

Math 200 Spring 2010 March 12 Definition. An n by n matrix E is
... Definitions. The span of a set of vectors is the set of all linear combinations of them. The row space of a matrix is the span of its row vectors, and the column space is the span of its column vectors. So the column space of a matrix is the same as its image (why?). Notation. We use the notation rr ...
... Definitions. The span of a set of vectors is the set of all linear combinations of them. The row space of a matrix is the span of its row vectors, and the column space is the span of its column vectors. So the column space of a matrix is the same as its image (why?). Notation. We use the notation rr ...
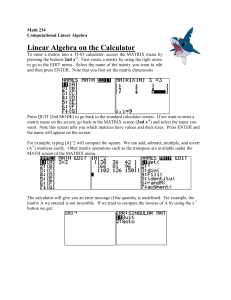
Computational Linear Algebra
... matrix name on the screen, go back to the MATRIX screen (2nd x-1) and select the name you want. Note this screen tells you which matrices have values and their sizes. Press ENTER and the name will appear on the screen. For example, typing [A]^2 will compute the square. We can add, subtract, multiply ...
... matrix name on the screen, go back to the MATRIX screen (2nd x-1) and select the name you want. Note this screen tells you which matrices have values and their sizes. Press ENTER and the name will appear on the screen. For example, typing [A]^2 will compute the square. We can add, subtract, multiply ...

Homework 3
... the same eigenvalue λ. Similarly, if v is an eigenvector of Q with eigenvalue µ, then At v is an eigenvector of P corresponding to the same eigenvalue µ. C. Suppose that n eigenvalues of Q are all positive, λ1 > λ2 > · · · > λn > 0. Let vi , 1 ≤ i ≤ n be the At vi corresponding eigenvectors of Q wit ...
... the same eigenvalue λ. Similarly, if v is an eigenvector of Q with eigenvalue µ, then At v is an eigenvector of P corresponding to the same eigenvalue µ. C. Suppose that n eigenvalues of Q are all positive, λ1 > λ2 > · · · > λn > 0. Let vi , 1 ≤ i ≤ n be the At vi corresponding eigenvectors of Q wit ...

Sol 2 - D-MATH
... be no well-defined inverse, since any point on the vertical line passing by (x, 0) is a potential pre-image of the transformation. Applying Exercise 5(b), you can in fact check that the criterion for inverses is not fulfilled by the matrix B. To understand the geometric action of the matrix C, it ma ...
... be no well-defined inverse, since any point on the vertical line passing by (x, 0) is a potential pre-image of the transformation. Applying Exercise 5(b), you can in fact check that the criterion for inverses is not fulfilled by the matrix B. To understand the geometric action of the matrix C, it ma ...


Exam #2 Solutions
... Since V is finite dimensional and H is a subspace of V, we have that H is finitedimensional. Let dim H = n and let {b1, …, bn} be a basis for H. Claim: {T(b1), …, T(bn)} is a basis for T(H). First we show that {T(b1), …, T(bn)} spans T(H) (i.e., that any vector in T(H) can be written as a linear com ...
... Since V is finite dimensional and H is a subspace of V, we have that H is finitedimensional. Let dim H = n and let {b1, …, bn} be a basis for H. Claim: {T(b1), …, T(bn)} is a basis for T(H). First we show that {T(b1), …, T(bn)} spans T(H) (i.e., that any vector in T(H) can be written as a linear com ...


Solutions of First Order Linear Systems
... times it appears as a root of the characteristic equation det(A − λI) = 0. For each eigenvalue λ, we need to find the same number of vector solutions as its Algebraic Multiplicity. If AM = 1, then we are in one of the situations described above so the more difficult (and interesting) case is when AM ...
... times it appears as a root of the characteristic equation det(A − λI) = 0. For each eigenvalue λ, we need to find the same number of vector solutions as its Algebraic Multiplicity. If AM = 1, then we are in one of the situations described above so the more difficult (and interesting) case is when AM ...

F08 Exam 1
... Please work only one problem per page, starting with the pages provided. Clearly label your answer. If a problem continues on a new page, clearly state this fact on both the old and the new pages. [1] Define a ring homomorphism. Define an ideal. Prove that the kernel of a ring homomorphism is an ide ...
... Please work only one problem per page, starting with the pages provided. Clearly label your answer. If a problem continues on a new page, clearly state this fact on both the old and the new pages. [1] Define a ring homomorphism. Define an ideal. Prove that the kernel of a ring homomorphism is an ide ...

Why eigenvalue problems?
... The eigenvalues of a matrix are the roots of the characteristic polynomial p(z) = det(zI − A). One way to compute eigenvalues, then, is to form the characteristic polynomial and run a root-finding routine on it. In practice, this is a terrible idea, if only because the root-finding problem is often ...
... The eigenvalues of a matrix are the roots of the characteristic polynomial p(z) = det(zI − A). One way to compute eigenvalues, then, is to form the characteristic polynomial and run a root-finding routine on it. In practice, this is a terrible idea, if only because the root-finding problem is often ...

