Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Oscilloscope wikipedia , lookup
Inertial navigation system wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Operational amplifier wikipedia , lookup
Nanogenerator wikipedia , lookup
Lego Mindstorms wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Tektronix analog oscilloscopes wikipedia , lookup
Josephson voltage standard wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Oscilloscope types wikipedia , lookup
Power MOSFET wikipedia , lookup
Schmitt trigger wikipedia , lookup
Surge protector wikipedia , lookup
Integrating ADC wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Power electronics wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Current mirror wikipedia , lookup
Voltage regulator wikipedia , lookup
Rectiverter wikipedia , lookup
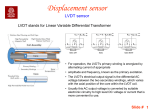
Measurement report on Force and torque sensors For the subject of sensors and transducers Supervisor: ing. Antonín Platil Yann KOWALCZUK October 19th, 2006, 1800-1930 Measurement Laboratory 61 Faculty of Electrical Engineering Czech Technical University in Prague 1. Objectives of the measurement Learn the physical principles and function of the following position sensors: 1) Inductive transformation sensor (inductosyn) with optical incremental sensor 2) Linear variable differential transformer (LVDT) 3) Ultrasonic sensor 2. Measurement task 1) Measure the characteristic of the inductosyn sensor, i.e. the dependence of the voltage across the coils on the moving part (“slider“) on the position, in the range of one mechanical period of the “ruler” (approx. 2 mm). 2) Learn the principle of the LVDT. Measure its characteristic (transfer function); estimate the resolution of the measurement. Measure the characteristic around zero position in detail; focus also on the both end-positions of the sensor. 3) Connect the digital oscilloscope to the outputs of the sensor device and observe the waveforms of the transmitted and received pulse. Measure the time delay between these events, and from the known value of the sound speed in the air calculate the respective distance. Compare the computed value to the reading displayed on the device. 1 3. Schematic diagram Inductosyn sensor Figure 1 - Inductosyn sensor Linear Variable Differential Transformer (LVDT) Figure 2 - LVDT sensor 2 Ultrasonic sensor Figure 3 - Ultrasonic sensor 4. Theory Inductosyn sensor: this device is set up with planar coils on a fixed part, called ruler, while two planar coils are moving on a part called slider. It uses inductive principles with voltage reference, which principles are well known of every student (electronmagnetic theory). The reference value of the position is sensed by an optical incremental sensor MS 30, connected to an intelligent indicator Modig 221. The indicator sensitivity is 1 μm / digit. LVDT sensor: it uses electromagnetic induction principle. A magnetic flux coupling between two coils may be altered by the movement of an object and subsequently converted into voltage. The LVDT is basically a transformer, of which the primary coil is driven by a sine wave with fixed amplitude. An AC signal is induced in the secondary coils. A core made of a ferromagnetic material is inserted coaxially into the cylindrical opening without physically touching the coils. The two secondaries are connected in the opposed phase. When the core is positioned in the magnetic centre of the transformer, the secondary output signals cancels and there is no output voltage. Moving the core away from the central position unbalances the induced magnetic flux ratio between the secondaries, developing an output. The amplitude of the induced voltage is proportional, in the linear operating region, to the core displacement. Consequently, voltage may be used as a measure of a displacement. The LVDT provides the direction sensing as well as magnitude of the displacement. The direction is determined by the 3 phase angle between the primary (reference) voltage and the secondary voltage (output). The output voltage represents how far the core is from the centre and on which side. Ultrasonic sensor: this sensor employs the sonar-principle, i.e. it measures the round-trip time interval between the emitted ultrasonic pulse and received reflected “echo”. For creating and receiving the ultrasonic pulse, only one ultrasound transducer is used (piezoelectric device). 