Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Quartic function wikipedia , lookup
Cartesian tensor wikipedia , lookup
Elementary algebra wikipedia , lookup
History of algebra wikipedia , lookup
Determinant wikipedia , lookup
Jordan normal form wikipedia , lookup
Basis (linear algebra) wikipedia , lookup
System of polynomial equations wikipedia , lookup
Bra–ket notation wikipedia , lookup
Singular-value decomposition wikipedia , lookup
Perron–Frobenius theorem wikipedia , lookup
Eigenvalues and eigenvectors wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Four-vector wikipedia , lookup
Orthogonal matrix wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
Matrix calculus wikipedia , lookup
Linear algebra wikipedia , lookup
Math 221, Section 1.4
Today: (1) The ‘spanning’ problem as a linear system
(2) Existence of solutions
(3) Rewrite a linear system into a matrix equation
1 / 10
Last time:
I
I
h1i
h1i
Given u = 2 and v = 0 , how do we determine if a third
2
3
vector w is in Span{u, v}?
Answer:
w is in Span{u, v} ⇔ w = su + tv for certain scalars s, t
⇔ the equation w = su + tv has solutions for s, t.
I
h1i
Examples: take w = 2 , then the equation su + tv = w is
5
written as
h1i
h 1 i h s+t i h 1 i
2s
s 2 +t 0 =
= 2 .
3
This
1
2
3
2
3s+2t
5
s+t =1
2s =2
3s+2t =5
is a linear system
whose augmented matrix is
1 1
0 2 . (What are the columns?)
2 5
2 / 10
Spanning problem as linear system
(Continued from above)
1 1 1
1 1 1
I 2 0 2 −→ · · · (Exercise) −→ 0 1 0
.
3 2 5
0 0 2 REF
The last equation reads 0s + 0t = 2 which is absurd, so
I
I
I
no solution s, t for this system,
w is not in Span{u, v}.
h3i
(Exercise) What about w = 2 ? (Remember w = u + 2v.)
7
1 1 3
1 0 1
s=1
2 0 2 −→ · · · −→ 0 1 2
⇒
t=2
3 2 7
0 0 0 RREF
I
I
The solution exists.
w lies in Span{u, v}.
3 / 10
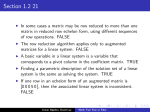
Existence of solution
I
When asked whether w is in Span{u, v} or not, we don’t need
to solve the solution of the linear system [uv|w]. We just
want to know if the solution exists or not.
I
Question: How do we know if a solution exists without
solving the system completely?
I
Answer: Read the REF (not the RREF).
(Examples in Sec 1.2)
I
I
I
(Example of no solution)
1 −3/2
0 1 −4 8
2 −3 2 1 → · · · → 0
1
5 −8 7 1
0
0
1
−4
0
1/2
8
1
REF
There is no solution if the last column, the constant vector,
has a pivot (the leading entry, and is 1).
4 / 10
Existence of solution
I
(Example of unique solution)
I
I
I
1
0
−4
−2
2
5
1
−8
9
0
1 −2
8 → ··· → 0 1
9
0 0
1
−4
1
0
4
21 REF
There is a unique solution if every column except the last one
contains a pivot (because we can further apply Step 5 (backward sub.)
in the Gaussisn elimination to obtain the solution).
(Example of infinity many solutions)
I
I
1 2 4
2 4 6
3 6 9
8
1
8 → ··· → 0
12
0
2
0
0
4
1
0
8
4
0 REF
There are infinity many solutions if the last column and one of
the columns of the coefficient matrix do not containing a pivot
(because the variable corresponding
1 2
to a parameter, remember 0 0
0 0
to this non-pivotal
column is assigned
0 −8
x + 2y = 8
1
4
⇒
).
z
=4
0
0
RREF
5 / 10
Focus on coefficient matrix
What if I allow the constant vector to be arbitrary?
h 1 −2 −1 i
b1
(Sec 1.4, Ex 16) A = −2 2 0 and b = b2 .
4 −1 3
b3
(a) Show that the system with augmented matrix [A|b] does not
have a solution for certain b.
(b) Describe all b for which the system [A|b] has a solution.
6 / 10
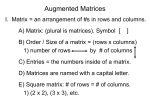
Summary: Theorem 4 on p.37
Let A be a 3 × 3 matrix. Then the following statements are
logically equivalent. That is, for a particular A, either they are all
true statements or they are all false.
(a) For every b in R3 , the augmented matrix [A|b] has a solution.
(b) Each b in R3 is in the span of the columns of A (in other
words, the span of columns of A is R3 ).
(c) Each b in R3 is a linear combination of the columns of A.
(d) The REF of A has a pivot on every row (so there is no zero
row).
(Warning: Theorem 4 is about the properties of a coefficient matrix A, not an
augmented matrix [A|b].)
7 / 10
8 / 10
Rewrite a linear system into a matrix equation
Write the left hand side of a linear system
1
−2
1
x 0 + y 2 + z −8
−4
5
9
as a matrix multiplication
1 −2 1
x
0
2 −8 y
−4 5
9
z
abbreviated as Ax (product
h x i of a coefficient matrix A times and an
unknown vector x = y ).
z
So an equation will be written as Ax = b.
9 / 10
Appendix: Properties of matrix multiplication
Example (Practice exercise on p.40)
A = [ 23 51 ], u =
4
−1
,v=
−3 5 . Compare A(u + v) and Au + Av.
10 / 10