Matrix operations
... We define addition of two matrices in the following way: Consider a matrix A with elements indexed ai,j , and a matrix B with elements bi,j . The matrix sum A + B is a matrix C is a matrix whose elements are computed by ci,j = ai,j + bi,j . • In English, that says add two matrices by adding the corr ...
... We define addition of two matrices in the following way: Consider a matrix A with elements indexed ai,j , and a matrix B with elements bi,j . The matrix sum A + B is a matrix C is a matrix whose elements are computed by ci,j = ai,j + bi,j . • In English, that says add two matrices by adding the corr ...

Glossary Term Definition nonconsecutive sides Sides of a polygon
... For any real numbers a and b, and any positive integer n, if an = b, then a is an nth root of b. Example: 2 is the fifth root of 32 since 25 = 32. A set with no elements shown by the symbol { } or ∅ . A solution set with no members. Also called an empty set. A line with equal distances marked off to ...
... For any real numbers a and b, and any positive integer n, if an = b, then a is an nth root of b. Example: 2 is the fifth root of 32 since 25 = 32. A set with no elements shown by the symbol { } or ∅ . A solution set with no members. Also called an empty set. A line with equal distances marked off to ...

SVDslides.ppt
... • If I observe the outputs of a linear system and watch what is coming, could I figure out what the inputs were? • Related problem: If you start with 2 things in the input space and run them through the system and compare the outputs, can we still distinguish them as different? • So when is the line ...
... • If I observe the outputs of a linear system and watch what is coming, could I figure out what the inputs were? • Related problem: If you start with 2 things in the input space and run them through the system and compare the outputs, can we still distinguish them as different? • So when is the line ...


MTH 264 SECTION 3.3 20 DELTA COLLEGE The slope field for the
... The characteristic equation of this matrix is: λ2 − 16 = 0. This equation factors into (λ − 4)(λ + 4) = 0, and so it has two distinct, real roots: λ1 = 4 and λ2 = −4. Since one eigenvalue is positive and one eigenvalue is negative, the equilibrium point at the origin is a saddle. (b) For eigenvalue ...
... The characteristic equation of this matrix is: λ2 − 16 = 0. This equation factors into (λ − 4)(λ + 4) = 0, and so it has two distinct, real roots: λ1 = 4 and λ2 = −4. Since one eigenvalue is positive and one eigenvalue is negative, the equilibrium point at the origin is a saddle. (b) For eigenvalue ...




aa2.pdf
... ) = 1. Use the Chinese remainder • Approach 2: Let f ∈ k[x] be such that gcd(f, dx theorem to construct inductively polynomials gr ∈ k[x], r = 1, 2, . . . , such that, setting pr := x + f ·g1 + f 2 ·g2 + . . . + f r ·gr ∈ k[x], we have f (pr (x)) ∈ (f (x))r · k[x]. Deduce in particular that, for any ...
... ) = 1. Use the Chinese remainder • Approach 2: Let f ∈ k[x] be such that gcd(f, dx theorem to construct inductively polynomials gr ∈ k[x], r = 1, 2, . . . , such that, setting pr := x + f ·g1 + f 2 ·g2 + . . . + f r ·gr ∈ k[x], we have f (pr (x)) ∈ (f (x))r · k[x]. Deduce in particular that, for any ...

another version
... Graphs in which a single vertex has edges to all other vertices each one of which only have degree 1. The corresponding adjacency matrix A for such a graph would be: 0 1 1L1 ...
... Graphs in which a single vertex has edges to all other vertices each one of which only have degree 1. The corresponding adjacency matrix A for such a graph would be: 0 1 1L1 ...


Jordan normal form

In linear algebra, a Jordan normal form (often called Jordan canonical form)of a linear operator on a finite-dimensional vector space is an upper triangular matrix of a particular form called a Jordan matrix, representing the operator with respect to some basis. Such matrix has each non-zero off-diagonal entry equal to 1, immediately above the main diagonal (on the superdiagonal), and with identical diagonal entries to the left and below them. If the vector space is over a field K, then a basis with respect to which the matrix has the required form exists if and only if all eigenvalues of the matrix lie in K, or equivalently if the characteristic polynomial of the operator splits into linear factors over K. This condition is always satisfied if K is the field of complex numbers. The diagonal entries of the normal form are the eigenvalues of the operator, with the number of times each one occurs being given by its algebraic multiplicity.If the operator is originally given by a square matrix M, then its Jordan normal form is also called the Jordan normal form of M. Any square matrix has a Jordan normal form if the field of coefficients is extended to one containing all the eigenvalues of the matrix. In spite of its name, the normal form for a given M is not entirely unique, as it is a block diagonal matrix formed of Jordan blocks, the order of which is not fixed; it is conventional to group blocks for the same eigenvalue together, but no ordering is imposed among the eigenvalues, nor among the blocks for a given eigenvalue, although the latter could for instance be ordered by weakly decreasing size.The Jordan–Chevalley decomposition is particularly simple with respect to a basis for which the operator takes its Jordan normal form. The diagonal form for diagonalizable matrices, for instance normal matrices, is a special case of the Jordan normal form.The Jordan normal form is named after Camille Jordan.