Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Brushed DC electric motor wikipedia , lookup
Stepper motor wikipedia , lookup
Control theory wikipedia , lookup
Opto-isolator wikipedia , lookup
Distributed control system wikipedia , lookup
Transmission line loudspeaker wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Control system wikipedia , lookup
Wassim Michael Haddad wikipedia , lookup
Electrical engineering wikipedia , lookup
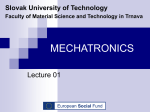
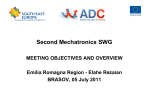
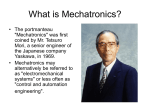
PAMM header will be provided by the publisher Mechatronic Design of the 2 DOF PRRRP Parallel Robot S. Besoiu*, V. Mătieş**, and S.-D. Stan *** 1 Department of Mechanisms, Precision Mechanics and Mechatronics, Technical University of Cluj-Napoca, C. Daicoviciu Str., no. 15, 400020, Cluj-Napoca, Romania Mechatronics consists in integration of three fields in engineering: mechanics, electronics and information technology. The paradigm of mechatronics is the integration concept, being the first step in the design of complex mechatronic systems. The need for an integrated approach to the design of complex engineering system involving electronic engineering, mechanical engineering and computing has led to the growth of the concept of mechatronics. The paper presents details regarding the integration process for the kinematic axis in mechatronic. The example of the positioning system based on dc motor and screw-nut transmission is analysed. This actuator is further used for driving a 2 DOF PRRRP parallel robot. Copyright line will be provided by the publisher 1 Introduction Mechatronics defines the evolution from the past (traditional sequence engineering) to the future (intelligent hyperintegrated systems). It’s the basic of the future and represents the current technology challenges in engineering and education, so being the design technology of intelligent hyperintegrated machines. 2 Integration of the basic function in a mechatronic system Almost any mechatronic system is built-up with some basic units with basic functions which are made to interact between them, to form a complex mechatronic system with a given functionality. Basic functions of an intelligent system are shown in Fig. 1. Fig. 1 Basic functions of an intelligent system. The analog to digital converter unit is based on a 13bit ADC MCP3301 with SPI serial interface from Microchip. It has 100 ksps conversion rate at 5V. The reference voltage has been set by an adjustable voltage regulator IC TL317 according to position sensor measurement of 200 millimeters establishes by objectives. The control and process unit consists in an 8bit AVR RISC microcontroller Atmega8535 from ATMEL. To create programs it is possible to use both assembly and high level languages (C, Basic etc.). The program for microcontroller was written in BASCOM AVR which is a BASIC language compiler for AVR family, providing a simulator, a programmer and other useful resources. In Fig. 2 it is showed the mechanical structure, sensors and DC motor. Fig. 2 Mechanical structure with sensors and DC motor. ____________________ * Corresponding author: e-mail [email protected], Phone: + 40 264 401755, Fax: +40 264 415490 e-mail [email protected], Phone: +40 264 401682, Fax: +40 264 415490 e-mail [email protected], Phone: +40 264 401756, Fax: +40 264 415490 ** *** Copyright line will be provided by the publisher 2 Section 00 The next step is planning the control software according to the objectives, mechanical structures, sensors and actuators. Based on the control software that we have in sight we design the electronic component. This is made on a test circuit board with the possibility to program and control from the PC. The electronic hardware that this application uses consists in six non-independent units: DC motor control unit, analog to digital converter unit for position sensor, control and processing unit, communication with PC unit, security unit and power supply unit (Fig. 4). The DC motor control unit is based on a push-pull four channel drivers L293E IC with an output current 1A max. It uses only two channels from this IC to control the DC motor in both directions. The digital controlled trick is the chip enable input of the IC where the PWM is applied. Therefore the drivers inputs may be used in bidirectional mode. Fig. 2 Electronic circuit board and the 2 DOF parallel robot The analog to digital converter unit is based on a 13bit ADC MCP3301 with SPI serial interface from Microchip. It has 100 ksps conversion rate at 5V. The reference voltage has been set by an adjustable voltage regulator IC TL317 according to position sensor measurement of 200 millimeters establishes by objectives. The control and process unit consists in an 8bit AVR RISC microcontroller Atmega8535 from ATMEL. To create programs it is possible to use both assembly and high level languages (C, Basic etc.). Using the Delphi environment there was written a PC program to control the system and communicate with the microcontroller through COM port. In Fig. 3 is shown one of the interfaces of the program. In the control program there was included a Proportional-Derivative-Integrative (PID) controller, because this type of controller is very efficient, it is not a very complex algorithm, it’s very easy to implement and has the advantage of modularity. Also in the program there is included a system modeling and optimization unit which generates a file with timestamps, current signal and current position, useful for MATLAB software, in system modeling and optimization tool. Fig. 3 Graphical User Interface for control a kinematic axis. 3 Conclusion This paper presents details about the integration concept in the design of kinematic axis and integrations of the basic function of a complex mechatronic system. In this paper it is analyzed a positioning system with ball bearing screw-nut transmission actuated by a DC motor and controlled by a microcontroller and a PC, to understand the need of integration in the design of mechatronics systems, for research and educational purposes. The need for an integrated approach to the design of complex engineering system involving electronic engineering, mechanical engineering and computing has led to the growth of the concept of mechatronics. This actuator is further used for driving a 2 DOF PRRRP parallel robot.. References [1] S. Stan, Diplomarbeit, Analyse und Optimierung der strukturellen Abmessungen von Werkzeugmaschinen mit Parallelstruktur, IWFTU Braunschweig, 2003, Germany. [2] S. Stan, V. Maties, R. Balan, Optimal Design of 2 DOF Parallel Kinematics Machines, PAMM · Proc. Appl. Math. Mech. 6, 705–706 (2006) / DOI 10.1002/pamm.200610333. Copyright line will be provided by the publisher