











Chapter 2 Solving Linear Systems
... The inverse of matrix A is denoted by A-1 The size of A-1 is the same as A and A A-1 = I = A-1 A Any Matrix times its own inverse is just the appropriately sized identity matrix ...
... The inverse of matrix A is denoted by A-1 The size of A-1 is the same as A and A A-1 = I = A-1 A Any Matrix times its own inverse is just the appropriately sized identity matrix ...

Exam 3 Solutions
... There is one free variable: x1 , so we set x1 = t. The first row of A − 3I gives x2 = 0. Thus, a vector x is in the eigenspace of 3 if ...
... There is one free variable: x1 , so we set x1 = t. The first row of A − 3I gives x2 = 0. Thus, a vector x is in the eigenspace of 3 if ...





stphysic - The Skeptic Tank
... >To intensify this oddity, consider the fact that all inertial frames are equivalent. That is, from the traveler's point of view he is the one who is sitting still, while I zip past him at 0.6 c. So he will think that it is MY clock that is running slowly. This lends itself over to what seem to be p ...
... >To intensify this oddity, consider the fact that all inertial frames are equivalent. That is, from the traveler's point of view he is the one who is sitting still, while I zip past him at 0.6 c. So he will think that it is MY clock that is running slowly. This lends itself over to what seem to be p ...





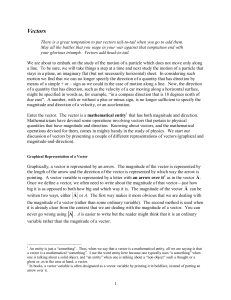
A Brief on Linear Algebra
... do not, think of the set R as a vector space over the field R. Our purpose in pointing this out is really the observation that for this very simple vector space, there is a single vector, namely the vector 1 in terms of which every vector in R can be represented as an appropriate multiple. For examp ...
... do not, think of the set R as a vector space over the field R. Our purpose in pointing this out is really the observation that for this very simple vector space, there is a single vector, namely the vector 1 in terms of which every vector in R can be represented as an appropriate multiple. For examp ...