




Special cases of linear mappings (a) Rotations around the origin Let
... Question: what is the percentage of infected trees, if the tree stand is undisturbed for many years and the transition probabilities remain the same? We have to look for a fixed point of the mapping corresponding to PT. Because PT is a stochastic matrix, it has automatically the eigenvalue 1. We ha ...
... Question: what is the percentage of infected trees, if the tree stand is undisturbed for many years and the transition probabilities remain the same? We have to look for a fixed point of the mapping corresponding to PT. Because PT is a stochastic matrix, it has automatically the eigenvalue 1. We ha ...





Matrices - what is a matrix
... This leaflet will explain what is meant by a matrix and the notation we use to describe matrices. We will also look at some special types of matrix. A matrix is a rectangular pattern of numbers - we usually enclose the numbers with brackets. So, for example, the following are all matrices. ...
... This leaflet will explain what is meant by a matrix and the notation we use to describe matrices. We will also look at some special types of matrix. A matrix is a rectangular pattern of numbers - we usually enclose the numbers with brackets. So, for example, the following are all matrices. ...
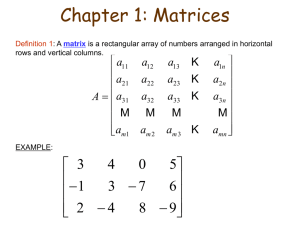
Chapter 1: Matrices
... (R1) All zero rows appear below nonzero rows when both types are present in the matrix. (R2) The first nonzero element in any nonzero row is unity. (R3) All elements directly below (that is, in the same column but in succeeding rows from) the first nonzero element of a nonzero row are zero. (R4) The ...
... (R1) All zero rows appear below nonzero rows when both types are present in the matrix. (R2) The first nonzero element in any nonzero row is unity. (R3) All elements directly below (that is, in the same column but in succeeding rows from) the first nonzero element of a nonzero row are zero. (R4) The ...







8.2 operations with matrices
... Matrix Addition and Scalar Multiplication If A is an m n matrix and O is the m n zero matrix consisting entirely of zeros, then A + O = A. O is the additive identity for the set of all m n matrices. ...
... Matrix Addition and Scalar Multiplication If A is an m n matrix and O is the m n zero matrix consisting entirely of zeros, then A + O = A. O is the additive identity for the set of all m n matrices. ...

Partial Solution Set, Leon Sections 5.1, 5.2 5.2.3 (a) Let S = Span(x
... by the given vectors is simply RS(A). So we want N(A) . Computing a basis for N(A) in the usual way, we find that N(A) = Span(−5, 1, 3)T . (When computing an arbitrary nullspace vector from the reduced matrix, you might have found something like x = (−5s/3, s/3, s), but don’t forget that any multipl ...
... by the given vectors is simply RS(A). So we want N(A) . Computing a basis for N(A) in the usual way, we find that N(A) = Span(−5, 1, 3)T . (When computing an arbitrary nullspace vector from the reduced matrix, you might have found something like x = (−5s/3, s/3, s), but don’t forget that any multipl ...

