




PMV-ALGEBRAS OF MATRICES Department of
... Conversely, if H, W and C are as above then there exists a number µ > 0 such that Γ((Rn , C −1 PH C), µW ) is a product MV-algebra. Throughout we use the notation of (Rn , C −1 PH C) toP indicate the lattice-ordered n real algebra Rn with the positive cone equal precisely i,j=1 R+ C −1 Eij H T C. It ...
... Conversely, if H, W and C are as above then there exists a number µ > 0 such that Γ((Rn , C −1 PH C), µW ) is a product MV-algebra. Throughout we use the notation of (Rn , C −1 PH C) toP indicate the lattice-ordered n real algebra Rn with the positive cone equal precisely i,j=1 R+ C −1 Eij H T C. It ...






EECS 275 Matrix Computation
... A 7→ x = A−1 b when A is perturbed by infinitesimal δA, then (A + δA)(x + δx) = b Using Ax = b and dropping the term (δA)(δx), we obtain (δA)x + A(δx) = 0, that is, δx = −A−1 (δA)x It implies kδxk ≤ kA−1 kkδAkkxk, or equivalently ...
... A 7→ x = A−1 b when A is perturbed by infinitesimal δA, then (A + δA)(x + δx) = b Using Ax = b and dropping the term (δA)(δx), we obtain (δA)x + A(δx) = 0, that is, δx = −A−1 (δA)x It implies kδxk ≤ kA−1 kkδAkkxk, or equivalently ...

Extensions to complex numbers
... • Normal matrices contain symmetric, skewsymmetric, orthogonal, Hermitian, skewHermitain and unitary as special cases. • We can find a unitary matrix U, such that N can be written as UDUH, for some diagonal matrix whose diagonal entries are the eigenvalues of N. http://en.wikipedia.org/wiki/Normal_m ...
... • Normal matrices contain symmetric, skewsymmetric, orthogonal, Hermitian, skewHermitain and unitary as special cases. • We can find a unitary matrix U, such that N can be written as UDUH, for some diagonal matrix whose diagonal entries are the eigenvalues of N. http://en.wikipedia.org/wiki/Normal_m ...


Introduction; matrix multiplication
... basis to make some property of the underlying transformation obvious, and about finding changes of basis that are “nice” for numerical work. 2. A linear transformation may correspond to different matrices depending on the choice of basis, but that doesn’t mean the linear transformation is always the ...
... basis to make some property of the underlying transformation obvious, and about finding changes of basis that are “nice” for numerical work. 2. A linear transformation may correspond to different matrices depending on the choice of basis, but that doesn’t mean the linear transformation is always the ...



Lecture 25 March 24 Wigner
... of Ak as paths of length k from a vertex back to itself, where the value of a path is the product of the labels along the path. We can classify paths by their structure: in some paths, every edge is traversed at least twice, and in others, there is at least one edge which is traversed only once. Let ...
... of Ak as paths of length k from a vertex back to itself, where the value of a path is the product of the labels along the path. We can classify paths by their structure: in some paths, every edge is traversed at least twice, and in others, there is at least one edge which is traversed only once. Let ...
matrices - ginawalker2525
... BIG BOOK OF MATRICES • What is a Matrix? • Adding & Subtracting • Multiply by a Scalar • Multiplication ...
... BIG BOOK OF MATRICES • What is a Matrix? • Adding & Subtracting • Multiply by a Scalar • Multiplication ...


Matrices and Systems of Equations
... III. Gaussian Elimination with Back-Substitution This last matrix is in row-echelon form. Here are the characteristics that define a matrix to be in row-echelon form: 1. All rows consisting entirely of zeros occur at the bottom of the matrix. 2. The first nonzero element of any row is 1, called a ...
... III. Gaussian Elimination with Back-Substitution This last matrix is in row-echelon form. Here are the characteristics that define a matrix to be in row-echelon form: 1. All rows consisting entirely of zeros occur at the bottom of the matrix. 2. The first nonzero element of any row is 1, called a ...

matrices2
... A(BC) = (AB)C A(B+C) = AB +AC (A+B)C = AC+BC c(AB) = (cA)B=A(cB) AIn = A ImA = A assuming A is m by n and all operations are defined. ...
... A(BC) = (AB)C A(B+C) = AB +AC (A+B)C = AC+BC c(AB) = (cA)B=A(cB) AIn = A ImA = A assuming A is m by n and all operations are defined. ...
Jordan normal form

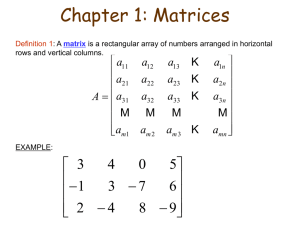
In linear algebra, a Jordan normal form (often called Jordan canonical form)of a linear operator on a finite-dimensional vector space is an upper triangular matrix of a particular form called a Jordan matrix, representing the operator with respect to some basis. Such matrix has each non-zero off-diagonal entry equal to 1, immediately above the main diagonal (on the superdiagonal), and with identical diagonal entries to the left and below them. If the vector space is over a field K, then a basis with respect to which the matrix has the required form exists if and only if all eigenvalues of the matrix lie in K, or equivalently if the characteristic polynomial of the operator splits into linear factors over K. This condition is always satisfied if K is the field of complex numbers. The diagonal entries of the normal form are the eigenvalues of the operator, with the number of times each one occurs being given by its algebraic multiplicity.If the operator is originally given by a square matrix M, then its Jordan normal form is also called the Jordan normal form of M. Any square matrix has a Jordan normal form if the field of coefficients is extended to one containing all the eigenvalues of the matrix. In spite of its name, the normal form for a given M is not entirely unique, as it is a block diagonal matrix formed of Jordan blocks, the order of which is not fixed; it is conventional to group blocks for the same eigenvalue together, but no ordering is imposed among the eigenvalues, nor among the blocks for a given eigenvalue, although the latter could for instance be ordered by weakly decreasing size.The Jordan–Chevalley decomposition is particularly simple with respect to a basis for which the operator takes its Jordan normal form. The diagonal form for diagonalizable matrices, for instance normal matrices, is a special case of the Jordan normal form.The Jordan normal form is named after Camille Jordan.