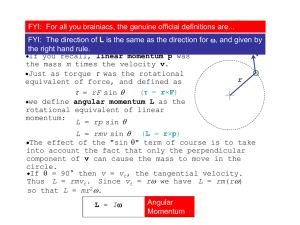
Torque and Motion Relationships
... Here, r (the radius of rotation) is equal to k (the radius of gyration), but that is not the case with extended bodies ...
... Here, r (the radius of rotation) is equal to k (the radius of gyration), but that is not the case with extended bodies ...





1. (14 points) Consider the system of differential equations dx1 dt
... 7. (15 points) Determine whether the following statements are true or false. As usual, briefly justify your answer. Your answer will be graded on its clarity and completeness. (a) If ~v1 , ~v2 and ~v3 are linearly independent vectors in R3 then so are w ~ 1 = ~v1 + ~v2 + 2~v3 , ...
... 7. (15 points) Determine whether the following statements are true or false. As usual, briefly justify your answer. Your answer will be graded on its clarity and completeness. (a) If ~v1 , ~v2 and ~v3 are linearly independent vectors in R3 then so are w ~ 1 = ~v1 + ~v2 + 2~v3 , ...











08 lecture ppt
... forearm parallel to the floor. Assume that the hand is 35.0 cm from the elbow and that the upper arm is 30.0 cm long. The elbow is bent at a right angle and one tendon of the biceps is attached at a position 5.00 cm from the elbow and the other is attached 30.0 cm from the elbow. The weight of the h ...
... forearm parallel to the floor. Assume that the hand is 35.0 cm from the elbow and that the upper arm is 30.0 cm long. The elbow is bent at a right angle and one tendon of the biceps is attached at a position 5.00 cm from the elbow and the other is attached 30.0 cm from the elbow. The weight of the h ...


Practice problems (Rotational Motion)
... (c) z-axis. 2. What would be the kinetic energy of the system if it rotates about the z-axis at 10 rpm? 3. What would be its angular momentum? 7.)A man of mass Mm = 80 kg sits on the edge of a uniform rectangular crate of width 1 m and height 2 m. The crate has a mass of 120 kg. A person tries to ti ...
... (c) z-axis. 2. What would be the kinetic energy of the system if it rotates about the z-axis at 10 rpm? 3. What would be its angular momentum? 7.)A man of mass Mm = 80 kg sits on the edge of a uniform rectangular crate of width 1 m and height 2 m. The crate has a mass of 120 kg. A person tries to ti ...