
A framework for making sophisticated robotics accessible
... useful first step, but are now becoming a dead-end because they do not allow our students to explore more sophisticated robotics methods. We suggest that it is time to shift our focus from low-cost robots to creating software tools with the right kinds of abstractions that will make it easier for ou ...
... useful first step, but are now becoming a dead-end because they do not allow our students to explore more sophisticated robotics methods. We suggest that it is time to shift our focus from low-cost robots to creating software tools with the right kinds of abstractions that will make it easier for ou ...
Non-Traditional Projects in the Undergraduate AI Course
... for both software development (especially suitable for difficult-toprogram applications or for customizing software) and building intelligent software (i.e., a tool for AI programming). Our projects emphasize the relationship between AI and computer science in general, and software development in pa ...
... for both software development (especially suitable for difficult-toprogram applications or for customizing software) and building intelligent software (i.e., a tool for AI programming). Our projects emphasize the relationship between AI and computer science in general, and software development in pa ...

Controlling a mobile robot with Visual Prolog 7
... PDC forum and on Visual Prolog Wiki. The program is easy to apply and has a convenient GUI for setting all the parameters. The program makes it possible to send and receive bytes via RS-232 interface and process communicstion events. A declarative system for the robot was added to this program. To m ...
... PDC forum and on Visual Prolog Wiki. The program is easy to apply and has a convenient GUI for setting all the parameters. The program makes it possible to send and receive bytes via RS-232 interface and process communicstion events. A declarative system for the robot was added to this program. To m ...
news summary (44) - Quest Group`s Blog
... When the pilot acts, those actions move the robot,” says Geordie Rose, who is a cofounder and the CEO of Kindred, and who previously cofounded D-Wave. “This allows us to show robots how to act like people. Humans aren't the fastest or best at all aspects of robot control, like putting things in spec ...
... When the pilot acts, those actions move the robot,” says Geordie Rose, who is a cofounder and the CEO of Kindred, and who previously cofounded D-Wave. “This allows us to show robots how to act like people. Humans aren't the fastest or best at all aspects of robot control, like putting things in spec ...

Dance Choreography Design of Humanoid Robots using Interactive
... the Kyoto University apply a method called intermodality mapping to generate robot motion from various sounds and also to generate sounds from motions using the back-propagation through-time algorithm. Other approach from Tokyo University is using Chaos to trade synchronization and autonomy in a dan ...
... the Kyoto University apply a method called intermodality mapping to generate robot motion from various sounds and also to generate sounds from motions using the back-propagation through-time algorithm. Other approach from Tokyo University is using Chaos to trade synchronization and autonomy in a dan ...
side event briefings - Campaign to Stop Killer Robots
... Explosive Weapons. As Cluster Munition Coalition coordinator from 2004 to 2011, he helped secure the 2008 Convention on Cluster Munitions. In 2014, Article 36 launched a pledge since signed by more than 50 individuals committing not participate in all-male panels on disarmament and security topics. ...
... Explosive Weapons. As Cluster Munition Coalition coordinator from 2004 to 2011, he helped secure the 2008 Convention on Cluster Munitions. In 2014, Article 36 launched a pledge since signed by more than 50 individuals committing not participate in all-male panels on disarmament and security topics. ...
File - Operating In The Robotic Matrix
... Every year, robotic design changes and we find new uses for robots. Will there be a time when robots will complete all physical labor for humans and humans will not be required to work? ...
... Every year, robotic design changes and we find new uses for robots. Will there be a time when robots will complete all physical labor for humans and humans will not be required to work? ...

