How mobile robots can self-organise a vocabulary
... meaning. As physical symbol grounding can in principle be achieved by individual agents, the ability to develop a shared symbolic communication system is a (much) harder challenge. This challenge, which I have called social symbol grounding (Vogt & Divina 2007), has remained my primary research focu ...
... meaning. As physical symbol grounding can in principle be achieved by individual agents, the ability to develop a shared symbolic communication system is a (much) harder challenge. This challenge, which I have called social symbol grounding (Vogt & Divina 2007), has remained my primary research focu ...
Implementation of the Potential Field Method for
... Method on the TURTLE soccer robots used by TECHUNITED. The PFM is a method in which a robot can drive to a target without a preprogammed path. It is capable of avoiding obstacles placed at random positions. The steps taken during this project will help the TECHUNITED team decide whether or not to ch ...
... Method on the TURTLE soccer robots used by TECHUNITED. The PFM is a method in which a robot can drive to a target without a preprogammed path. It is capable of avoiding obstacles placed at random positions. The steps taken during this project will help the TECHUNITED team decide whether or not to ch ...
ppt
... What lessons for robots from these alternative views? At first sight, they are negative and unhelpful ! For everyday robot actions this implies we should do without planning, without the computational model, without internal representations ... .... but what should we do instead ? Non-Symbolic AI le ...
... What lessons for robots from these alternative views? At first sight, they are negative and unhelpful ! For everyday robot actions this implies we should do without planning, without the computational model, without internal representations ... .... but what should we do instead ? Non-Symbolic AI le ...
Cyberbotics` Robot Curriculum
... Starting from this point of view, the Turing test makes it possible to evaluate whether or not a machine qualifies for artificial intelligence relatively to an observer. The test consists in a simple setup where the observer is facing a machine. The machine could be a computer or a robot, it does no ...
... Starting from this point of view, the Turing test makes it possible to evaluate whether or not a machine qualifies for artificial intelligence relatively to an observer. The test consists in a simple setup where the observer is facing a machine. The machine could be a computer or a robot, it does no ...

From Natural Language to Soft Computing: New Paradigms
... During the afternoon a meeting was held with all the workshop participants and various networks of collaboration have been set up, their main connection point being the IJCCC journal. On May 18, after 4 nights of accommodation at Hotel Termal, the participants have left the Felix Spa with many new e ...
... During the afternoon a meeting was held with all the workshop participants and various networks of collaboration have been set up, their main connection point being the IJCCC journal. On May 18, after 4 nights of accommodation at Hotel Termal, the participants have left the Felix Spa with many new e ...
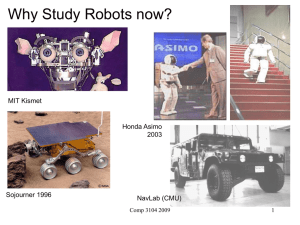
Robot Control Paradigms Intelligent Mobile Robotics CS 490 Fall 2002
... The Brain can communicate with all parts Arms can take commands as left, right, up, down, forward, and backward Arms can answer yes/no about whether they are touching something but cannot distinguish what they are touching ...
... The Brain can communicate with all parts Arms can take commands as left, right, up, down, forward, and backward Arms can answer yes/no about whether they are touching something but cannot distinguish what they are touching ...
Lego Mindstorms NXT 2.0 - hanan-salah
... again. This cycle of boom and bust, of "AI winters" and summers, continues to haunt the field. Undaunted, there are those who make extraordinary predictions even now. The term artificial intelligence was first coined by John McCarthy in 1956 when he held the first academic conference on the subject. ...
... again. This cycle of boom and bust, of "AI winters" and summers, continues to haunt the field. Undaunted, there are those who make extraordinary predictions even now. The term artificial intelligence was first coined by John McCarthy in 1956 when he held the first academic conference on the subject. ...

word office version - European Parliament
... implement them in the outside world, independently of external control or influence; whereas this autonomy is of a purely technological nature and its degree depends on how sophisticated a robot's interaction with its environment has been designed to be; AB. whereas the more autonomous robots are, t ...
... implement them in the outside world, independently of external control or influence; whereas this autonomy is of a purely technological nature and its degree depends on how sophisticated a robot's interaction with its environment has been designed to be; AB. whereas the more autonomous robots are, t ...