5. Procedure 1.) The inductosyn sensor was used to complete 30 measurements of position, using an incremental optical sensor as a reference. Voltages of both secondary coils were estimated with multimetres, while output signals were observed through a digital 4 way oscilloscope. As multimetres couldn’t display the sign of the AC waveform, a reference point was taken on the oscilloscope to determine the sign of the voltage measured. The frequency was set at 100 kHz. 2.) The LVDT sensor was connected to a digital multimetre, while a precision graduated rubber was used for position measurement. Position for zero voltage was measured, and 5 measures for both sides of this region were made, using 10mm steps each time. 3.) The ultrasonic sensor was used to determine the height of the ceiling in the lab. Then, analysis of the waveform of this sensor was performed on the digital oscilloscope. Time between two pulses was estimated by this way, thus providing another estimation of the ceiling of the room. Reference height was determined by measurement with a graduated rubber. 4 6. Measurement 1). Inductosyn A zero position was first determinated with the oscilloscope: primary voltage was 0, while secondary voltage was maximum. Then 30 measurements were made, using 10 µm position steps. The voltage value for each position is recorded in the following table: Position x (µm) 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 260 270 280 U1(x) (mV) U2(x) (mV) ArcTan(U2(x)/U1(x)) U1²(x)+U2²(x) 0,01 4,61 1,568627133 -1,37 4,37 -1,266999644 -2,52 3,74 -0,977873714 -3,45 2,89 -0,697298726 -4,27 1,41 -0,318937622 -4,49 0,01 -0,002227168 -4,32 -1,14 0,258007242 -3,56 -2,7 0,648872588 -2,66 -3,6 0,934444337 -1,15 -4,37 1,313472612 0,04 -4,49 -1,561887876 1,22 -4,29 -1,293728574 2,41 -3,71 -0,994705386 3,44 -2,77 -0,677923393 4,11 -1,54 -0,358504004 4,37 0,01 0,002288326 4,25 1,02 0,235544981 3,69 2,34 0,56514944 2,76 3,39 0,887481104 1,61 4,06 1,193266131 0,06 4,37 1,557067212 -0,99 4,22 -1,340366161 -2,28 3,68 -1,016114719 -3,52 2,86 -0,682316555 -3,95 1,73 -0,412808795 -4,34 0,02 -0,004608262 -3,91 -1,81 0,433542481 -3,32 -2,76 0,693552037 -2,65 -3,38 0,905873251 Table 1 - Inductosyn measurements 21,2522 20,9738 20,338 20,2546 20,221 20,1602 19,962 19,9636 20,0356 20,4194 20,1617 19,8925 19,5722 19,5065 19,2637 19,097 19,1029 19,0917 19,1097 19,0757 19,1005 18,7885 18,7408 20,57 18,5954 18,836 18,5642 18,64 18,4469 5 The following characteristic was determined according to these values: Output Voltage VS Position 6 4 Voltage (mV) 2 0 0 50 100 150 200 250 300 U1(x) U2(x) -2 -4 -6 Position (µm) Figure 4 - Characteristic of Output Voltage VS Position The function ArcTan (U2/U1) was also calculated in the above table:, in order to determine the dependence of this function with the position of the slider. This can be seen on the following graph: ArcTan(U2/U1) VS Position 2 1,5 1 ArcTan(U2/U1) 0,5 0 0 50 100 150 200 250 300 -0,5 -1 -1,5 -2 Position (µm) Figure 5 - ArcTan(U2/U1) relation to position of slider 6 As we can see with these two graphs, U1 and U2 are shifted by a ¼ of a mechanical period. Furthermore, the sum U1²(x)+U2²(x) was calculated in the above table to show that it only slightly depends on the position of the slider. 2) LVDT The LVDT setup was used to perform several measurement, in order to obtain its characteristic, and especially around the 0V area. The 0 value was thus a starting point, giving the relative position associated with this value. Then, 5 measures in each direction from this point were performed, to obtain the characteristic of this system. The results are given in the next table: Position (mm) U(x) (V) 95 1,028 96 0,82 97 0,615 98 0,402 99 0,193 100 0 101 -0,22 102 -0,419 103 -0,626 104 -0,843 105 -1,046 Table 2 - LVDT measurements These measurements were compiled to obtain the following graph, representing the characteristic of the LVDT. We can notice that the voltage VS position curve of the LVDT is linear, associated with the linear scale of the precision rubber. 7 Voltage VS Position 1,5 1 Voltage (V) 0,5 0 94 96 98 100 102 104 106 -0,5 -1 -1,5 Position (mm) Figure 6 - LVDT Voltage VS Position characteristic The resolution of the LVDT depends on the stages of the sensor processing; but as far as we could see, this one has an infinite resolution, the minimum scaled change being too little to be noticed. 