
Tips for choosing high-accuracy linear positioning
... cocking. Because the bearing system constrains the slide tightly, cocking would produce increased friction, wear, and load-position inaccuracy. An alternative method uses a gantry style system with two drives, one on each side of the slide. The resulting drive force ...
... cocking. Because the bearing system constrains the slide tightly, cocking would produce increased friction, wear, and load-position inaccuracy. An alternative method uses a gantry style system with two drives, one on each side of the slide. The resulting drive force ...


P7B Mechanical Specifications Submittal
... AC drive. Three-phase input line power is converted to a sine-coded, variable frequency output, which provides optimum speed control of any conventional squirrel cage induction motor. The use of IGBTs (Insulated Gate Bipolar Transistors), with a carrier frequency range of 2.0 kHz to 15 kHz, permits ...
... AC drive. Three-phase input line power is converted to a sine-coded, variable frequency output, which provides optimum speed control of any conventional squirrel cage induction motor. The use of IGBTs (Insulated Gate Bipolar Transistors), with a carrier frequency range of 2.0 kHz to 15 kHz, permits ...



Primary and Secondary Frequency Control of Synchronous Machines
... Figures 2, 3 and 4 show the control schemes of the controllers included in the data file wscc reg.dm, namely, the turbine governor, the automatic voltage regulator and the AGC. ...
... Figures 2, 3 and 4 show the control schemes of the controllers included in the data file wscc reg.dm, namely, the turbine governor, the automatic voltage regulator and the AGC. ...
PS-LED-PC-277V Cutsheet
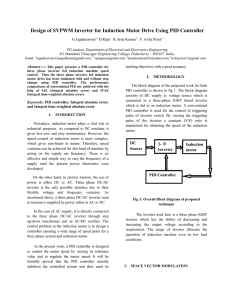
... The HUNT PS-LED-PC LED dimmer has a maximum control wattage of 600W, and a maximum input current of 2.2 amps in a single-gang application, which must include both LED driver and lamp loads as well as a derating factor to account for the LED driver in-rush current. Minimum loads are required for prop ...
... The HUNT PS-LED-PC LED dimmer has a maximum control wattage of 600W, and a maximum input current of 2.2 amps in a single-gang application, which must include both LED driver and lamp loads as well as a derating factor to account for the LED driver in-rush current. Minimum loads are required for prop ...


Sample project proposal - Ghassan Salim
... hollow steel sphere at a desired vertical position. Suspension disturbances are accounted for in the controller design. The desired and actual ball position are compared and an error signal is generated for proper control action. The actual ball position is detected using photo emitter/detector cell ...
... hollow steel sphere at a desired vertical position. Suspension disturbances are accounted for in the controller design. The desired and actual ball position are compared and an error signal is generated for proper control action. The actual ball position is detected using photo emitter/detector cell ...

Design of SVPWM Inverter for Induction Motor Drive Using
... error) and ITAE (Integral time-weighted absolute error). The IAE and ITAE value of PID controller for induction motor drive is shown in the table below. The performance measurement is shown in table 1. Table: 1 performance measurement of PID ...
... error) and ITAE (Integral time-weighted absolute error). The IAE and ITAE value of PID controller for induction motor drive is shown in the table below. The performance measurement is shown in table 1. Table: 1 performance measurement of PID ...


Proportional Control
... In practice the operation of a proportional controller is often limited as the output of the heating system is limited (i.e. it has a maximum capacity). This is achieved by introducing a 'proportional band' or 'throttling range'—this is similar to a dead band in that a single set-point is replaced b ...
... In practice the operation of a proportional controller is often limited as the output of the heating system is limited (i.e. it has a maximum capacity). This is achieved by introducing a 'proportional band' or 'throttling range'—this is similar to a dead band in that a single set-point is replaced b ...
Multi-functional Packaged Antennas for Next
... For IC op amps made of JFETs open-loop input impedance is about 1012 W Open loop output impedance is between 1 and 100 W Closed loop impedances will be different, and can be chosen by proper resistors ...
... For IC op amps made of JFETs open-loop input impedance is about 1012 W Open loop output impedance is between 1 and 100 W Closed loop impedances will be different, and can be chosen by proper resistors ...

