Lesson 18: Looking More Carefully at Parallel Lines
... In Lesson 7, we recalled some basic facts learned in earlier grades about pairs of lines and angles created by a transversal to those lines. One of those basic facts was: Suppose a transversal intersects a pair of lines. The lines are parallel if and only if a pair of alternate interior angles are e ...
... In Lesson 7, we recalled some basic facts learned in earlier grades about pairs of lines and angles created by a transversal to those lines. One of those basic facts was: Suppose a transversal intersects a pair of lines. The lines are parallel if and only if a pair of alternate interior angles are e ...










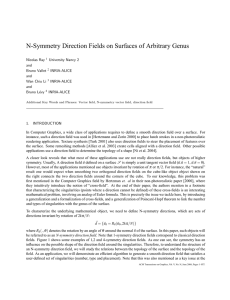
N-Symmetry Direction Fields on Surfaces of Arbitrary Genus
... a generalization and a formalization of cross-fields, and a generalization of Poincaré-Hopf theorem to link the number and types of singularities with the genus of the surface. To characterize the underlying mathematical object, we need to define N-symmetry directions, which are sets of directions ...
... a generalization and a formalization of cross-fields, and a generalization of Poincaré-Hopf theorem to link the number and types of singularities with the genus of the surface. To characterize the underlying mathematical object, we need to define N-symmetry directions, which are sets of directions ...
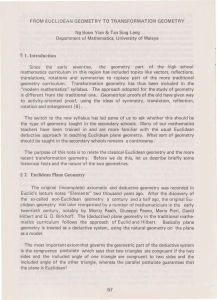
§ 1. Introduction § 2. Euclidean Plane Geometry
... convince himself/herself that a translation is a product of reflections? (How many?) In Euclidean plane geometry, there are three different relations indicated by the same words "is congruent to", one for segments, one for angles and one for triangles. All three can be combined under a generalized d ...
... convince himself/herself that a translation is a product of reflections? (How many?) In Euclidean plane geometry, there are three different relations indicated by the same words "is congruent to", one for segments, one for angles and one for triangles. All three can be combined under a generalized d ...

1.2 Euclid`s Parallel Postulate - Department of Mathematical Sciences
... octahedron, cube, icosahedron, and dodecahedron [42]. For more information about Euclid and his environment, see the number theory chapter. Our focus will be specifically on the controversial parallel postulate in Book I and its ramifications, in particular the angle sum of triangles. Book I begins ...
... octahedron, cube, icosahedron, and dodecahedron [42]. For more information about Euclid and his environment, see the number theory chapter. Our focus will be specifically on the controversial parallel postulate in Book I and its ramifications, in particular the angle sum of triangles. Book I begins ...


GEO_FinalReviewPacket_EW
... Locus a fixed distance from a line: two parallel lines, one on either side. Equidistant from two parallel lines: a parallel line midway between them. Equidistant from two Intersecting lines: bisectors of the vertical angles ; form a right angle to each other. Logic: Inverse: Negate both stat ...
... Locus a fixed distance from a line: two parallel lines, one on either side. Equidistant from two parallel lines: a parallel line midway between them. Equidistant from two Intersecting lines: bisectors of the vertical angles ; form a right angle to each other. Logic: Inverse: Negate both stat ...

Non-Euclidean Geometry, Topology, and Networks
... measures of the angles in any triangle is 180°. In Lobachevskian geometry, the sum of the measures of the angles in any triangle is less than 180°. Also, triangles of different sizes can never have equal angles, so similar triangles do not exist. The geometry of Euclid can be represented on a plane. ...
... measures of the angles in any triangle is 180°. In Lobachevskian geometry, the sum of the measures of the angles in any triangle is less than 180°. Also, triangles of different sizes can never have equal angles, so similar triangles do not exist. The geometry of Euclid can be represented on a plane. ...


Chapter 5: Poincare Models of Hyperbolic Geometry
... The fractional linear transformation, T , is usually represented by a 2 × 2 matrix ...
... The fractional linear transformation, T , is usually represented by a 2 × 2 matrix ...
Riemannian connection on a surface

For the classical approach to the geometry of surfaces, see Differential geometry of surfaces.In mathematics, the Riemannian connection on a surface or Riemannian 2-manifold refers to several intrinsic geometric structures discovered by Tullio Levi-Civita, Élie Cartan and Hermann Weyl in the early part of the twentieth century: parallel transport, covariant derivative and connection form . These concepts were put in their final form using the language of principal bundles only in the 1950s. The classical nineteenth century approach to the differential geometry of surfaces, due in large part to Carl Friedrich Gauss, has been reworked in this modern framework, which provides the natural setting for the classical theory of the moving frame as well as the Riemannian geometry of higher-dimensional Riemannian manifolds. This account is intended as an introduction to the theory of connections.