3) Ultrasonic The ultrasonic sensor was positioned vertically on the table, in order to measure the height of the ceiling in the lab. It must be reminded that the wave emitter is 12 cm upper than the base plate of the sensor. The digital oscilloscope was plugged on the output of the device to watch the waveform of the signal. We could hear small bips when the result was ready and displayed on the device, and some low frequency sound, when the impulses were generated. 3 different kinds of measure were performed: The value given by the apparatus was 8,1 feet=2,47m. A reference measure was performed using a graduated rubber, giving a height of 2,33 m. 8 The waveform displayed was a train of impulses (outgoing and back signals), and the result response was displayed as a big impulse on the scope. The time measured between 2 impulses was 13,68 ms (for going and back of the signal). Thus, with the given speed of the sound formula v(t)=331,8+0,6T, T being the temperature of the room (measured with a scaled thermometer, T=22°C), the result was a height of 2,36 m with this method. The error factor to be taken in account is the unequal repartition of the temperature in the room. Indeed, as hotter air is going in up while colder air is staying near the ground, a gradient of temperature exists, and has actually some impact on the velocity of the sound in air. 7. Results and conclusion 1) The inductosyn sensor was the device that took most of the time during the measurement. We could see that a complete step was proceeded when both waveforms completed total phase shift (i.e. 360°), for about a 2mm distance measured. The signals from the two secondary’s coils had a ¼ phase shift. Thus, the different output voltage of both coils can be interpreted as a position change, the distance between the units being known. Of course, interpretation of this measure is better made after processing of the signal output, as a direct position value for common sensing and applications. Some electronic kits and circuitry are available to proceed such signal processing. This requires some additional development of the device to make it practically usable in common applications. Moreover, the system involves some mechanical parts which can be sometimes loose or inaccurate, making it more suitable for small position changes. As a result, the inductosyn is not a widely used sensor nowadays, usually replaced by more common systems, but it remains an interesting contact less measurement device. 2) After looking at its principle, the LVDT sensor was used to perform several measurements on precise position steps. We could notice that the output voltage was really sensitive and fastly following the positions change. Around its 0 position, the 9 sensor has a linear comportment, making it really suitable and easily usable for measurement tasks. Furthermore, it was established that its resolution is virtually infinite (of course depending of course of the signal processing of the results), the smallest scaled change of step being unnoticeable during the lab. Specific circuitry also exists for this device, giving extended signal processing of the measurement for applications. For these reasons, the LVDT is a very useful device for precise position changes, even with fast moving systems, and with outstanding results for low position changes. 3) The ultrasonic sensor gave fast and easily usable results, by indicating the distance from the device to the obstacle. Then this position measurement could be compared to the two others ways of measurement: the time between outgoing and incoming pulses, and the reference rubber measurement. These two last have quite close results, giving a good idea of the error margin of the apparatus. As an average value, the ultrasonic sensor has about 5% margin of error. Such an error can be explained by the fact that the display on the device has only one decimal range precision, with a US foot unit reading (conversion in metric system introducing furthermore errors); thus, the precision of the measurement suffers from these factors. Anyway, such an error factor is still acceptable for most applications, making it a useful device for long range and higher positions measurements. Finally, we can notice along this lab that the most useful devices for position measurements are the LVDT and the ultrasonic sensors. The first is mostly usable for really precise measurement on small position changes, the second one giving a good approximation of higher distances measurements. On another hand, for contact less measurement, the inductosyn sensor should be preferred, to perform some small position changes estimation. 10