Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
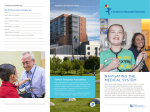
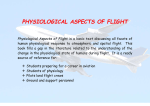
Graduate Category: Degree Level: Abstract ID# Engineering and Technology PhD 1330 Physiological Closed-Loop Control For Smart Medical Systems 1 Candelino , 2 Jalili , Nicholas Paneed 1 3 Nader Jalili and Dagmar Sternad 1 Piezoactive Systems Laboratory, Department of Mechanical Engineering 2 Behavioral Neuroscience Department, College of Science 3 Departments of Biology, Electrical and Computer Engineering, and Physics Northeastern University, Boston MA Clinician and Controller: Controller Works as An Asset to Clinical Staff Designed for Reliability and Fault Tolerance Utilizing Robust and Adaptive Approaches Clinicians can Always Override the Controller Alert Clinicians to Unusual/Unsafe Situations 𝑹 Desired Clinical Results: Hypnosis and Analgesia Neuro-blockade Maintain Normal SO2 Avoid Hypo/Hyperglycemia Maintain Normal Heart Rhythm Desired Result Σ Patient/Therapy Model: Inter/Intrapatient variability Actuator Dynamics Pharmacokinetics Pharmacodynamics Time Delays and Possible Interruptions 𝒀 𝑷 𝑪 Patient Health Clinician & Controller Qualitative Health Indicators: Consciousness and Cognition Comfort/Discomfort Pain Mobility Fatigue Patient & Therapy Delivery 𝑯 Sensed Patient Health Additional Factors: Surgical Disturbances Unexpected/Excessive Exercise Movement Measurement Noise Unmodeled Drug Interactions Sensing Patient Health: Measurable States Only • EEG or BIS • SpO2, Heart Rate, Temperature, etc. Health/Signal Correlation Sensor Dynamics Abstract Challenges Recent advances in medical sensing devices have enabled the accurate measurement of physiological signals; however, the long-standing patient-clinician-device paradigm still remains largely unaffected and/or in its infancy stage because most modern medical devices are not capable of performing self-regulation of applied therapeutic actions. As a result, the effectiveness of these machines heavily depend on several external factors; such as the ones mentioned below: The design of controllers for physiological systems is among the most demanding of any application. • • • • Manual adjustment provides limited resolution, precision, and range The quality of regulation depends on the frequency of visits from clinical staff The guidelines used to perform adjustments may not be well suited to a particular patient Uncertainties in the assessment of a patient’s condition may obscure the conversion from intended results to the manual adjustment of settings By designing self-regulating, self-adapted behaviors into therapeutic delivery systems, clinical treatments can be applied with a higher degree of confidence. While such instruments may or may not contain integral sensing equipment, they should be equipped with on-board signal processing and control systems. These systems will leverage modern processing techniques to make real-time adjustments based on data from multiple simultaneously acquired physiological signals. Proper tuning and adaptation may result in instruments that are robust against a variety of possible conditions in the patient population. Instead of being a decoupled combination of blind devices, these devices will, in turn, become more intelligent and capable of making decisions guided by the principles of physiology and closed-loop control to perform personalized treatment or drug administration as intended by clinicians. The dynamics of a physiological system can vary across the general population and even within a single patient. These systems may have several unknowns, only a small number of measureable states, and many potential disturbances. Any device interacting directly with patients may directly influence their well being and need to achieve the highest levels of safety during operation and protections against faults such as missing signals. Method Investigate the patient, therapy, and sensing models currently being used to find an optimal control ready representation, applying reduction techniques if necessary. Further, these models can be used to help determine performance specifications. Survey methods of Robust and Adaptive Control theory, both currently used in PCLC and applied in other industries, to find optimal control approach. In most cases, it will be beneficial to apply control techniques which incorporate adaptive or variable gains (see Figure 1) to maintain system stability for the largest possible population. Control Inputs Goal 𝑪 This research is aiming to devise methods for controller development and system level design which fully take into account the many safety and operational considerations necessary in patient-in-the-loop systems. Ultimately, this may lead to resilient, smart medical systems which provide an enhanced clinical experience, a higher quality of care, and an increase in promising patient outcomes. Key Benefits • Suppress effects of interpatient variability • Allow clinicians to concentrate on higher level tasks • Reduce sensitivity to uncertainty and external disturbances • Avoid dosage under/overshoot • Reduction of cost due to minimization of unnecessary drug consumption and shorter time spent by patients in postoperative care units • Allow each clinician to treat more patients Σ (To Plant) Control Action Estimator Gain Modifications Adaptation Law + Σ – (From Sensors) Figure 1: Example of Variable Gain Adaptive Control Scheme Conclusions Once proper design and evaluation methodologies for PCLC systems are established, the path to replacing our outdated pumps, injections, clinical guidelines, and alarms will be cleared. Smart Medical Systems will likely be adopted wherever feasible, increasing the potential for achieving optimal patient outcomes and perhaps more advanced care in hospitals, during transportation, and in the home.