Human Implications of Human-Robot Interaction AAAI Press Papers from the AAAI Workshop
... AAAI maintains compilation copyright for this technical report and retains the right of first refusal to any publication (including electronic distribution) arising from this AAAI event. Please do not make any inquiries or arrangements for hardcopy or electronic publication of all or part of the pap ...
... AAAI maintains compilation copyright for this technical report and retains the right of first refusal to any publication (including electronic distribution) arising from this AAAI event. Please do not make any inquiries or arrangements for hardcopy or electronic publication of all or part of the pap ...

Planning for a Mobile Robot to Attend a Conference
... Metric-FF and SHOP2, which do not support them, we introduced a metric time variable. Because we need a fast reactive planning engine, plan solutions taking more than two minutes were rejected. ...
... Metric-FF and SHOP2, which do not support them, we introduced a metric time variable. Because we need a fast reactive planning engine, plan solutions taking more than two minutes were rejected. ...
Reasoning robot, involved tasks/modules and robot world
... Symbols are manipulated according to rules that are based on the symbols’ shapes, not their meanings. ...
... Symbols are manipulated according to rules that are based on the symbols’ shapes, not their meanings. ...

Learning Concepts by Interaction
... Mobile Robot. To appear at The Sixteenth International Joint Conference on Artificial Intelligence. [2] Rosenstein, M and Cohen P.. 1999. Continuous Categories for a Mobile Robot. To appear at The Sixteenth National Conference on Artificial Intelligence. ...
... Mobile Robot. To appear at The Sixteenth International Joint Conference on Artificial Intelligence. [2] Rosenstein, M and Cohen P.. 1999. Continuous Categories for a Mobile Robot. To appear at The Sixteenth National Conference on Artificial Intelligence. ...

Today, the usage of artificial intelligence in military
... Elon Musk, CEO of Tesla which is an American automotive and energy storage company is at the same side as Bostrom. He, through his account Twitter has shown his concern towards this issue by urging the society to be extra careful with AI because it has the potential to be more perilous than nukes. R ...
... Elon Musk, CEO of Tesla which is an American automotive and energy storage company is at the same side as Bostrom. He, through his account Twitter has shown his concern towards this issue by urging the society to be extra careful with AI because it has the potential to be more perilous than nukes. R ...

Intelligent Robot Based on Synaptic Plasticity Web Site: www.ijaiem.org Email:
... Similarly, in our work we first show that shining light in front of and or behind the robot elicits no response but pressing the push button causes the robot to move forward or backward. We then press the button while shining the light on the robot and the neural network programmed into the robot ca ...
... Similarly, in our work we first show that shining light in front of and or behind the robot elicits no response but pressing the push button causes the robot to move forward or backward. We then press the button while shining the light on the robot and the neural network programmed into the robot ca ...
Making Robots and Making Robots Intelligent
... • Introduction to Robotics • Intelligence through feedback control • Success requires modeling ==> which requires math • You will be Intelligence Engineers! • Overview of the next 4 weeks • What we won’t cover ...
... • Introduction to Robotics • Intelligence through feedback control • Success requires modeling ==> which requires math • You will be Intelligence Engineers! • Overview of the next 4 weeks • What we won’t cover ...

Machine Ethics, the Frame Problem, and Theory of Mind
... to add? What if the red tower were occluded and immediately behind another tower? What if knocking down an adjacent tower would cause it to topple into the red tower? ...
... to add? What if the red tower were occluded and immediately behind another tower? What if knocking down an adjacent tower would cause it to topple into the red tower? ...

Towards a theory of Hybrid Intelligent Autonomous Systems
... position of the next object and the required task must be determined. This can vary unpredictably at least from the robots point of view. One important area of robotics research is to enable the robot to cope with its environment whether this is on land, underwater, in the air, underground, or in sp ...
... position of the next object and the required task must be determined. This can vary unpredictably at least from the robots point of view. One important area of robotics research is to enable the robot to cope with its environment whether this is on land, underwater, in the air, underground, or in sp ...

fitzpatrick2
... by considering combinations of existing percepts, when heuristics suggest that such combinations may be fruitful. There are three categories of combinations :. Conjunctions: if two percepts are noted to occur frequently together, and rarely occur without each other, a composite percept called their ...
... by considering combinations of existing percepts, when heuristics suggest that such combinations may be fruitful. There are three categories of combinations :. Conjunctions: if two percepts are noted to occur frequently together, and rarely occur without each other, a composite percept called their ...

Applying a natural intelligence pattern in cognitive robots
... state anxiety or tension. So, ‘id’ tries to resolve this tension created by the pleasure principle through the primary process, which means learning to find a suitable method to satisfy the needs. Based on this description, cognitive robots start moving in their surroundings at first, and as their e ...
... state anxiety or tension. So, ‘id’ tries to resolve this tension created by the pleasure principle through the primary process, which means learning to find a suitable method to satisfy the needs. Based on this description, cognitive robots start moving in their surroundings at first, and as their e ...

Intelligent Robotics and Multi-Agent Systems
... Multi-agent systems (MAS) are groups of intelligent agents that can perceive and act in a given environment to achieve their individual and collective goals. MAS enable solving problems that are beyond the individual capabilities and knowledge of single agents, not suffering from resource limitation ...
... Multi-agent systems (MAS) are groups of intelligent agents that can perceive and act in a given environment to achieve their individual and collective goals. MAS enable solving problems that are beyond the individual capabilities and knowledge of single agents, not suffering from resource limitation ...

