Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Power engineering wikipedia , lookup
Electric motor wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Control theory wikipedia , lookup
Alternating current wikipedia , lookup
Resilient control systems wikipedia , lookup
Control system wikipedia , lookup
Rotary encoder wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Induction motor wikipedia , lookup
Dynamometer wikipedia , lookup
Electric machine wikipedia , lookup
Distribution management system wikipedia , lookup
Rectiverter wikipedia , lookup
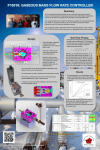
Michal Kašpárek Technical University in Liberec Faculty of Mechanical Engineering Department of Applied Cybernetics [email protected] Complex mechanical structures distributing driving power • Frictional resistance • Moment of inertia • Energy loss High engine performance required High energy consumption New structure of machines • Utilized in design of new structure of the drive of small-diameter knitting machine • Possible application in other textile machines and different industry segments • Utilization of several smaller electromotors placed directly in front of control members Significantly lower wattage and power demands required Much more simple mechanical construction More robust power distibution Transmissions and gears replacement: • High precision electronic cam • Mutliple drive movement synchronization Additional capabilities • Independent high precision motion control • Complex driving function tracking • Virtual cam usability Drive system of functional model of new structure of small-diameter knitting machine Emerson Control Techniques assembly • Digitax ST servo drives • CTM4 series servomotor Digitax ST - Plus • high performance drive • optimized for pulse duty servo • • • • applications high peak torque (up to 56.4Nm peak) LED keypad and SM-Application module Drive control loop runs at 250 µs Multiple drives networking capabilities Control Techniques CTM4 series servomotor • high resolution SinCos multi-turn encoder • 330 V driving voltage • 2 A nominal current • 2,5 Nm Torque Servos 25% torque of original motor • Load wheel also reduced to 25% Active current measurement: • Peak under 10% of maximum current limit • Huge reserve for 4x bigger real load Presented measurements utilize virtual cam principle • Complex trajectory of rotary motion Modelled with high order polynomials in order to ensure smooth progress of higher derivatives (speed, acceleration) • One revolution progression sampled into virtual cam model of desired position and speed Virtual cam revolution ≈ 2π ≈ 3600 samples Limited module memory - 0.1º resolution Real position of the spindle is transformed into the angle of virtual cam revolution According to this angle the speed and position demand is returned The encoder feedback is therefore recalculated and used for control data generation Modern servo drives were tested Huge potential of energy conservation was observed Possibility of direct motor to action member attachment was proven Electronic cam usability was tested and drives deviation was depicted Virtual cam containing high order polynomial motion model was implemented Typical servomotors behaviour was observed at low speeds tested for the knitting machine operation modes • Constant speed fluctuation with stable frequency • Low speeds used compared to motor maximum of 4000 rpm (peaking over 5% of maximum) Different motors would need to be tested or integrated transmission usage reconsidered The influence of high-order polynomic motion function was diminished by described behaviour, nevertheless further investigation of presented phenomenon is necessary