
Mac: new
... Each NIC has a unique identifier, the MAC address MAC: Medium Access Control The MAC address is assigned by the manufacturer, you cannot change it. ...
... Each NIC has a unique identifier, the MAC address MAC: Medium Access Control The MAC address is assigned by the manufacturer, you cannot change it. ...
Course Arrangements: Higher Computing 6
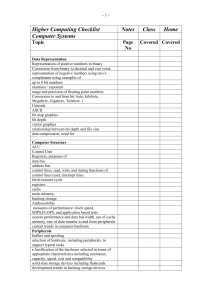
... control lines, read, write and timing functions of control lines reset, interrupt lines fetch-execute cycle registers cache main memory, backing storage Addressability measures of performance: clock speed, MIPS,FLOPS, and application based tests system performance and data bus width, use of cache me ...
... control lines, read, write and timing functions of control lines reset, interrupt lines fetch-execute cycle registers cache main memory, backing storage Addressability measures of performance: clock speed, MIPS,FLOPS, and application based tests system performance and data bus width, use of cache me ...

Homework, sheet 10
... Exercise 3. Suppose an 802.11b station is configured to always reserve the channel with the RTS/CTS sequence. Suppose this station suddenly wants to transmit 1,000 bytes of data, and all other stations are idle at this time. Assume a transmission rate of 11 Mbps. As a function of SIFS and DIFS, and ...
... Exercise 3. Suppose an 802.11b station is configured to always reserve the channel with the RTS/CTS sequence. Suppose this station suddenly wants to transmit 1,000 bytes of data, and all other stations are idle at this time. Assume a transmission rate of 11 Mbps. As a function of SIFS and DIFS, and ...

Embedded System Communication
... A real-time system is often composed from a number of periodic (time triggered) and sporadic (event triggered) tasks which communicate their result by ...
... A real-time system is often composed from a number of periodic (time triggered) and sporadic (event triggered) tasks which communicate their result by ...

Embedded System Communication
... A real-time system is often composed from a number of periodic (time triggered) and sporadic (event triggered) tasks which communicate their result by ...
... A real-time system is often composed from a number of periodic (time triggered) and sporadic (event triggered) tasks which communicate their result by ...

study of response time analysis for can bus
... dashboard switch positions, climate control, window control settings, anti-breaking system control(ABS), fault codes, and diagnostic information. In a high-end vehicle there can be more than 2500 distinct signals for each communication node, for each effectively replacing what would have been a sepa ...
... dashboard switch positions, climate control, window control settings, anti-breaking system control(ABS), fault codes, and diagnostic information. In a high-end vehicle there can be more than 2500 distinct signals for each communication node, for each effectively replacing what would have been a sepa ...
Vehicle Bus_final
... differential voltages. This effectively eliminates the negative effects of interference voltages induced by motors, ignition systems and switch contacts. Twisting of the two lines reduces the magnetic field considerably. Therefore, in practice twisted pair conductors are generally used as the physic ...
... differential voltages. This effectively eliminates the negative effects of interference voltages induced by motors, ignition systems and switch contacts. Twisting of the two lines reduces the magnetic field considerably. Therefore, in practice twisted pair conductors are generally used as the physic ...

CAN_Basics_1 - Renesas e
... Number of masters – Every node can initiate communication and negotiate for the bus ...
... Number of masters – Every node can initiate communication and negotiate for the bus ...


CAN Communication Protocol - University of Wisconsin
... dominant bit and reads a recessive bus level, this is an error. The checksum is a 15 bit polynomial calculation from the start of frame bit through the data bytes. The checksum the frame contains is compared with the checksum the node calculates and if the checksum do not match, an error has occurre ...
... dominant bit and reads a recessive bus level, this is an error. The checksum is a 15 bit polynomial calculation from the start of frame bit through the data bytes. The checksum the frame contains is compared with the checksum the node calculates and if the checksum do not match, an error has occurre ...
Canold
... but a dominant bit from any bus node generates the dominant bus state. A medium must be chosen that is able to transmit the two possible bit states (dominant and recessive). One of the most common and cheapest ways is to use a twisted wire pair. There's no standard defined by CAN regarding connector ...
... but a dominant bit from any bus node generates the dominant bus state. A medium must be chosen that is able to transmit the two possible bit states (dominant and recessive). One of the most common and cheapest ways is to use a twisted wire pair. There's no standard defined by CAN regarding connector ...

