
Document
... item regulation) or a total signal of the position sensor and two sensors of effort (at mixed regulation) arrive in the microprocessor controller where it is compared to a signal set by the operator on a control panel. In case of discrepancy of these signals the microprocessor controler develops ope ...
... item regulation) or a total signal of the position sensor and two sensors of effort (at mixed regulation) arrive in the microprocessor controller where it is compared to a signal set by the operator on a control panel. In case of discrepancy of these signals the microprocessor controler develops ope ...

Physical Implementation and Control of Multi
... motion control application software for automated test and measurement applications. The control system proposed in this paper has the capability to control four axis of motion using DC motors or two axis of motion using stepper motors[1]. ...
... motion control application software for automated test and measurement applications. The control system proposed in this paper has the capability to control four axis of motion using DC motors or two axis of motion using stepper motors[1]. ...

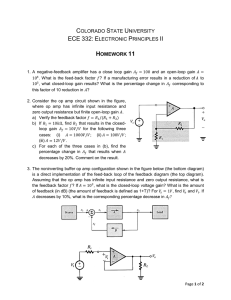
Solved Problems - McMaster University > ECE
... With the controller designed above, compute the steady state value for every signal in the loop. Solutions to Solved Problem 5.8 Solved Problem 5.9. In a feedback control loop for a stable plant, with reference r(t) = Ro cos(4t), the controller is designed to achieve a nominal complementary sensitiv ...
... With the controller designed above, compute the steady state value for every signal in the loop. Solutions to Solved Problem 5.8 Solved Problem 5.9. In a feedback control loop for a stable plant, with reference r(t) = Ro cos(4t), the controller is designed to achieve a nominal complementary sensitiv ...




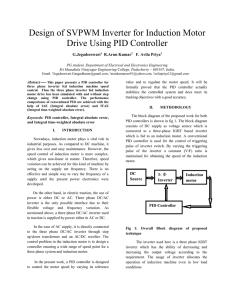
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-ISSN: 2278-1676,p-ISSN: 2320-3331,
... The evolution of Electric Vehicles (EV) creates a global push and provides better replacement of the fuel based vehicles. The Vehicles are charged by batteries and the power flow during starting and braking operations can be designed by Bidirectional quasi Z Source Inverter. The power (SDP) by 15% o ...
... The evolution of Electric Vehicles (EV) creates a global push and provides better replacement of the fuel based vehicles. The Vehicles are charged by batteries and the power flow during starting and braking operations can be designed by Bidirectional quasi Z Source Inverter. The power (SDP) by 15% o ...

743CB Series FIELD STATION MICRO Controller
... actual, real time process dynamics. This is in direct contrast to other “self-tuning” controllers that establish the values of tuning parameters based on an arbitrary process model. ...
... actual, real time process dynamics. This is in direct contrast to other “self-tuning” controllers that establish the values of tuning parameters based on an arbitrary process model. ...

DC385 - LTC1778EGN Evaluation Kit Quick Start Guide
... sense resistor. It provides high efficiency operation at light loads by means of discontinuous mode operation. Noise and RF interference are reduced by means of a forced continuous control pin. The circuit uses a dual SyncFET™ and has a very small footprint. With a wide operating range of VIN from 5 ...
... sense resistor. It provides high efficiency operation at light loads by means of discontinuous mode operation. Noise and RF interference are reduced by means of a forced continuous control pin. The circuit uses a dual SyncFET™ and has a very small footprint. With a wide operating range of VIN from 5 ...

R225-60-9
... circuit of the control, the control will respond to a raising circulating current to either raise or lower its tap position to limit the circulating current. This method has been described in greater detail in other papers in the industry for many years. The limitations to this method are that the l ...
... circuit of the control, the control will respond to a raising circulating current to either raise or lower its tap position to limit the circulating current. This method has been described in greater detail in other papers in the industry for many years. The limitations to this method are that the l ...