Artificial Neural Networks For Spatial Perception
... estimation, prediction and learning is needed. Spatial perception, that is the detection and localisation of objects in the scene, has recently been of increased interest in robotics. This localisation is needed for on-line motion planning, obstacle avoidance, and object manipulation. While various ...
... estimation, prediction and learning is needed. Spatial perception, that is the detection and localisation of objects in the scene, has recently been of increased interest in robotics. This localisation is needed for on-line motion planning, obstacle avoidance, and object manipulation. While various ...

MIT mobile robots-what`s next? - Cooperative Robotics Research
... goal of our research is to make robots more useful t o society. This can b e achieved by making robots widely available t o large segments of the population. Lowering costs for a given level of intelligence is one way t o increase availability. We have developed two strategies for achieving these go ...
... goal of our research is to make robots more useful t o society. This can b e achieved by making robots widely available t o large segments of the population. Lowering costs for a given level of intelligence is one way t o increase availability. We have developed two strategies for achieving these go ...

Potential Fields - UTK-EECS
... Potential Field Path Planning • Robot is treated as a point under the influence of an artificial potential field. – Generated robot movement is similar to a ball rolling down the hill – Goal generates attractive force – Obstacles are repulsive forces ...
... Potential Field Path Planning • Robot is treated as a point under the influence of an artificial potential field. – Generated robot movement is similar to a ball rolling down the hill – Goal generates attractive force – Obstacles are repulsive forces ...
How to keep robot/AI under control?
... contradiction, in that many of our human actions are animalistic at their core. They are not intelligent acts. We have similar behaviours to primates for example. So for the rising intelligence of robots, they must become less human. The control of highly intelligent robots has been considered a maj ...
... contradiction, in that many of our human actions are animalistic at their core. They are not intelligent acts. We have similar behaviours to primates for example. So for the rising intelligence of robots, they must become less human. The control of highly intelligent robots has been considered a maj ...

How engineeRing caRRied out tHe PRoject
... We start with a definition of robot in order to understand which are legitimate robotics’ objectives. Then it is provided an outline of new robot generations and their industrial and biomedical applications. We consider the consequences of this new kind of technology on the notion of intelligence, s ...
... We start with a definition of robot in order to understand which are legitimate robotics’ objectives. Then it is provided an outline of new robot generations and their industrial and biomedical applications. We consider the consequences of this new kind of technology on the notion of intelligence, s ...
Robot soccer competitions. Learn about 2002 year class project. In
... BEFORE (cf. Star Trek) Formalised Testbed ...
... BEFORE (cf. Star Trek) Formalised Testbed ...
The 2004 Mobile Robot Competition and Exhibition
... encourage and showcase research in robot-human interaction and operations in typical human environments. The goal of the Robot Challenge is to design a robot system that can fully participate in the AAAI conference by registering, navigating around the conference hall using natural landmarks and hum ...
... encourage and showcase research in robot-human interaction and operations in typical human environments. The goal of the Robot Challenge is to design a robot system that can fully participate in the AAAI conference by registering, navigating around the conference hall using natural landmarks and hum ...
Introduction - Computer Science & Engineering
... Robots) – It is (most likely) a combination of “rabota” (obligatory work) and “robotnik” (serf) ...
... Robots) – It is (most likely) a combination of “rabota” (obligatory work) and “robotnik” (serf) ...

View PDF - Advances in Cognitive Systems
... An example of state-of-the-art robot technology is Google’s self-driving car (Thrun & Urmson, 2011). This is capable of the remarkable feat of driving safely in urban traffic, but to do so requires careful preparation. For example, prior to autonomous driving, the car must be driven around a locatio ...
... An example of state-of-the-art robot technology is Google’s self-driving car (Thrun & Urmson, 2011). This is capable of the remarkable feat of driving safely in urban traffic, but to do so requires careful preparation. For example, prior to autonomous driving, the car must be driven around a locatio ...

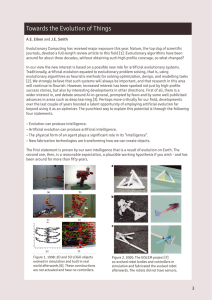
Towards the Evolution of Things
... [2]. We strongly believe that such systems will always be important, and that research in this area will continue to flourish. However, increased interest has been sparked not just by high-profile success stories, but also by interesting developments in other directions. First of all, there is a wid ...
... [2]. We strongly believe that such systems will always be important, and that research in this area will continue to flourish. However, increased interest has been sparked not just by high-profile success stories, but also by interesting developments in other directions. First of all, there is a wid ...

The Eastern Construction of the Artificial Mind
... game of chess, grammatical and semantic uses will often lead us to dead-ends. In this sense, there is no Eastern thought and Western thought, but merely Universal human thought. After the initial psychological interest of James in Buddhism, there was no further major approach until the end on 20 th ...
... game of chess, grammatical and semantic uses will often lead us to dead-ends. In this sense, there is no Eastern thought and Western thought, but merely Universal human thought. After the initial psychological interest of James in Buddhism, there was no further major approach until the end on 20 th ...