
ON SQUARE ROOTS OF NORMAL OPERATORS1 768
... The object of this note is to point out a simple condition to be satisfied by a square root A guaranteeing that it be normal. This criterion will involve the (closed, convex) set W= Wa consisting of the closure of the set of values (^4x, x) where ||x|| = l. (Cf. also [2] wherein is discussed a conne ...
... The object of this note is to point out a simple condition to be satisfied by a square root A guaranteeing that it be normal. This criterion will involve the (closed, convex) set W= Wa consisting of the closure of the set of values (^4x, x) where ||x|| = l. (Cf. also [2] wherein is discussed a conne ...

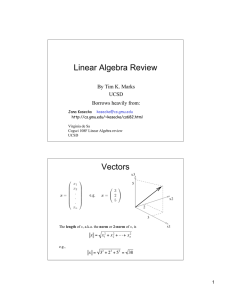
Linear Algebra Refresher
... The implicit function (f(x,y,z) needs to have value zero if the point (x,y,z) is on the line perpendicular to the vectors, and non-zero elsewhere. Here is one way to construct such a function: If x,y,z is perpendicular to a,b,c then (x,y,z) * (a,b,c) = 0 (using * for the dot product) If d,e,f is per ...
... The implicit function (f(x,y,z) needs to have value zero if the point (x,y,z) is on the line perpendicular to the vectors, and non-zero elsewhere. Here is one way to construct such a function: If x,y,z is perpendicular to a,b,c then (x,y,z) * (a,b,c) = 0 (using * for the dot product) If d,e,f is per ...


Recitation Transcript
... I'm going to put the first eigenvector in the first column, we have to stick 1 in the first column as well and then 0.4 like this. And then lastly, we also have U inverse which I can just work out to be -1/3, one over the determinant, times -1, -1, -2, and 1, which simplifies to this. ...
... I'm going to put the first eigenvector in the first column, we have to stick 1 in the first column as well and then 0.4 like this. And then lastly, we also have U inverse which I can just work out to be -1/3, one over the determinant, times -1, -1, -2, and 1, which simplifies to this. ...







1.4 The Matrix Equation Ax b Linear combinations can be viewed as
... columns of A, then we say that the columns of A span R 3 . Definition We say that the columns of A = ...
... columns of A, then we say that the columns of A span R 3 . Definition We say that the columns of A = ...


Math 8502 — Homework I
... they non-degenerate? For which values of the parameters are they hyperbolic and what are the dimensions of the stable and unstable manifolds? b. Show that the z-axis is an invariant set which is contained in the stable manifold of the origin: W s (0). c. Let L : R3 → R3 be the linear map L(x, y, z) ...
... they non-degenerate? For which values of the parameters are they hyperbolic and what are the dimensions of the stable and unstable manifolds? b. Show that the z-axis is an invariant set which is contained in the stable manifold of the origin: W s (0). c. Let L : R3 → R3 be the linear map L(x, y, z) ...

Week 8
... Building bigger matrices out of smaller matrices: [A;B] will build a 5 by 2 matrix by putting A and B together, one on top of the other. If you try [A,B], Matlab will try to put them side by side which can’t be done because their number of rows dont match; Matlab will give an error message. An impor ...
... Building bigger matrices out of smaller matrices: [A;B] will build a 5 by 2 matrix by putting A and B together, one on top of the other. If you try [A,B], Matlab will try to put them side by side which can’t be done because their number of rows dont match; Matlab will give an error message. An impor ...








Discussion
... matrix [A, B]. In this case, this identity matrix would need to be of dimensions 2x3, but identity matrices are necessarily square. One possibility is to append a third row consisting of only zero entries onto [A, B]. This addition to the matrix creates a matrix of the proper dimensions, but one tha ...
... matrix [A, B]. In this case, this identity matrix would need to be of dimensions 2x3, but identity matrices are necessarily square. One possibility is to append a third row consisting of only zero entries onto [A, B]. This addition to the matrix creates a matrix of the proper dimensions, but one tha ...


Project synopsis on IOT BASED LED MATRIX Under taken
... supply is required as it is supplied from the USB port. But when it is placed inside the enclosure with other display modules, its 3.3V pin should be connected to the 3.3V pin of the dual power supply board. Following figure shows the connections between the power supply, NodeMCU, and LED matrix pan ...
... supply is required as it is supplied from the USB port. But when it is placed inside the enclosure with other display modules, its 3.3V pin should be connected to the 3.3V pin of the dual power supply board. Following figure shows the connections between the power supply, NodeMCU, and LED matrix pan ...
Jordan normal form

In linear algebra, a Jordan normal form (often called Jordan canonical form)of a linear operator on a finite-dimensional vector space is an upper triangular matrix of a particular form called a Jordan matrix, representing the operator with respect to some basis. Such matrix has each non-zero off-diagonal entry equal to 1, immediately above the main diagonal (on the superdiagonal), and with identical diagonal entries to the left and below them. If the vector space is over a field K, then a basis with respect to which the matrix has the required form exists if and only if all eigenvalues of the matrix lie in K, or equivalently if the characteristic polynomial of the operator splits into linear factors over K. This condition is always satisfied if K is the field of complex numbers. The diagonal entries of the normal form are the eigenvalues of the operator, with the number of times each one occurs being given by its algebraic multiplicity.If the operator is originally given by a square matrix M, then its Jordan normal form is also called the Jordan normal form of M. Any square matrix has a Jordan normal form if the field of coefficients is extended to one containing all the eigenvalues of the matrix. In spite of its name, the normal form for a given M is not entirely unique, as it is a block diagonal matrix formed of Jordan blocks, the order of which is not fixed; it is conventional to group blocks for the same eigenvalue together, but no ordering is imposed among the eigenvalues, nor among the blocks for a given eigenvalue, although the latter could for instance be ordered by weakly decreasing size.The Jordan–Chevalley decomposition is particularly simple with respect to a basis for which the operator takes its Jordan normal form. The diagonal form for diagonalizable matrices, for instance normal matrices, is a special case of the Jordan normal form.The Jordan normal form is named after Camille Jordan.