
FormatOfPapers
... desirable, therefore, to develop other methods to solve the motion control problem, methods that do not entail the applied voltages to the saturation limits to cancel r beneficial nonlinearities ids r , and iqsr r ,and ...
... desirable, therefore, to develop other methods to solve the motion control problem, methods that do not entail the applied voltages to the saturation limits to cancel r beneficial nonlinearities ids r , and iqsr r ,and ...

Lab 2 Document (Word format)
... Vc, Vd, and Vo for each value of the setpoint. The output should track the feedback signal, Vd, with a difference between the two values. With K p = 1 record the voltage values in Table 1 and save the data for the report. Compute the theoretical value of voltages Ve and Vd for each value of Vsp in t ...
... Vc, Vd, and Vo for each value of the setpoint. The output should track the feedback signal, Vd, with a difference between the two values. With K p = 1 record the voltage values in Table 1 and save the data for the report. Compute the theoretical value of voltages Ve and Vd for each value of Vsp in t ...

Large-signal feedback control of a bidirectional coupled
... WITCHING converters can be represented taking part feedback loop suitable for large-signal operation particuof a class of feedback systems as illustrated in Fig. 1. larly difficult. In order to avoid the discontinuous conducThe basic operation of the regulator loop consists in tion mode and, at the ...
... WITCHING converters can be represented taking part feedback loop suitable for large-signal operation particuof a class of feedback systems as illustrated in Fig. 1. larly difficult. In order to avoid the discontinuous conducThe basic operation of the regulator loop consists in tion mode and, at the ...

PID Control - Control and Dynamical Systems
... Figure 10.3: Implementation of integral action (left) and derivative action (right) by combining simple blocks. ...
... Figure 10.3: Implementation of integral action (left) and derivative action (right) by combining simple blocks. ...


Addressable Input/Output Module I-9301 / I-9303
... capacity output 24VDC/1A Dry contact output Electronically addressed ...
... capacity output 24VDC/1A Dry contact output Electronically addressed ...
solutions
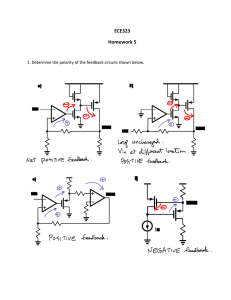
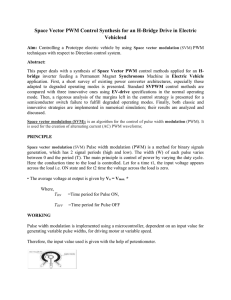
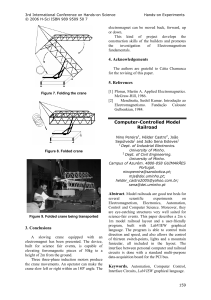
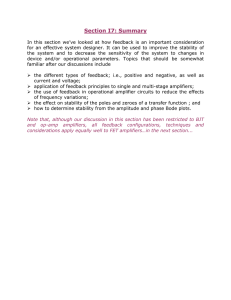
... 4. The BJT source follower has the approximate transfer characteristic as shown in figure 4(a). Consider this follower to be driven by a differential amplifier with a gain of 100 as shown in figure 4(b). Explain the transfer characteristics Vo vs. Vi of the resulting feedback amplifier. ...
... 4. The BJT source follower has the approximate transfer characteristic as shown in figure 4(a). Consider this follower to be driven by a differential amplifier with a gain of 100 as shown in figure 4(b). Explain the transfer characteristics Vo vs. Vi of the resulting feedback amplifier. ...

Block Diagram Analysis for the Magnetic Densimeter
... occurs in the density measurements, only the position control feedback reaches the helmholtz coils. At this point, the signal enters a series of controls on the panel which allow the experimenter to control manually the relation between the current that leaves the photo diode and that which enters t ...
... occurs in the density measurements, only the position control feedback reaches the helmholtz coils. At this point, the signal enters a series of controls on the panel which allow the experimenter to control manually the relation between the current that leaves the photo diode and that which enters t ...


DC shunt motor DC series motor
... shown. With full field, the motor runs at its minimum speed which can be raised in steps by cutting out some of the series turns. ...
... shown. With full field, the motor runs at its minimum speed which can be raised in steps by cutting out some of the series turns. ...