38. Behavior-Based Systems - Server users.dimi.uniud.it
... with the robot’s immediate needs, such as moving while avoiding obstacles, and thus operates on a very fast time scale and uses direct external sensory data and signals. In contrast, the deliberative component uses highly abstracted, symbolic, internal representations of the world, and operates on t ...
... with the robot’s immediate needs, such as moving while avoiding obstacles, and thus operates on a very fast time scale and uses direct external sensory data and signals. In contrast, the deliberative component uses highly abstracted, symbolic, internal representations of the world, and operates on t ...
Robotics - Krupa Vara Prasad Adimulapu
... Computer vision is the science and technology of machines that see. As a scientific discipline, computer vision is concerned with the theory behind artificial systems that extract information from images. The image data can take many forms, such as video sequences and views from cameras. In most pra ...
... Computer vision is the science and technology of machines that see. As a scientific discipline, computer vision is concerned with the theory behind artificial systems that extract information from images. The image data can take many forms, such as video sequences and views from cameras. In most pra ...

Nagai
... problem, Fasel et al. (2002) presented a developmental model of joint attention based on a proper interaction of innate motivations and contingency learning. However, the validity of their model has not been verified through the implementation to an artificial agent. Nagai et al. (2002) proposed a c ...
... problem, Fasel et al. (2002) presented a developmental model of joint attention based on a proper interaction of innate motivations and contingency learning. However, the validity of their model has not been verified through the implementation to an artificial agent. Nagai et al. (2002) proposed a c ...

A Robot Exploration and Mapping Strategy Based on a Semantic
... Because of low mechanical accuracy and sensory errors, it is often difficult to get accurate metrical information in large-scale space [Brooks, 1985; Chatila and Laumond, 1985]. Some of the traditional methods perform reasonably well where environments are small enough to observe most important feat ...
... Because of low mechanical accuracy and sensory errors, it is often difficult to get accurate metrical information in large-scale space [Brooks, 1985; Chatila and Laumond, 1985]. Some of the traditional methods perform reasonably well where environments are small enough to observe most important feat ...
Humanoid Robots That Behave, Speak, and Think Like Humans: A
... human brain a proprioceptive self-knowledge capability. Even a baby, with a self-knowledge capability, instinctively knows the location of every surface point on its body, the location of its flailing limbs, and by extension, the location of every coordinate frame point in the near space defined by ...
... human brain a proprioceptive self-knowledge capability. Even a baby, with a self-knowledge capability, instinctively knows the location of every surface point on its body, the location of its flailing limbs, and by extension, the location of every coordinate frame point in the near space defined by ...

review and analysis of different methodologies used in mobile robot
... the selected path should be optimized (i.e. having smallest possible distance and minimum number of turns) to make sure that least amount of energy and time are used by the robot in roaming from starting point to its target. A lot of research work has been carried out in order to solve this problem. ...
... the selected path should be optimized (i.e. having smallest possible distance and minimum number of turns) to make sure that least amount of energy and time are used by the robot in roaming from starting point to its target. A lot of research work has been carried out in order to solve this problem. ...

Autonomous agent based on reinforcement learning
... The planning of intelligent robot behavior plays an important role in the development of flexible automated systems. The robot’s intelligence comprises its capability to act in unpredictable and chaotic situations, which requires not just a change but the creation of the robot's working knowledge. P ...
... The planning of intelligent robot behavior plays an important role in the development of flexible automated systems. The robot’s intelligence comprises its capability to act in unpredictable and chaotic situations, which requires not just a change but the creation of the robot's working knowledge. P ...
Robotic-fall05-4 - Computer Engineering
... but what about walking? If a robot can stay continuously balanced while walking, it employs statically stable walking Impossible with 3 legs; as soon as one is off the ground, only 2 are left, which is unstable How many legs are needed for statically stable walking? Introduction to Robotics ...
... but what about walking? If a robot can stay continuously balanced while walking, it employs statically stable walking Impossible with 3 legs; as soon as one is off the ground, only 2 are left, which is unstable How many legs are needed for statically stable walking? Introduction to Robotics ...
Robotics
... • Aim: support elderly to more actively and safely spend their time and live longer independently in their own home. ...
... • Aim: support elderly to more actively and safely spend their time and live longer independently in their own home. ...