Can
... An error frame is generated by any node that detects a bus error. An error frame, shown in Figure 23-6, consists of 2 fields, an error flag field followed by an Error Delimiter field. The Error Delimiter consists of 8 recessive bits and allows the bus nodes to restart bus communications cleanly afte ...
... An error frame is generated by any node that detects a bus error. An error frame, shown in Figure 23-6, consists of 2 fields, an error flag field followed by an Error Delimiter field. The Error Delimiter consists of 8 recessive bits and allows the bus nodes to restart bus communications cleanly afte ...

Presentation on Network Topology
... • They may be connected to other networks via bridges or routers and a large network will probably be a hybrid type i.e. it will involve two or more of these topologies. ...
... • They may be connected to other networks via bridges or routers and a large network will probably be a hybrid type i.e. it will involve two or more of these topologies. ...
Tutorial 1 Questions
... 8. referring to the same figure, assume that the communication is between a process running at computer A with port address i and a process running at computer D with port address j. Show the contents of packets and frames at the network, data link, and transport layer for each hop. ...
... 8. referring to the same figure, assume that the communication is between a process running at computer A with port address i and a process running at computer D with port address j. Show the contents of packets and frames at the network, data link, and transport layer for each hop. ...

pushpavathi_a
... Standard Organization (ISO) and Society Of Automotive Engineers (SAE).The German Company Robert Bosch GmbH, for the automobile industry originally developed the Controller Area Network during the late 1980’s. CAN bus is designed for communication between microcontrollers in an automotive environment ...
... Standard Organization (ISO) and Society Of Automotive Engineers (SAE).The German Company Robert Bosch GmbH, for the automobile industry originally developed the Controller Area Network during the late 1980’s. CAN bus is designed for communication between microcontrollers in an automotive environment ...



UNIT 19 (CAN)
... • Full-CAN devices provide the whole hardware for convenient acceptance filtering and message management. For each message to be transmitted or received these devices contain one so called message object in which all information regarding the message (e.g. identifier, data bytes etc.) are stored. D ...
... • Full-CAN devices provide the whole hardware for convenient acceptance filtering and message management. For each message to be transmitted or received these devices contain one so called message object in which all information regarding the message (e.g. identifier, data bytes etc.) are stored. D ...

1- A well-structured document usually contains a number of clues
... 2- When use the communication link is point-to-point so there is no requirement for network routing. (T) ...
... 2- When use the communication link is point-to-point so there is no requirement for network routing. (T) ...

Controller Area Network (CAN)
... content. Each receiver accepting the message recalculates the CRC and compares it against the transmitted value. A discrepancy between the two calculations causes an error flag to be set. Frame checks that will flag an error are the detection by a receiver of an invalid bit in the CRC delimiter, ACK ...
... content. Each receiver accepting the message recalculates the CRC and compares it against the transmitted value. A discrepancy between the two calculations causes an error flag to be set. Frame checks that will flag an error are the detection by a receiver of an invalid bit in the CRC delimiter, ACK ...
Producer-Consumer Problem
... identifiable object like a computer. (Don’t fail) • Individual computers may be running multiple processes, either by sharing a single processor or on multiple processors. • We assume that the local synchronization among processes in a node is accomplished using shared-memory primitives • Processes ...
... identifiable object like a computer. (Don’t fail) • Individual computers may be running multiple processes, either by sharing a single processor or on multiple processors. • We assume that the local synchronization among processes in a node is accomplished using shared-memory primitives • Processes ...
SERIAL BUS COMMUNICATION PROTOCOLS
... ACK = '1 BIT' and receiver sends back '0' in this slot when the receiver detects an error in the reception. Sender after sensing '0' in the ACK slot, generally retransmits the data frame. Second bit 'ACK delimiter' bit. It signals the end of ACK field. If the transmitting node does not recei ...
... ACK = '1 BIT' and receiver sends back '0' in this slot when the receiver detects an error in the reception. Sender after sensing '0' in the ACK slot, generally retransmits the data frame. Second bit 'ACK delimiter' bit. It signals the end of ACK field. If the transmitting node does not recei ...

Denial of Service Attack on Automotive CAN Networks
... speed bus. The body control system, including door control, seat control, light control, etc. which deal with passenger comfort and convenience, is usually connected by the low speed bus. The dashboard and OBD II bridge two networks. For the physical layer, a twisted pair multidrop cable is specifie ...
... speed bus. The body control system, including door control, seat control, light control, etc. which deal with passenger comfort and convenience, is usually connected by the low speed bus. The dashboard and OBD II bridge two networks. For the physical layer, a twisted pair multidrop cable is specifie ...