Robust damping of interarea oscillations with unified power
... the damping-control design task challenging. The design methodology should therefore aim at improving damping performance while ensuring the least interaction with other modes over the full range of system operating conditions. This type of control action has been sought by poleplacement and eigenva ...
... the damping-control design task challenging. The design methodology should therefore aim at improving damping performance while ensuring the least interaction with other modes over the full range of system operating conditions. This type of control action has been sought by poleplacement and eigenva ...
Abstract - 1000kv technologies
... Therefore, the input value used is given with the help of potentiometer. ...
... Therefore, the input value used is given with the help of potentiometer. ...

sensorProbe8-X60
... The sensorProbe8-X60 is virtually a ‘plug n play’ device and is extremely easy to use and maintain. The installation process is also simple and one does not need additional power supply or batteries when new optical sensors are added. ...
... The sensorProbe8-X60 is virtually a ‘plug n play’ device and is extremely easy to use and maintain. The installation process is also simple and one does not need additional power supply or batteries when new optical sensors are added. ...
3. Conclusions 4. Acknowledgements 5. References Computer
... 3rd International Conference on Hands-on Science © 2006 H-Sci ISBN 989 9509 50 7 ...
... 3rd International Conference on Hands-on Science © 2006 H-Sci ISBN 989 9509 50 7 ...

Datasheet
... Specifications subject to change without notice – E&OE. The only controlled copy of this Data Sheet is the electronic read-only version located on the Cooper Bussmann Network Drive. All other copies of this document are by definition uncontrolled. This bulletin is intended to clearly present compreh ...
... Specifications subject to change without notice – E&OE. The only controlled copy of this Data Sheet is the electronic read-only version located on the Cooper Bussmann Network Drive. All other copies of this document are by definition uncontrolled. This bulletin is intended to clearly present compreh ...

Design and Application of Full Digital Control System for LLC
... ZVS (Zero Voltage Switching) capability with even no load [1–3], also with wide input voltage range. Steady state operation and characteristics of LLC converter are discussed in many papers as shown in references. In this paper, only basic properties of LLC converter are mentioned. D1 T1 Uin ...
... ZVS (Zero Voltage Switching) capability with even no load [1–3], also with wide input voltage range. Steady state operation and characteristics of LLC converter are discussed in many papers as shown in references. In this paper, only basic properties of LLC converter are mentioned. D1 T1 Uin ...

PI-Like Fuzzy Logic Direct Torque Control of Permanent Magnet
... properly selected to improve the performance of motor drive system. Simulation results are introduced to predict the motor drive system performance and the effect of PI-like fuzzy controller parameters on speed response in this system. The simulation results provide the feasibility and validity of t ...
... properly selected to improve the performance of motor drive system. Simulation results are introduced to predict the motor drive system performance and the effect of PI-like fuzzy controller parameters on speed response in this system. The simulation results provide the feasibility and validity of t ...
Section I7: Summary
... Section I7: Summary In this section we’ve looked at how feedback is an important consideration for an effective system designer. It can be used to improve the stability of the system and to decrease the sensitivity of the system to changes in device and/or operational parameters. Topics that should ...
... Section I7: Summary In this section we’ve looked at how feedback is an important consideration for an effective system designer. It can be used to improve the stability of the system and to decrease the sensitivity of the system to changes in device and/or operational parameters. Topics that should ...


How to easily get an accurate analog input signalnew.eps
... both the control and the power SSR normally needed for a typical temperature, proportional, or soft-start/stop control. By utilizing the well proven Crydom SSR technology, and state of the art microcontrollers, Crydom incorporates both into a single solid state relay package that makes a basic contr ...
... both the control and the power SSR normally needed for a typical temperature, proportional, or soft-start/stop control. By utilizing the well proven Crydom SSR technology, and state of the art microcontrollers, Crydom incorporates both into a single solid state relay package that makes a basic contr ...





Dynamic Fuzzy-Neural Network Controller for Induction Motor Drive
... simulation results are given in fig.8 to fig.12. The plots of these figures show the performances as the combining NNFLB controller for a variety of step changes in the desired setpoint. In the simulations, the learning rate of the recurrent neural network identifier and recurrent neural network con ...
... simulation results are given in fig.8 to fig.12. The plots of these figures show the performances as the combining NNFLB controller for a variety of step changes in the desired setpoint. In the simulations, the learning rate of the recurrent neural network identifier and recurrent neural network con ...
Control theory

Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems with inputs, and how their behavior is modified by feedback. The usual objective of control theory is to control a system, often called the plant, so its output follows a desired control signal, called the reference, which may be a fixed or changing value. To do this a controller is designed, which monitors the output and compares it with the reference. The difference between actual and desired output, called the error signal, is applied as feedback to the input of the system, to bring the actual output closer to the reference. Some topics studied in control theory are stability (whether the output will converge to the reference value or oscillate about it), controllability and observability.Extensive use is usually made of a diagrammatic style known as the block diagram. The transfer function, also known as the system function or network function, is a mathematical representation of the relation between the input and output based on the differential equations describing the system.Although a major application of control theory is in control systems engineering, which deals with the design of process control systems for industry, other applications range far beyond this. As the general theory of feedback systems, control theory is useful wherever feedback occurs. A few examples are in physiology, electronics, climate modeling, machine design, ecosystems, navigation, neural networks, predator-prey interaction, gene expression, and production theory.