
Artificial Intelligence and Robotics
... agent is actually deferring the job of dealing with those conditions until they actually arise. The two approaches of course can be combined by planning for some contingencies and leaving others to be dealt with later if they occur. ...
... agent is actually deferring the job of dealing with those conditions until they actually arise. The two approaches of course can be combined by planning for some contingencies and leaving others to be dealt with later if they occur. ...

Artificial Intelligence
... The idea of artificial intelligence goes back very far in the history of humans. The ancient Greeks themselves thought about how humans might be able to recreate themselves. In Jewish folklore, people also thought about something called a golem which is “an animated being created entirely from inani ...
... The idea of artificial intelligence goes back very far in the history of humans. The ancient Greeks themselves thought about how humans might be able to recreate themselves. In Jewish folklore, people also thought about something called a golem which is “an animated being created entirely from inani ...

Artificial intelligence - Pérez
... Do you share the concerns that Professor Stephen Hawking (“The development of full artificial intelligence could spell the end of the human race”) and IT entrepreneur Elon Musk have expressed over AI? Why or why not? How can lawyers and regulators play a role in reducing these dangers? I do not thin ...
... Do you share the concerns that Professor Stephen Hawking (“The development of full artificial intelligence could spell the end of the human race”) and IT entrepreneur Elon Musk have expressed over AI? Why or why not? How can lawyers and regulators play a role in reducing these dangers? I do not thin ...

the first of a series of anthropomimetic musculoskeletal upper torsos
... The joints of humanoid robots usually have clearly identifiable axes of rotation. From the classical control point of view this allows their motion to be dealt with in a tractable mathematical framework. However, the human body has joints which do not match this description. For example, the shoulde ...
... The joints of humanoid robots usually have clearly identifiable axes of rotation. From the classical control point of view this allows their motion to be dealt with in a tractable mathematical framework. However, the human body has joints which do not match this description. For example, the shoulde ...

Yale University “Imagine that you work for a computer company. You
... engineers and designers could not always predict what these systems would do when the robots encountered new situations with new inputs. Some basic evaluation of moral considerations by the robots would be necessary to ensure that their actions did not cause harm to humans or other entities worthy o ...
... engineers and designers could not always predict what these systems would do when the robots encountered new situations with new inputs. Some basic evaluation of moral considerations by the robots would be necessary to ensure that their actions did not cause harm to humans or other entities worthy o ...
The 2000 AAAI Mobile Robot Competition and Exhibition
... required to explicitly and unambiguously demonstrate interaction with the spectators. The fourth year for this popular event, the robots are judged while they serve finger foods to attendees at the AI Festival. Unlike other contests over the years, there were no artificial walls or constraints in th ...
... required to explicitly and unambiguously demonstrate interaction with the spectators. The fourth year for this popular event, the robots are judged while they serve finger foods to attendees at the AI Festival. Unlike other contests over the years, there were no artificial walls or constraints in th ...
Proposal_4
... machines; and many more. Some common element of all these systems is the integration of analog and digital circuits, microprocessors and computers, mechanical devices, sensors, actuators, and controls. While there is no standard definition for robots, several attempts have been made in the past in t ...
... machines; and many more. Some common element of all these systems is the integration of analog and digital circuits, microprocessors and computers, mechanical devices, sensors, actuators, and controls. While there is no standard definition for robots, several attempts have been made in the past in t ...

A Novel Method for Developing Robotics via Artificial Intelligence
... The truck was invented in eighteenth centuries. So we can say making robots using artificial intelligence is old one. The truck is a chess playing robot. Robotics are based on two enabling technologies: Telemanipulators and the ability of numerical control of machines. Telemanipulators are remotely ...
... The truck was invented in eighteenth centuries. So we can say making robots using artificial intelligence is old one. The truck is a chess playing robot. Robotics are based on two enabling technologies: Telemanipulators and the ability of numerical control of machines. Telemanipulators are remotely ...

Building Like Animals: Using Autonomous Robots to
... agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators." [4] The purpose of such agents is not in replacing people but in being better, at least in some aspects, than biological systems, projecting human capabilities into ...
... agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators." [4] The purpose of such agents is not in replacing people but in being better, at least in some aspects, than biological systems, projecting human capabilities into ...

