Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Go (programming language) wikipedia , lookup
Stream processing wikipedia , lookup
Library (computing) wikipedia , lookup
C Sharp (programming language) wikipedia , lookup
Structured programming wikipedia , lookup
Supercomputer architecture wikipedia , lookup
Program optimization wikipedia , lookup
Software bug wikipedia , lookup
Interpreter (computing) wikipedia , lookup
Very long instruction word wikipedia , lookup
Verifying Architecture
Jaein Jeong
Johnathon Jamison
1
Introduction
Processors are more vulnerable to
transient errors due to small feature
size.
Can detect transient errors with more
stable processors and execute
instructions again if an error occurs.
Overhead won't be high for errors
occurring rarely.
2
Introduction (Cont.)
DIVA: verifies execution each
individual instruction with a second,
slower.
Our idea: a dual-processor verification
system.
Proof-carrying code: A proof of safety
accompanies executable code.
Our idea: executable code is annotated
with invariants.
3
Assumptions
We assume there are no permanent
errors.
Thus we need not worry about
invariants failing always.
So, processor can work correctly if it is
verified by a more stable processor.
4
Assumptions (Cont.)
We assume the processor operates
correctly most of the time.
Therefore it is reasonable to check for
errors rarely.
The overhead is not problematic, for
errors occur rarely.
5
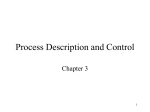
System Structure
Implemented as two communicating
processors.
The main processor executes instructions and
sends the verifier all its registers.
If the verifier confirms the execution, the
main continues to execute instructions.
Otherwise, the main processor loads the old
register values and re-executes its instructions.
6
System Structure (Cont.)
7
Programming for SimpleScalar
Since gcc can not handle everything, we
intervene at the assembly code level.
After changing the assembly code, we compile
it to object code.
The message passing system calls qread and
qwrite are not implemented in gcc.
So, we insert the syscall instruction and
pass arguments by explicitly filling registers.
8
Programming for SimpleScalar
(Cont.)
addiu $2,$0,258
la
$4,MQO
subu $5,$16,4
move $6,$0
syscall
Writing a message to a queue
$L2:
addiu $2,$0,259
la
$4,MQI
addu $5,$sp,16
move $6,$0
syscall
bne
$7,$0,$L2
Reading a message from a queue.
9
Programming interface for C
Assembly language programming is error
prone and unproductive.
We wrote a interface for C with macros and
inline assembly.
Since syscall is not accessible in C, we
generate a “jal syscall” in assembly.
A Perl script replaces it with “syscall”.
Now we can compile the assembly code
without further modification.
10
Multiprocessor Program Example
long regs[32];
char msg[]="\006\000\000\000cool\n";
long nullmsg[]={0};
char MQI[]="\003min";
char MQO[]="\004mout";
…
qwrite(MQO,msg,0,error);
do {
qread(length,MQI,regs,0,error);
} while(error);
…
11
Passing Invariants (1st method)
The main program sends the invariant
instructions as a message.
We enclosed the invariant instructions
with .rdata and .text directives and
insert the length of the message
after .rdata.
Then the main can send the instructions
as a message.
The verifying processor then can load its
registers with it, and do a jal to the
message that was sent.
12
Passing Invariants (2nd method)
Generate a verifying program specific to the
main program.
When running the main program, just send
the the contents of registers and the invariant
number.
The verifying processor takes the invariant
number, calculates the value of the invariant,
and replies.
13
Passing Invariants (Cont.)
A bit of a problem for the first method.
The verifying program receives invariant
instructions as data.
Execution of those instructions would bring
up the same issues as self-modifying code.
Due to pitfalls of first method, we chose the
second method.
14
Using Invariants
We maintain two sets of registers in the
verifier for roll back purposes.
Not all registers must be sent to the
verifier, just those needed for the
invariant or possible rollback.
Currently, creating the verifier requires
careful inspection of the main program
We hope to automate some of this.
15
Performance
For best performance, the main
processor should not check for the
invariant reply immediately.
Rather, check when the next invariant
is reached, so to give time for
verification.
Then the read is done, and execution is
rolled back or continued as appropriate.
16
Tidbits
The message passing mechanism took
time to understand.
We found we could use the asm
directive in gcc so hand modification of
assembly was minimized.
We encountered a couple bugs in
SimpleScalar.
17
Future Work
Additional logic for floating point
registers, easily extended from what we
have now.
Memory rollback logic; this is more
substantial, for we need to retire
memory writes only on invariant
confirmation.
A program to generate the verifying
program automatically.
18
Thoughts
Seems like this is an energy intensive
method of verification.
Invariants are not easy to generate, and
must be done by hand.
There is a large amount of processing
overhead.
19
Summary
Decreasing feature size makes
verification necessary.
DIVA is on attempt to address the
problem.
We wrote programs for SimpleScalar.
This showed that we can have one
processor verify another with invariants.
20
Acknowledgement
Mark Whitney:
– Our work is based on the SimpleScalar
multiprocessing extension, written by him.
– He also helped us configure SimpleScalar
and fixed bugs.
21