
















18 Lecture 18: Central forces and angular momentum
... namely, that for any central potential, angular momentum is a constant of motion. Note that the origin of this conservation law is the fact that the problem has spherical symmetry. Rotation around the origin leaves the potential invariant, implying the conservation of angular momentum. In particular ...
... namely, that for any central potential, angular momentum is a constant of motion. Note that the origin of this conservation law is the fact that the problem has spherical symmetry. Rotation around the origin leaves the potential invariant, implying the conservation of angular momentum. In particular ...


Impulse and Momentum Objectives. 1. Define momentum. 2
... 2. Distinguish between elastic and inelastic collisions. 3. Use conservation principles to solve problems involving elastic and inelatic collisions for initial velocity, final velocity or mass, given the other values. 4. Define impulse; distinguish between impulse and force. 5. Determine the impulse ...
... 2. Distinguish between elastic and inelastic collisions. 3. Use conservation principles to solve problems involving elastic and inelatic collisions for initial velocity, final velocity or mass, given the other values. 4. Define impulse; distinguish between impulse and force. 5. Determine the impulse ...
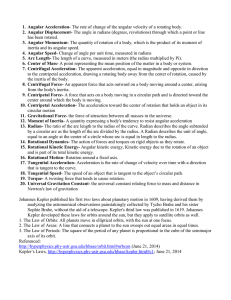
Angular Motion Vocabulary
... 5. Arc Length- The length of a curve, measured in meters (the radius multiplied by Pi). 6. Center of Mass- A point representing the mean position of the matter in a body or system. 7. Centrifugal Acceleration- The apparent acceleration, equal in magnitude and opposite in direction to the centripetal ...
... 5. Arc Length- The length of a curve, measured in meters (the radius multiplied by Pi). 6. Center of Mass- A point representing the mean position of the matter in a body or system. 7. Centrifugal Acceleration- The apparent acceleration, equal in magnitude and opposite in direction to the centripetal ...