What is intelligence?
... • What is intelligence? – Learn or understand from experience – Respond quickly and successfully to new situations – Use reasoning (推論) to solve problems – Understand and Infer in ordinary, rational ways – Apply knowledge to manipulate (處理) the environment – Recognize the relative importance of diff ...
... • What is intelligence? – Learn or understand from experience – Respond quickly and successfully to new situations – Use reasoning (推論) to solve problems – Understand and Infer in ordinary, rational ways – Apply knowledge to manipulate (處理) the environment – Recognize the relative importance of diff ...
Slides - CSE IITK
... Interaction” by Dzmitry Tsetserukou, Naoki Kawakami, Susumu Tachi “The advantages of mounting a camera on robot arm” by Radu Horaud, Roger Mohr, Fadi Dornaika, and Boubakeur Boufama In 2006 IEEE Intl. Conference on Robotics and Automation (ICRA 2006), Orlando, FL, May 2006 “Robot Navigation Usin ...
... Interaction” by Dzmitry Tsetserukou, Naoki Kawakami, Susumu Tachi “The advantages of mounting a camera on robot arm” by Radu Horaud, Roger Mohr, Fadi Dornaika, and Boubakeur Boufama In 2006 IEEE Intl. Conference on Robotics and Automation (ICRA 2006), Orlando, FL, May 2006 “Robot Navigation Usin ...
robot - kmutt-inc
... Karel Capek’s 1921 play RUR (Rossum’s Universal Robots) มาจากคาว่ า “rabota” (obligatory work) ...
... Karel Capek’s 1921 play RUR (Rossum’s Universal Robots) มาจากคาว่ า “rabota” (obligatory work) ...

From Imitation Learning to Innovation in Designing - Neuron
... Learning tasks from demonstrations offers a convenient mechanism to customize and train a robot by transferring task related knowledge from a user to a robot. This avoids the time— consuming and complex process of manual programming. The way in which the user interacts with a robot during a demonstr ...
... Learning tasks from demonstrations offers a convenient mechanism to customize and train a robot by transferring task related knowledge from a user to a robot. This avoids the time— consuming and complex process of manual programming. The way in which the user interacts with a robot during a demonstr ...

Cognitive robotics in JOURNAL OF EXPERIMENTAL
... For the past decade, robotics has mostly focused on low-level sensing and control tasks such as sensor fusion, path planning, and manipulator design and control. At the same time the field of Cognitive Robotics made significant progress in equipping robots and software agents with high-level cogniti ...
... For the past decade, robotics has mostly focused on low-level sensing and control tasks such as sensor fusion, path planning, and manipulator design and control. At the same time the field of Cognitive Robotics made significant progress in equipping robots and software agents with high-level cogniti ...
Introduction to Swarm Robotics
... [31] N. Muscettola, G. Dorais, C. Fry, R. Levinson, C. Plaunt, “IDEA: Planning at the Core of Autonomous Reactive Agents”, Proceedings of the 3rd International NASA Workshop on Planning and Scheduling for Space, 2002. [32] M. Yim, "Locomotion Gaits with Polypod", Proceedings of the IEEE Internationa ...
... [31] N. Muscettola, G. Dorais, C. Fry, R. Levinson, C. Plaunt, “IDEA: Planning at the Core of Autonomous Reactive Agents”, Proceedings of the 3rd International NASA Workshop on Planning and Scheduling for Space, 2002. [32] M. Yim, "Locomotion Gaits with Polypod", Proceedings of the IEEE Internationa ...
robotics - Suraj @ LUMS
... scientist and writer Isaac Asimov (born Jan. 2, 1920, died Apr. 6, 1992). Asimov wrote prodigiously on a wide variety of subjects. He was best known for his many works of science fiction. ...
... scientist and writer Isaac Asimov (born Jan. 2, 1920, died Apr. 6, 1992). Asimov wrote prodigiously on a wide variety of subjects. He was best known for his many works of science fiction. ...

PDF
... work in human environments", Intl. Joint Conf. on Artificial Intelligence (IJCAI'11), Barcelona, pp. 2386-2391. [2] Alenyà G., Dellen B. & Torras C. (2011): “3D modelling of leaves from color and ToF data for robotized plant measuring”. IEEE Intl. Conf. on Robotics and Automation (ICRA’11), Shanghai ...
... work in human environments", Intl. Joint Conf. on Artificial Intelligence (IJCAI'11), Barcelona, pp. 2386-2391. [2] Alenyà G., Dellen B. & Torras C. (2011): “3D modelling of leaves from color and ToF data for robotized plant measuring”. IEEE Intl. Conf. on Robotics and Automation (ICRA’11), Shanghai ...

