Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Modified Newtonian dynamics wikipedia , lookup
Fictitious force wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Center of mass wikipedia , lookup
Length contraction wikipedia , lookup
Classical central-force problem wikipedia , lookup
Seismometer wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Mass versus weight wikipedia , lookup
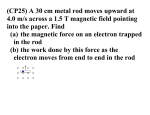
Quiz 3 SOLUTIONS — PHYS 121, Summer 2010 There were 35 points possible on this quiz. 1. A child runs across the grass, and then makes a running jump into a wagon (initially at rest). The child-carrying wagon rolls for a distance across the grass before coming to a stop. If the child has a mass of 20 kg and the wagon has a mass of 15 kg, the coefficient of rolling friction is 0.1, and the child is moving at 5 m/s when she jumps in the wagon, how far does the wagon roll before coming to a stop? (10 points) This was a two-part problem. To find the distance the loaded wagon rolled, you needed to find its initial velocity. That in turn came from the conservation of momentum, because this is an inelastic collision where a child (initially running at 5 m/s) jumps into a wagon (initially at rest) and the combination of them rolls off. The momentum equation is mchild v child = m child wagon v child wagon . We know the masses, and we can get to mchild m 20 kg 20 m v childwagon = v child = 5 = . That gives us the initial mchild mwagon s 20 kg 15 kg 7 s velocity of the loaded wagon. We need the acceleration of the wagon, which is due to the frictional force. That in turn is F friction = n = m g , and with F = m a we get to F friction m g a = = = g . We know the final velocity is zero, and we want the total m m displacement, so we use v 2f = v 2i 2 a x , and with algebra (and plugging in the zero final v 2i v 2i 20/7 m/s 2 velocity) we get to x = = = = 4.16 m. 2a 2g 2⋅ 0.1⋅9.8 m/s 2 2. A streetlight can be modeled like two rods at a right angle with a weight at the end of one of them (see figure at right). The vertical rod is 10 m long and has a mass of 200 kg. The horizontal rod is 4 m long and has a mass of 40 kg. Finally, there is a 25 kg lamp mounted at the end of the horizontal rod. The streetlight is bolted to the ground at its base. (a) What is the magnitude of the torque exerted on the base of streetlight by the bolts holding it to the ground? (10 points) (b) What is the moment of inertia of the streetlight when pivoting around its base? (5 points) On part (a), the direct, brute-force way to do this starts with the torque being given by = R F sin . Because the streetlight is not moving, the torque exerted by the bolts at the base of the streetlight is equal in magnitude (and opposite in direction) to the gravitational torque exerted by the parts of the streetlight. We aren't asked about the direction, so we can simply find the total of the gravitational torques of the streetlight parts. The torques due to the individual parts of the streetlight all have the same sign (one is zero); the ones due to the horizontal rod and the lamp are trying to rotate the streetlight clockwise in the diagram above. Remember that the force of gravity exerted by an object ... or part of an object, as here ... acts as if all the mass is located at the center of gravity for that object. For a symmetric object, the center of gravity is located at the geometric center of the object. So, we have three parts to the streetlight: the vertical rod, the horizontal rod, and the lamp at the end of the horizontal rod. The centers of gravity of the two rods are at the centers of the rods PHYS 122, Quiz 3 solutions page 1 of 3 themselves. So we can write total = vertical rod horizontal rod lamp . Each individual torque is = R F sin , where R is the distance from the part's center of gravity to the pivot point (here, the streetlight base) and F is the gravity force on that part, and θ is the angle between the two. For the vertical rod, θ is 180°, because the vector from the lamp base to the center of gravity of the rod is directly up, while the gravity vector is straight down, and since sin 180 ° = 0, the torque exerted by the vertical rod is zero. For the horizontal rod, the center of gravity of the rod is 10 meters up (so y = 10 m) and 2 meters from the vertical rod (so x = 2 m), so R = 10 m2 2 m2 = 104 m. The angle θ is the inverse tangent (arc tangent) of 2/10, and the force is F = m g = 40 kg 9.8 N /kg = 392 N. For the lamp, R = 10 m2 4 m2 = 116 m , F = 25 kg 9.8 N /kg = 245 N , and θ is the inverse tangent of 4/10. So now we can sum up the parts: total = 0 104 m 392 N sin tan−1 0.2 116 m 245 N sin tan−1 0.4 and when you grind through the arithmetic, that is a total of 1784 N m. NOTE: An alternative way to do this one – much shorter, but you have to understand the geometry and see what R ⊥ really is – is to use = R ⊥ F. Extend the direction of the force vector (here, that's straight down) past the pivot point, and construct a perpendicular to this extended force vector line through the pivot point. Then R ⊥ is the distance along that perpendicular between the pivot point and the extended force direction line. That sounds horrible when expressed in words, but it's easier to see in the figure at right. The force vectors point straight down from the centers of gravity (c.o.g.'s) of the three parts of the streetlight. The extended line for the vertical rod is at the center of that rod but is embedded entirely inside the rod; it passes through the pivot point, so R ⊥ is zero. The one extending downward from the c.o.g. of the horizontal rod passes through the ground 2 m away from the pivot point, and the ground is perpendicular to that extended force line, so that 2m is R ⊥ . The same kind of argument holds for R ⊥ for the lamp being 4 m. So you avoid the unpleasant math of computing R and θ if you see the geometry. Then you can use = R⊥ F , using the 2 m and 392 N for the horizontal rod and 4 m and 245 N for the lamp, and you end up at the same 1784 N m result. Part (b) is computing the moment of inertia, and for that we use I = ∑ M R 2 , where R is the distance of the center of mass of the part from the pivot point. The R-values for this part are (mercifully) the same as the R values for part (a), and since we ducked the location of the center of gravity of the vertical rod, that is simply the middle of that rod, 5 m above the base. So we can write I = 200 kg 5 m2 40 kg 104 m 2 25 kg 116 m2 = 1.206 × 10 4 kg m 2 . 3. A bungee cord is stretched by 20 cm beyond its original 50 cm length when 15 kg is hung on the end of it. (a) What is the spring constant of the bungee cord? (5 points) (b) How far is it stretched when it has 22 kg hung on the end of it? (5 points) Since F = −k x , k = PHYS 122, Quiz 3 solutions N / kg = 735 N⋅m ∣Fx∣ = 15 kg 9.8 0.2 m for part (a). page 2 of 3 On part (b), x = 22 kg 9.8 N /kg F = = 0.293 m. k 735 N⋅m PHYS 122, Quiz 3 solutions page 3 of 3