

Chapter 3 Subspaces
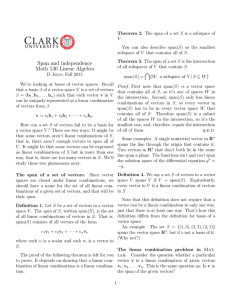
... where we let αi = −βi for 1 ≤ i ≤ k. But (e1 , . . . , en ) is a basis for V , and hence is linearly independent, so all the coefficients must be zero. In particular, αk+1 = · · · = αn = 0, and we conclude that B is linearly independent. Thus B is a basis for V /U of size n − k, giving the result. ...
... where we let αi = −βi for 1 ≤ i ≤ k. But (e1 , . . . , en ) is a basis for V , and hence is linearly independent, so all the coefficients must be zero. In particular, αk+1 = · · · = αn = 0, and we conclude that B is linearly independent. Thus B is a basis for V /U of size n − k, giving the result. ...


Document
... 1) The direction of E at any point is tangent to the line of force at that point. 2) The density of lines of force in any region is proportional to the magnitude of E in that region ...
... 1) The direction of E at any point is tangent to the line of force at that point. 2) The density of lines of force in any region is proportional to the magnitude of E in that region ...

A`, B`, and C`.
... those living in a certain city will move to its suburbs while 3% of those living in the suburbs will move into the city. Write a transition matrix T that describes the situation. ...
... those living in a certain city will move to its suburbs while 3% of those living in the suburbs will move into the city. Write a transition matrix T that describes the situation. ...


Solutions of First Order Linear Systems
... (c) Repeated Eigenvalues: If an eigenvalue is repeated we need to analyse the matrix A more carefully to find the corresponding vector solutions. Definition 1. The Algebraic Multiplicity (AM) of an eigenvalue λ is the number of times it appears as a root of the characteristic equation det(A − λI) = ...
... (c) Repeated Eigenvalues: If an eigenvalue is repeated we need to analyse the matrix A more carefully to find the corresponding vector solutions. Definition 1. The Algebraic Multiplicity (AM) of an eigenvalue λ is the number of times it appears as a root of the characteristic equation det(A − λI) = ...


u · v
... vectors. To provide maximum geometric insight, we concentrate on vectors in two-space and three-space. Later, in Chapter 3, we will generalize many of the ideas developed in this chapter and apply them to a study of vectors in n-space, that is, to vectors in Rn. A major emphasis in Chapter 3 is on c ...
... vectors. To provide maximum geometric insight, we concentrate on vectors in two-space and three-space. Later, in Chapter 3, we will generalize many of the ideas developed in this chapter and apply them to a study of vectors in n-space, that is, to vectors in Rn. A major emphasis in Chapter 3 is on c ...