


Chapter Three
... To internetwork is to traverse more than one LAN segment and more than one type of network through a router In an internetwork, the individual networks that are joined together are called subnetworks ...
... To internetwork is to traverse more than one LAN segment and more than one type of network through a router In an internetwork, the individual networks that are joined together are called subnetworks ...

www.winlab.rutgers.edu
... also invalidated if unused for certain interval. – This means unused routes are purged. – Note that the route may still be valid. ...
... also invalidated if unused for certain interval. – This means unused routes are purged. – Note that the route may still be valid. ...

Chapter 4: outline
... When there are no options header length is 20 HLEN = 5 Service type – 8-bit field, allows different types of datagram to be distinguished from each other based on their associated/requested QoS. ...
... When there are no options header length is 20 HLEN = 5 Service type – 8-bit field, allows different types of datagram to be distinguished from each other based on their associated/requested QoS. ...
Design - Berkeley Robotics and Intelligent Machines Lab
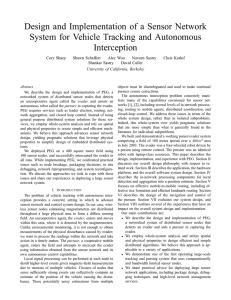
... Elements in the lower tier generally do not need to know much about the track or the identity of the object, as their behavior does not change based on that information. The robots are power intensive and require substantial local processing, hence they are a natural point of concentrated processing ...
... Elements in the lower tier generally do not need to know much about the track or the identity of the object, as their behavior does not change based on that information. The robots are power intensive and require substantial local processing, hence they are a natural point of concentrated processing ...

MS Word - WIDE Project
... In order to use consumer DV devices equipped with IEEE1394 interface, we designed and implemented an IEEE1394 device driver on FreeBSD 3.3[7]. IEEE1394 high speed serial bus system is designed for a packet based shared media computer bus system. The network bandwidth is logically specified from 100M ...
... In order to use consumer DV devices equipped with IEEE1394 interface, we designed and implemented an IEEE1394 device driver on FreeBSD 3.3[7]. IEEE1394 high speed serial bus system is designed for a packet based shared media computer bus system. The network bandwidth is logically specified from 100M ...

Chapter 1: Foundation
... For large file transfer, bandwidth is critical For small messages (HTTP, NFS, etc.), latency is critical Variance in latency (jitter) can also affect some applications (e.g., audio/video conferencing) ...
... For large file transfer, bandwidth is critical For small messages (HTTP, NFS, etc.), latency is critical Variance in latency (jitter) can also affect some applications (e.g., audio/video conferencing) ...

Chapter 1 Slides
... For large file transfer, bandwidth is critical For small messages (HTTP, NFS, etc.), latency is critical Variance in latency (jitter) can also affect some applications (e.g., audio/video conferencing) ...
... For large file transfer, bandwidth is critical For small messages (HTTP, NFS, etc.), latency is critical Variance in latency (jitter) can also affect some applications (e.g., audio/video conferencing) ...




ICMP
... between hosts and routers • Uses IP to route its messages between hosts • Must be implemented with IP • remember, IP is just a packet delivery system • transmits and routes datagrams from sources to destinations through a series of interconnected networks • it has a checksum in the IP header to dete ...
... between hosts and routers • Uses IP to route its messages between hosts • Must be implemented with IP • remember, IP is just a packet delivery system • transmits and routes datagrams from sources to destinations through a series of interconnected networks • it has a checksum in the IP header to dete ...

Constraint-Driven Bus Matrix Synthesis for MPSoC Sudeep Pasricha , Nikil Dutt
... as the full crossbar scheme, if designed carefully. However, the emphasis of their work was not on the generation of such partial crossbar topologies. Although a lot of work has been done in the area of hierarchical shared bus architecture synthesis [12-14] and NoC architecture synthesis [15-16], fe ...
... as the full crossbar scheme, if designed carefully. However, the emphasis of their work was not on the generation of such partial crossbar topologies. Although a lot of work has been done in the area of hierarchical shared bus architecture synthesis [12-14] and NoC architecture synthesis [15-16], fe ...


Lab I: Internet services. Telnet (SSH), E
... The purpose of the Internet layer is to divide TCP segments into packets and send them from any network. The packets arrive at the destination network independent of the path they took to get there. The specific protocol that governs this layer is called the Internet Protocol (IP). Best path determi ...
... The purpose of the Internet layer is to divide TCP segments into packets and send them from any network. The packets arrive at the destination network independent of the path they took to get there. The specific protocol that governs this layer is called the Internet Protocol (IP). Best path determi ...

Document
... topology, this database can be much larger and may limit the maximum size of an area. ...
... topology, this database can be much larger and may limit the maximum size of an area. ...

Windows Server 2008
... • If any station in the ring fails, data can no longer be passed along • FDDI uses dual ring – Data travels in both directions – One ring failure doesn’t break network – Operates using fiber-optic cable at 100 Mbps – Extended star topologies with Gigabit Ethernet have ...
... • If any station in the ring fails, data can no longer be passed along • FDDI uses dual ring – Data travels in both directions – One ring failure doesn’t break network – Operates using fiber-optic cable at 100 Mbps – Extended star topologies with Gigabit Ethernet have ...

Sparse placement of electronic switching nodes
... The difference between ESs and OXCs is important not just from the standpoint of wavelength blocking, which is the most usually studied factor, but also because in practice there is a constraint on the maximum transparent distance that a lightpath may be allowed to traverse without regeneration (i.e ...
... The difference between ESs and OXCs is important not just from the standpoint of wavelength blocking, which is the most usually studied factor, but also because in practice there is a constraint on the maximum transparent distance that a lightpath may be allowed to traverse without regeneration (i.e ...

Chapter 2
... Chapter 8: Mobile All-IP Network Signaling Chapter 9: UMTS Security and Availability Issues Chapter 10: VoIP for the Non-All-IP Mobile ...
... Chapter 8: Mobile All-IP Network Signaling Chapter 9: UMTS Security and Availability Issues Chapter 10: VoIP for the Non-All-IP Mobile ...

Skr4800_CHP7
... -a wireless sensor network is a collection of tiny disposable and lowpower devices -a sensor node is a device that converts a sensed attribute(eg vibration, temp) into a form understandable by users -the device requires sensing module, communication module, memory and a small battery ...
... -a wireless sensor network is a collection of tiny disposable and lowpower devices -a sensor node is a device that converts a sensed attribute(eg vibration, temp) into a form understandable by users -the device requires sensing module, communication module, memory and a small battery ...


Denial of Service Attacks in Cognitive Radio Networks and Counter
... Sybil defense schemes assume that attackers (Sybils) establish links to randomly selected nodes in the network To find out the performance of Sybil defense schemes in targeted attacks, attackers have more control over their link placement to k nodes closest to trusted node. ...
... Sybil defense schemes assume that attackers (Sybils) establish links to randomly selected nodes in the network To find out the performance of Sybil defense schemes in targeted attacks, attackers have more control over their link placement to k nodes closest to trusted node. ...

3rd Edition, Chapter 5
... carry network layer data of any network layer protocol (not just IP) at same time ability to demultiplex upwards bit transparency: must carry any bit pattern in the data field error detection (no correction) connection liveness: detect, signal link failure to network layer network layer address ...
... carry network layer data of any network layer protocol (not just IP) at same time ability to demultiplex upwards bit transparency: must carry any bit pattern in the data field error detection (no correction) connection liveness: detect, signal link failure to network layer network layer address ...