Standards
... velocity and other quantities that can be represented by vectors. Perform operations on vectors. a. Add and subtract vectors using components of the vectors and graphically. b. Given the magnitude and direction of two vectors, determine the magnitude of their sum and of their difference. Multiply a ...
... velocity and other quantities that can be represented by vectors. Perform operations on vectors. a. Add and subtract vectors using components of the vectors and graphically. b. Given the magnitude and direction of two vectors, determine the magnitude of their sum and of their difference. Multiply a ...