A Survey on Artificial Intelligence and Robotics
... The field of artificial intelligence gives the ability to the machines to think analytically, using concepts. Tremendous contribution to the various areas has been made by the AI techniques from the last 2 decades. AI will continue to play an increasingly important role in the various fields. Autono ...
... The field of artificial intelligence gives the ability to the machines to think analytically, using concepts. Tremendous contribution to the various areas has been made by the AI techniques from the last 2 decades. AI will continue to play an increasingly important role in the various fields. Autono ...

concept of artificial intelligence in various application of robotics
... These DOFs define the kinematic state of the robot. This can be extended with another dimension that gives the rate of change of each kinematic dimension. This is called dynamic state. Robots with non rigid bodies may have additional DOFs. For example a human wrist has three degrees of freedom – it ...
... These DOFs define the kinematic state of the robot. This can be extended with another dimension that gives the rate of change of each kinematic dimension. This is called dynamic state. Robots with non rigid bodies may have additional DOFs. For example a human wrist has three degrees of freedom – it ...
Poster title - Tarleton State University
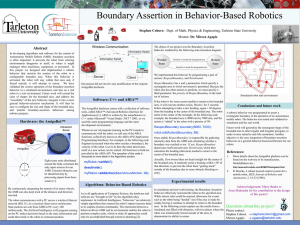
... behavior that restricts the motion of the robot to a configurable bounded area. When this behavior is activated, the robot will stay within that area and, if forced outside, it will attempt to return. We have validated the correct operation of the boundary-assertion behavior in a simulated environme ...
... behavior that restricts the motion of the robot to a configurable bounded area. When this behavior is activated, the robot will stay within that area and, if forced outside, it will attempt to return. We have validated the correct operation of the boundary-assertion behavior in a simulated environme ...
File - Justine Faith M. Tabligan
... he had defects that he started acting differently. He has always been nice and friendly but after the incident, he started doing what he wanted to do. This showed that he has freewill and started making his own decisions. Second, computers can already solve problems in limited realms. The basic idea ...
... he had defects that he started acting differently. He has always been nice and friendly but after the incident, he started doing what he wanted to do. This showed that he has freewill and started making his own decisions. Second, computers can already solve problems in limited realms. The basic idea ...
Source Sheet, #5
... and punishment will not be sufficient to cause all superhuman AIs to cooperate.” Because our laws and vodes of conduct mean nothing to robots, they have no reason to abide by them. As completely different entities, we must find a way to control the machines. “The Artificial Intelligence Confinement ...
... and punishment will not be sufficient to cause all superhuman AIs to cooperate.” Because our laws and vodes of conduct mean nothing to robots, they have no reason to abide by them. As completely different entities, we must find a way to control the machines. “The Artificial Intelligence Confinement ...

Explaining robot actions - Advanced Technology Laboratories
... proof-of-concept experiments have shown the merits of this, future work includes: 1. Supporting more specific answers. Thus far, the responses from the ERA system have focused primarily on the robot’s mode and world information. We have developed but not implemented algorithms that examine changes i ...
... proof-of-concept experiments have shown the merits of this, future work includes: 1. Supporting more specific answers. Thus far, the responses from the ERA system have focused primarily on the robot’s mode and world information. We have developed but not implemented algorithms that examine changes i ...

Artificial Intelligence
... also eliminates the danger of distracted driving and boasts a reaction time much faster than that of any human. ...
... also eliminates the danger of distracted driving and boasts a reaction time much faster than that of any human. ...

Human action recognition oriented to humanoid - CEUR
... millennium, the “human” factor pushes robots to rapidly assume anthropomorphic appearance and the more robots interact with people safer, smarter and more independent they need to be, that why other disciplines were involved in the robotics area. The human ability to imitate behaviors is already pre ...
... millennium, the “human” factor pushes robots to rapidly assume anthropomorphic appearance and the more robots interact with people safer, smarter and more independent they need to be, that why other disciplines were involved in the robotics area. The human ability to imitate behaviors is already pre ...