





a ,b
... can also be expressed in complex form: r e i θ → r e i (θ+ α ) where α is the angle of rotation. (Nice, isn't it?) In R3 the situation becomes a bit more complex. For the most part, things extend nicely from R2 . Since translations are not linear transformations, we omit them here. However, we have ...
... can also be expressed in complex form: r e i θ → r e i (θ+ α ) where α is the angle of rotation. (Nice, isn't it?) In R3 the situation becomes a bit more complex. For the most part, things extend nicely from R2 . Since translations are not linear transformations, we omit them here. However, we have ...





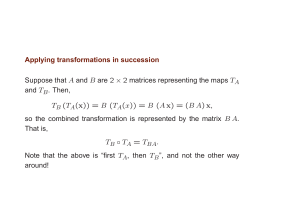
Applying transformations in succession Suppose that A and B are 2
... TB ◦ TA = TBA. Note that the above is “first TA, then TB ”, and not the other way around! ...
... TB ◦ TA = TBA. Note that the above is “first TA, then TB ”, and not the other way around! ...

2.1
... maximum degree k. Then any polynomial of degree larger than k can not be written as a linear combination. ...
... maximum degree k. Then any polynomial of degree larger than k can not be written as a linear combination. ...






Lecture 10 Relevant sections in text: §1.7 Gaussian state Here we
... are n1 n2 scalars in the array of numbers aij in the above expansion of an arbitrary vector in the product basis. The tensor product space is to be a Hilbert space. The scalar product is defined as follows. For product vectors we have hα, β|γ, δi = hα|γihβ|δi. For general vectors we expand them in a ...
... are n1 n2 scalars in the array of numbers aij in the above expansion of an arbitrary vector in the product basis. The tensor product space is to be a Hilbert space. The scalar product is defined as follows. For product vectors we have hα, β|γ, δi = hα|γihβ|δi. For general vectors we expand them in a ...




Document
... So we have to start reconsidering old Physics in order to make it compatible with the 4-dimensional spacetime and special relativity. For the main part, that means turning vectors in 4_vectors. Which means at least to find the “time component” of the 4-vector. Starting, as usual, from the simplest c ...
... So we have to start reconsidering old Physics in order to make it compatible with the 4-dimensional spacetime and special relativity. For the main part, that means turning vectors in 4_vectors. Which means at least to find the “time component” of the 4-vector. Starting, as usual, from the simplest c ...