N - ZARM
... 100 ksps conversion rate at 5V. The reference voltage has been set by an adjustable voltage regulator IC TL317 according to position sensor measurement of 200 millimeters establishes by objectives. The control and process unit consists in an 8bit AVR RISC microcontroller Atmega8535 from ATMEL. To cr ...
... 100 ksps conversion rate at 5V. The reference voltage has been set by an adjustable voltage regulator IC TL317 according to position sensor measurement of 200 millimeters establishes by objectives. The control and process unit consists in an 8bit AVR RISC microcontroller Atmega8535 from ATMEL. To cr ...
Snapshot Day Power Point
... This process is repeated for each of the seven charging units at specific points in the charging process. The optimized profile could be better implemented if the charging profile of each battery sting are controlled autonomously. Our team proposes to design a configuration that allows the chargers ...
... This process is repeated for each of the seven charging units at specific points in the charging process. The optimized profile could be better implemented if the charging profile of each battery sting are controlled autonomously. Our team proposes to design a configuration that allows the chargers ...

compensating for cpd in nc-afm: am-kpfm in uhv using
... topographical artifacts for true height determination. The first resonance (f1) of the cantilever is used to control tip height, while the second flexural mode (f2) for contact potential measurements. Two oscillation controllers OC4 are used, one as PLL for tracking the frequency shift at f1, and th ...
... topographical artifacts for true height determination. The first resonance (f1) of the cantilever is used to control tip height, while the second flexural mode (f2) for contact potential measurements. Two oscillation controllers OC4 are used, one as PLL for tracking the frequency shift at f1, and th ...



Overview of Project
... • Eliminate threats to human life – Will equip the amphibious vehicle with a paintball gun and camera – Will be able to control from a remote location • Have ability to maneuver and fire from remote location ...
... • Eliminate threats to human life – Will equip the amphibious vehicle with a paintball gun and camera – Will be able to control from a remote location • Have ability to maneuver and fire from remote location ...



an efficient locomotion system for autonomous robots
... the D-term(derivative). The controller parameters are proportional gain K, integral time Ti, and derivative time Td. The integral, proportional and derivative part can be interpreted as control actions based on the past, the present and the future. The variable (e) represents the difference between ...
... the D-term(derivative). The controller parameters are proportional gain K, integral time Ti, and derivative time Td. The integral, proportional and derivative part can be interpreted as control actions based on the past, the present and the future. The variable (e) represents the difference between ...

Two Way Remote Control
... this conclusion. Valuable help of Mr. Victorioso M. Go (Dong Jr.) who removed the 74LV245 from the board and solder directly bypass wires on the VS1001. Socket for the TRF2.4G connector. This connector is a two-row, 10 post, 1.27 mm header. Again, Mr. Victorioso M. Go was the one who solved this l ...
... this conclusion. Valuable help of Mr. Victorioso M. Go (Dong Jr.) who removed the 74LV245 from the board and solder directly bypass wires on the VS1001. Socket for the TRF2.4G connector. This connector is a two-row, 10 post, 1.27 mm header. Again, Mr. Victorioso M. Go was the one who solved this l ...

MIGHTY DRIVE - MicroKinetics
... The Mighty Drive is designed for ease of installation & immediate functionality. This rugged, enclosed unit provides a complete Multi-driver system consisting of drive electronics & power supply that are prewired, pretested and ready for immediate use. Featuring on/off switch, solid state relay,cont ...
... The Mighty Drive is designed for ease of installation & immediate functionality. This rugged, enclosed unit provides a complete Multi-driver system consisting of drive electronics & power supply that are prewired, pretested and ready for immediate use. Featuring on/off switch, solid state relay,cont ...
Control theory

Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems with inputs, and how their behavior is modified by feedback. The usual objective of control theory is to control a system, often called the plant, so its output follows a desired control signal, called the reference, which may be a fixed or changing value. To do this a controller is designed, which monitors the output and compares it with the reference. The difference between actual and desired output, called the error signal, is applied as feedback to the input of the system, to bring the actual output closer to the reference. Some topics studied in control theory are stability (whether the output will converge to the reference value or oscillate about it), controllability and observability.Extensive use is usually made of a diagrammatic style known as the block diagram. The transfer function, also known as the system function or network function, is a mathematical representation of the relation between the input and output based on the differential equations describing the system.Although a major application of control theory is in control systems engineering, which deals with the design of process control systems for industry, other applications range far beyond this. As the general theory of feedback systems, control theory is useful wherever feedback occurs. A few examples are in physiology, electronics, climate modeling, machine design, ecosystems, navigation, neural networks, predator-prey interaction, gene expression, and production theory.