Bibliography
... Small Robot, Tech. Rep. UCLA-CRSP-94-01, Department of Cognitive Science, UCLA, 1994 [25] Miglino, O., Lund, H.H., and Nolfi, S. Evolving Mobile Robots in Simulated and Real Environments, Artificial Life, 2, pp. 417-434, 1996 [26] Moriarty, D. E. and Miikkulainen, R. Evolving obstacle avoidance beha ...
... Small Robot, Tech. Rep. UCLA-CRSP-94-01, Department of Cognitive Science, UCLA, 1994 [25] Miglino, O., Lund, H.H., and Nolfi, S. Evolving Mobile Robots in Simulated and Real Environments, Artificial Life, 2, pp. 417-434, 1996 [26] Moriarty, D. E. and Miikkulainen, R. Evolving obstacle avoidance beha ...
Introduction autonomous mobile systems and AI planning
... • Technique for tightly coupling perception and action to provide fast responses to changing, unstructured environments • Collection of stimulus-response rules ...
... • Technique for tightly coupling perception and action to provide fast responses to changing, unstructured environments • Collection of stimulus-response rules ...

PDF
... added to the planning domain or preconditions of existing methods might be changed while the implementation of operators can be fixed. In the first two years of the RACE project an off-the-shelf HTN planner has been used. Since this imposes several limitations, ongoing work will be presented of a hi ...
... added to the planning domain or preconditions of existing methods might be changed while the implementation of operators can be fixed. In the first two years of the RACE project an off-the-shelf HTN planner has been used. Since this imposes several limitations, ongoing work will be presented of a hi ...
Artificial Intelligence
... a human can talk to a computer, be understood and get a response in the same way that they would from another human. We will examine some of the attempts to create programs that could hold a conversation with humans. Language processing can be divided into two tasks: 1. Processing spoken language: i ...
... a human can talk to a computer, be understood and get a response in the same way that they would from another human. We will examine some of the attempts to create programs that could hold a conversation with humans. Language processing can be divided into two tasks: 1. Processing spoken language: i ...
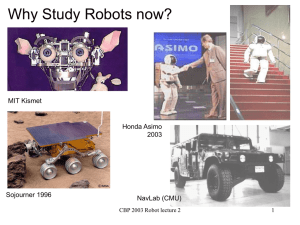
Comp 1017 Robots
... CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...
... CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...

Moral and ethical questions for robotics public policy
... come to humans from robots), rather than concern for ethical treatment of robots and involve the use of additional sensors, and requirements for softer construction materials to limit human injury (6). Christensen notes that Japan will require supplemental shut-off mechanisms for robots, which are e ...
... come to humans from robots), rather than concern for ethical treatment of robots and involve the use of additional sensors, and requirements for softer construction materials to limit human injury (6). Christensen notes that Japan will require supplemental shut-off mechanisms for robots, which are e ...
Do robots equal humans? Anthropomorphic terminology in LAWS
... anthropomorphisation of military robots may be too risky to be accepted, an issue which has already been raised during the debate on LAWS [1, 5, 6]. The reasons why we should avoid anthropomorphism in this particular context include the following: a) Misleading framework of interpretation: Human cha ...
... anthropomorphisation of military robots may be too risky to be accepted, an issue which has already been raised during the debate on LAWS [1, 5, 6]. The reasons why we should avoid anthropomorphism in this particular context include the following: a) Misleading framework of interpretation: Human cha ...
Term Project Color and Illumination Independent Landmark
... • Image labeling process that has been used in color segmentation-based approach is replaced with region labeling in which the landmarks and their immediate surrounding are covered – The robot is placed at a location where it can see the landmark, and then a region is selected around the landmark to ...
... • Image labeling process that has been used in color segmentation-based approach is replaced with region labeling in which the landmarks and their immediate surrounding are covered – The robot is placed at a location where it can see the landmark, and then a region is selected around the landmark to ...