Natural Language Interaction with Robots Alden Walker May 7, 2007
... When giving a robot commands, a user typically must give short, blunt commands or remember a long list of precise phrases that must be input exactly as expected. Usually, robots either do not take commands in textual form (they have a joystick, for instance), or take a set of commands which are pre- ...
... When giving a robot commands, a user typically must give short, blunt commands or remember a long list of precise phrases that must be input exactly as expected. Usually, robots either do not take commands in textual form (they have a joystick, for instance), or take a set of commands which are pre- ...
Human-Robot-Communication and Machine Learning
... materials transport, mobile surveillance systems, and oor cleaning (Schraft, 1994). In addition, the idea of the "personal robot" or "personal robotic assistant" (e.g., for aiding the elderly or disabled) is lately receiving a lot of attention. Robot manufacturers all over the world are expecting t ...
... materials transport, mobile surveillance systems, and oor cleaning (Schraft, 1994). In addition, the idea of the "personal robot" or "personal robotic assistant" (e.g., for aiding the elderly or disabled) is lately receiving a lot of attention. Robot manufacturers all over the world are expecting t ...

Exploring Muscular Contribution during Stepping of Biomimetic
... • Hip joint: Hip angular changes are controlled by 1 passive and 2 active muscles. While flexor movements are controlled by an elastic rubber which simulates a hip flexor, such as iliopsoas (IL), extensor movements of the hip are either actuated by a monoarticular muscle (inserting at the femur, suc ...
... • Hip joint: Hip angular changes are controlled by 1 passive and 2 active muscles. While flexor movements are controlled by an elastic rubber which simulates a hip flexor, such as iliopsoas (IL), extensor movements of the hip are either actuated by a monoarticular muscle (inserting at the femur, suc ...

A Relational Approach to Tool
... by trying to match its own set of action models to the execution trace of the teacher’s demonstration. Gaps in the explanation, where the agent is unable to match an existing behaviour to what the teacher is doing, are designated novel behaviours, which the robot can try to learn. The first difficul ...
... by trying to match its own set of action models to the execution trace of the teacher’s demonstration. Gaps in the explanation, where the agent is unable to match an existing behaviour to what the teacher is doing, are designated novel behaviours, which the robot can try to learn. The first difficul ...
The Intelligent Conversational Humanoid Robot
... spawned numerous, passionate debates on the subject of artificial intelligence [1]. It has also spawned the famous Turing Test, a test which determines if a particular machine (or algorithm) can pass as a human. Since its inception, the Turing Test has, in fact, been passed by a few artificial intel ...
... spawned numerous, passionate debates on the subject of artificial intelligence [1]. It has also spawned the famous Turing Test, a test which determines if a particular machine (or algorithm) can pass as a human. Since its inception, the Turing Test has, in fact, been passed by a few artificial intel ...

Cognitive Robotics - Knowledge
... changing world. A suitable knowledge representation language must at the very least provide fluents, that is, predicate or function symbols able to change their values as a result of changes in the world. For our purposes, we will use the situation calculus; but there are many other possible choices ...
... changing world. A suitable knowledge representation language must at the very least provide fluents, that is, predicate or function symbols able to change their values as a result of changes in the world. For our purposes, we will use the situation calculus; but there are many other possible choices ...

A Case-Based Approach To Imitation Learning in Robotic Agents
... The ability to learn from imitation would allow a robotic agent to learn skills quickly, while enabling the human teacher to convey the skill more intuitively. One focus of Human-Robot Interaction research is to enable robots to interface with end-users who may not be experienced with working with r ...
... The ability to learn from imitation would allow a robotic agent to learn skills quickly, while enabling the human teacher to convey the skill more intuitively. One focus of Human-Robot Interaction research is to enable robots to interface with end-users who may not be experienced with working with r ...