TC-6100 Cybertronic Temp Controller
... used with M100G actuators in air or liquid-flow systems. It may also be used with the EP-8000 Electro-Pneumatic Transducer or any other device which operates on a 1 to 18 VDC control signal. The TC-6100 has both direct and reverse acting outputs with separate direct and reverse acting bandwidth sett ...
... used with M100G actuators in air or liquid-flow systems. It may also be used with the EP-8000 Electro-Pneumatic Transducer or any other device which operates on a 1 to 18 VDC control signal. The TC-6100 has both direct and reverse acting outputs with separate direct and reverse acting bandwidth sett ...





AMC6821 E2E Question
... still run properly even after I2C communication is terminated. Any help would be greatly appreciated. ...
... still run properly even after I2C communication is terminated. Any help would be greatly appreciated. ...
CARDIOVASCULAR SIMULATOR
... The other controlled parameters are set similarly, but with different values for τ, γ, the weighting function h[k], and the nominal parameter value setpoint. The gain values for heart rate and peripheral resistance were obtained from DeBoer [2], whereas contractility and venous tone gains were calcu ...
... The other controlled parameters are set similarly, but with different values for τ, γ, the weighting function h[k], and the nominal parameter value setpoint. The gain values for heart rate and peripheral resistance were obtained from DeBoer [2], whereas contractility and venous tone gains were calcu ...

Chemical - New Jersey Invasive Species Strike Team
... For Foliar Spray- use a surfactant (not necessary for other techniques) For any technique- dye is helpful for tracking Triple rinse containers after use (1/4 full), drill holes in bottom for disposal Be prepared for spills & drips ...
... For Foliar Spray- use a surfactant (not necessary for other techniques) For any technique- dye is helpful for tracking Triple rinse containers after use (1/4 full), drill holes in bottom for disposal Be prepared for spills & drips ...

IJIREEICE 34
... One of the most significant features of the sliding mode regime in variable structure systems (VSS) is the capacity to attain responses that are independent of the system parameters[4]. From this vision, the Buck DC/DC converter is appropriate for the application of the SMC, which the system is cont ...
... One of the most significant features of the sliding mode regime in variable structure systems (VSS) is the capacity to attain responses that are independent of the system parameters[4]. From this vision, the Buck DC/DC converter is appropriate for the application of the SMC, which the system is cont ...

Application Note #1435 100
... Application Note #1435 Protecting Encoder Input Circuitry If there are voltage spikes which are damaging the line receiver inputs of the Galil controller, the input circuit may be protected by placing 2 diodes on every encoder input that is used on the controller (CHA, CHB, CHA-, CHB-). The procedur ...
... Application Note #1435 Protecting Encoder Input Circuitry If there are voltage spikes which are damaging the line receiver inputs of the Galil controller, the input circuit may be protected by placing 2 diodes on every encoder input that is used on the controller (CHA, CHB, CHA-, CHB-). The procedur ...
Utilization of digitally controlled servo drives in simplification of
... According to this angle the speed and position demand is returned The encoder feedback is therefore recalculated and used for control data generation ...
... According to this angle the speed and position demand is returned The encoder feedback is therefore recalculated and used for control data generation ...
Control theory

Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems with inputs, and how their behavior is modified by feedback. The usual objective of control theory is to control a system, often called the plant, so its output follows a desired control signal, called the reference, which may be a fixed or changing value. To do this a controller is designed, which monitors the output and compares it with the reference. The difference between actual and desired output, called the error signal, is applied as feedback to the input of the system, to bring the actual output closer to the reference. Some topics studied in control theory are stability (whether the output will converge to the reference value or oscillate about it), controllability and observability.Extensive use is usually made of a diagrammatic style known as the block diagram. The transfer function, also known as the system function or network function, is a mathematical representation of the relation between the input and output based on the differential equations describing the system.Although a major application of control theory is in control systems engineering, which deals with the design of process control systems for industry, other applications range far beyond this. As the general theory of feedback systems, control theory is useful wherever feedback occurs. A few examples are in physiology, electronics, climate modeling, machine design, ecosystems, navigation, neural networks, predator-prey interaction, gene expression, and production theory.