Developing Effective Robot Teammates for Human
... Developing collaborative robots that can productively operate out of isolation and work safely in uninstrumented, human-populated environments is critically important for advancing the field of robotics. The development of such systems, those that handle the dynamics of human environments and the co ...
... Developing collaborative robots that can productively operate out of isolation and work safely in uninstrumented, human-populated environments is critically important for advancing the field of robotics. The development of such systems, those that handle the dynamics of human environments and the co ...
Mobile Robotics
... • cannot use relative positions as defined in one subsystem in another – can lead to bottlenecks in processing – asynchronous nature of blackboards can lead to problems due to timing skews – difficulties arise if more than one module can change data in the pool … which set of data is the right one? ...
... • cannot use relative positions as defined in one subsystem in another – can lead to bottlenecks in processing – asynchronous nature of blackboards can lead to problems due to timing skews – difficulties arise if more than one module can change data in the pool … which set of data is the right one? ...
AMAM Conference 2005
... [ishiguro03] A. Ishiguro, T. Kawakatsu, How should control and body systems be ...
... [ishiguro03] A. Ishiguro, T. Kawakatsu, How should control and body systems be ...
2008 Artificial Intelligence Conference 3
... • teaching foreign language and culture to military personnel prior to deployment, and more. Invited Speakers This year’s invited speakers present significant work in an array of areas such as research in creating ensembles of cooperating submillimeter robots that together form dynamic 3D physical o ...
... • teaching foreign language and culture to military personnel prior to deployment, and more. Invited Speakers This year’s invited speakers present significant work in an array of areas such as research in creating ensembles of cooperating submillimeter robots that together form dynamic 3D physical o ...

Building a multimodal human-robot interface
... additional information through the oneword utterance “What?” Whenever the system obtains a grammatical utterance, the appropriateness/need filter checks the resulting representation against any perceived gesture. The filter checks the appropriateness of various gestures with the perceived utterance ...
... additional information through the oneword utterance “What?” Whenever the system obtains a grammatical utterance, the appropriateness/need filter checks the resulting representation against any perceived gesture. The filter checks the appropriateness of various gestures with the perceived utterance ...
1.5 Impact of emerging technologies
... (able to make decisions typically made by a human). • The PR2 robot is being programmed to complete a number of specific tasks just like a human. • Deep Blue was a chess-playing computer developed by IBM. It is known for being the first piece of artificial intelligence to win both a chess game again ...
... (able to make decisions typically made by a human). • The PR2 robot is being programmed to complete a number of specific tasks just like a human. • Deep Blue was a chess-playing computer developed by IBM. It is known for being the first piece of artificial intelligence to win both a chess game again ...

Developing Effective Robot Teammates for Human
... Developing collaborative robots that can productively operate out of isolation and work safely in uninstrumented, human-populated environments is critically important for advancing the field of robotics. The development of such systems, those that handle the dynamics of human environments and the co ...
... Developing collaborative robots that can productively operate out of isolation and work safely in uninstrumented, human-populated environments is critically important for advancing the field of robotics. The development of such systems, those that handle the dynamics of human environments and the co ...
25-Concepts - My FIT (my.fit.edu)
... • Definition from the “Robot Institute of America” (fits a conveyor belt) A robot is a programmable, multifunction manipulator design to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks. ...
... • Definition from the “Robot Institute of America” (fits a conveyor belt) A robot is a programmable, multifunction manipulator design to move material, parts, tools, or specific devices through variable programmed motions for the performance of a variety of tasks. ...
Operating in the Robot Matrix
... have discovers a new planet, named Kryla. Your mission should you choose to accept it, is to build, design, and program your robot so that it can navigate through the rough terrain of the planet and collect samples. You will then place those samples on top of the collection capsule. Are you ready to ...
... have discovers a new planet, named Kryla. Your mission should you choose to accept it, is to build, design, and program your robot so that it can navigate through the rough terrain of the planet and collect samples. You will then place those samples on top of the collection capsule. Are you ready to ...
Use of robots in healthcare
... needed to obtain information from the environment. Reactive behaviors (like the stretch reflex in humans) do not require any deep cognitive ability, but on-board intelligence is necessary if the robot is to perform significant tasks autonomously, and actuation is needed to enable the robot to exert ...
... needed to obtain information from the environment. Reactive behaviors (like the stretch reflex in humans) do not require any deep cognitive ability, but on-board intelligence is necessary if the robot is to perform significant tasks autonomously, and actuation is needed to enable the robot to exert ...