Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
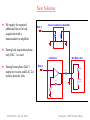
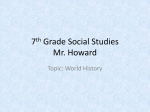
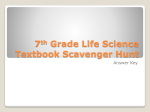
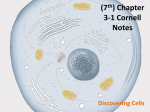
ILIAS – WG1 Hierarchical suspension control G.Losurdo INFN Firenze Virgo Superattenuator • PASSIVE isolator • Designed with 3 points of actuation: – Inverted pendulum – Marionette – Recoil mass • Local controls – Inertial damping of internal modes (IP) – Pre-alignment/damping of the payload modes (optical levers on marionette/mirror) • Global control: locking correction distributed hierarchically over the three actuation points ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Digital Controls • • DSP 1: sends correction for inertial damping and tide control to IP actuators DSP 2: sends correction for local controls/AA/locking to marionette/RM actuators ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Control electronics • Digital electronics (16 bit ADC – DSP – 20 bit DAC) • DSP characteristics: – Clock frequency 60 MHz – 2 poles/2 zeroes filter in 330 nsec – 3x3 matrix-vector product in 1 msec – Max. sampling freq. 160 kHz (used at 10 kHz) – Frequency accuracy at 10 kHz: df=2.5 mHz ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Inverted pendulum • Gravity as antispring: low resonant frequency f0 • Pre-isolation effect • Low control forces: 1 2 k g m l F m0 x 2 – f0=40 mHz, m=1 ton, l=6 m, x =1 cm F = 0.6 N !! • Ideal as control platform: soft actuation ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Sensors/Actuators • Inertial sensors: – DC-100 Hz bandwidth – Equivalent displacement sensitivity: better than 10-11 m/rt(Hz) • Displacement sensors: – Used for DC-0.1 Hz control – Sensitivity: 10-8 m/rt(Hz) – Linear range: few cm • Coil magnet actuators: – Linear range: few cm ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Control strategy • From a MIMO to 3 SISO systems:diagonalization with respect to IP modes ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Inertial Damping performance Inverted pendulum motion 24 hrs Rms over long periods 1 mm Fringe signal d/dt(L2- L1) ~ 0.25 mm/s ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino x Blending the sensors • Low frequency position control is needed because: – Inertial sensors do not provide DC error signal – Inertial sensors response at f<40 mHz can be spoiled by tilt • Problem: blend the sensors – dominating the tilt effect – minimizing the seismic noise re-injection – Simplyfing the control strategy Accel. LVDT x x dt x x0 Highpass x + Lowpass Highpass + Lowpass = 1 ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino • • The seismic noise filtering depends on L(s) The loop design is independent on the L(s) cutoff a H l L x L x0 2 s ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Local control setup • • Optical levers read both the mirror and the marionette Marionette control allows larger bandwidth t o SA’s f ilt er 7 ( F7 ) ( F7) act uat or CCD-MIRROR dist ance =12 5 0 mm CCD f ocal L. = 2 5 mm Apert ure = 1 8 mm incidence 3 0 o 1 .4 mW red laser diode - SM f iber Err( x y ) opt ical port s CCD halogen illuminat or act uat or XY 1 4 mW red laser diode - SM f iber f =2 0 0 mm incidence 35 o ( z) beam axis Err( x y ) opt ical port s f =2 0 0 mm PSD device on t he f ocal plane XY dif f usive markers XY Err( x y ) PSD device on t he f ocal plane Err( z) PSD device on t he image plane ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino • • Marionette error signal allows a bandwidth of 2-3 Hz Uncontrolled resonance (1.2 Hz) exists: needs blending with mirror error signal ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Hierarchical control • • Required locking accuracy: Tidal strain over 3 km: dL 10-12 m dL 10-4 m The required dynamic range can be covered by two stages. The third one helps for bandwidth/noise issues… Tide/drifts compensation Control of the resonances Widening the bandwidth… ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino SA local sensing IP LVDTs/ACC F7 LVDTs Marionette PSD Mirror PSD ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino SA sensing • IP and F7 diagonalized with respect to VRS (P.Ruggi, S.Braccini, F.Frasconi) P.Ruggi ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino RM actuation • • • RM actuators can compensate up to 100 mm (in high power/high noise configuration) Tidal strain can be larger Locking is lost Power in the cavity ILIAS-WG1– July 7th, 2004 IP position Correction to mirror G.Losurdo – INFN Firenze-Urbino Tide Control • Re-allocation of the low frequency (<10 mHz) correction to the IP Cavity transmission Correction to the mirror Suspension point position 24 h ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino C4 run • Tide control: data vs prediction ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino 16 mHz – the problem • • • Main rotational mode of the SA Long decay time, large elongation. Hard to be controlled from the marionette Braccini, Vicerè 1 1 2 2 3 3 4 4 1 7 ILIAS-WG1– July 7th, 2004 7 G.Losurdo – INFN Firenze-Urbino 16 mHz – solution • Damp it off using F7 actuators! ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino F7 control • • • • Hardware/software for F7 control implemented on the NE tower 16 mHz resonance control activated Used either with or without LC Possibility to control other “dangerous” SA modes to be studied error signal Open loop gain ILIAS-WG1– July 7th, 2004 correction G.Losurdo – INFN Firenze-Urbino Locking from the RM: noise • • Reference mass actuators dynamics: 100 mm DAC noise: 300 nV/Hz1/2 Actuators noise: current status -5 A.Gennai 10 Reference Mass - Mirror Actuators Noise Filter #7 - Marionetta Actuators Noise VIRGO Sentivity -10 m/Hz 1/2 10 -15 10 -20 10 -1 10 ILIAS-WG1– July 7th, 2004 0 10 1 10 Frequency (Hz) 2 10 3 10 G.Losurdo – INFN Firenze-Urbino Standard design Coil Driver Actuators noise: current status -5 10 Ref. Mass Coil DAC RCoil 10 + OUT Reference Mass - Mirror Actuators Noise Filter #7 - Marionetta Actuators Noise VIRGO Sentivity LCoil 3mH R2 R -10 10 m/Hz 1/2 1 - R1 R 2 -15 10 -20 10 -1 0 10 10 1 10 Frequency (Hz) 2 10 3 10 DAC noise: 300 nV/sqrt(Hz) (17.5 effective bits) Coil Driver noise: 80 nV/sqrt(Hz) ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Noise Reduction Coil Driver Ref. Mass Coil DAC + RCoil 10 RN OUT 500 - 1 LCoil 3mH R2 R R1 R 2 To reduce the DAC noise we should insert a resistor in series with coil driver. To get closer to VIRGO specs, the resistor value should be about 500 ohms. Bigger values could be used if force will be enough to keep the cavities locked. The resistor limits the maximum force we can apply and therefore makes lock acquisition very difficult (impossible?) ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino New Solution We supply the required additional force for lock acquisition with a transconductive amplifier. Transconductance Amplifier DAC 1 During lock acquisition phase only DAC 1 is used. Coil Driver During linear phase DAC 1 output set to zero and DAC 2 is used to keep the lock. Ref. Mass Coil DAC 2 + RCoil 10 RN OUT 500 - 1 LCoil 3mH R2 R R1 R ILIAS-WG1– July 7th, 2004 2 G.Losurdo – INFN Firenze-Urbino Basic Equations Transconductance Amplifier DAC 1 Force g mVDAC1 RN 1 VDAC2 RN Z Coil RN Z Coil Coil Driver g m 0.3 2 RN 500 3 Z R L s 10 3 10 s Coil Coil Coil VDAC g1 zCorr 1 VDAC2 g 2 zCorr • • Lock Acquisition: g1 = 1, g2 = 0 Linear Regime: g1 = 0, g2 = 75 ILIAS-WG1– July 7th, 2004 Ref. Mass Coil DAC 2 + RCoil 10 RN OUT 500 - 1 LCoil 3mH R2 R R1 R 2 Force 0.3 zCorr g1 g2 75 Note: coil pole shifted above 20 kHz G.Losurdo – INFN Firenze-Urbino High power – low noise switch 8 Coil Up Coil Down 6 2 -4 2.04 x 10 2.03 0 2.02 2.01 -2 switch Transmitted Power Current Monitor 4 -4 -6 2 1.99 1.98 1.97 1.96 -8 1.95 0 10 20 30 Time (sec) ILIAS-WG1– July 7th, 2004 40 50 60 1.94 0 10 20 30 Time (sec) 40 50 G.Losurdo – INFN Firenze-Urbino 60 Noise figures • DAC noise expected (?) @100 Hz: 3 10-16 m/Hz1/2 • Virgo design sensitivity @100 Hz: 2 10-19 m/Hz1/2 • Required noise reduction @100 Hz: 1500 • • Using tide control allows to reduce the required correction by a factor 100 Re-allocating locking to the marionette in the SA resonance region should provide the residual attenuation ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Correction to the mirror in C4 • • Marionette control with 3 Hz bandwidth allows to reduce the correction by 50 (Vp= 2 mV) Coil driver gain could be reduced by a factor 5000 50 Vp=0.1 V To be re-allocated to marionette ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Mechanics of the last stages • Complicated dynamics, important couplings… ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Use of SA simulation • SA simulation has been important to design the marionette control strategy: – Tuning of SIESTA to reproduce the measured TF – Use of tuned simulation to estimate and subtract the couplings due to the sensing – Calculation of a filter to compensate for x marionette motion induced by longitudinal forces LC tuning: S.Avino, E.Calloni, I.Fiori SA mode tuning: I.Fiori, A.Vicerè ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Marionette TF matrix Fz FTx FTy I.Fiori z Tx Ty ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino • • Using 4 coils to move the marionette along z: reduce the z-x coupling Good data-simulation agreement I.Fiori, A.Gennai I.Fiori, S.Avino ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Mechanics • The two mechanical TF are different – For the structure around 1 Hz – For the asymptotical slope 1/f2 1/f4 ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino “Modified” marionette • Adding two zeroes makes the marionette TF “very similar” to the RM one 1/f2 ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino 1st scheme: composed lock ACQ • • Advantage: simpler, no need of transition Drawback: marionette control bandwidth limited by higher ITF noise (no SSFS) In the DSP In the GC PHD L(s)(s+s0)2 zCorr Locking compensator H(s) cavity power ILIAS-WG1– July 7th, 2004 RM correction marionette correction G.Losurdo – INFN Firenze-Urbino 2nd scheme: re-allocation • • Advantage: allows wider marionette bandwidth To be tested with AA and SSFS In the DSP Anti-Ramp L(s)(s+s0)2 Ramp 10s H(s) In the GC zCorr Locking compensator PHD cavity power ILIAS-WG1– July 7th, 2004 RM correction marionette correction G.Losurdo – INFN Firenze-Urbino Filters • • To blend the two systems use usual strategy L(s) = 3rd order low pass filter, H(s) = 1-L(s) ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Hierarchical control • The north cavity has been locked by distributing the forces over the three SA stages: the controllability of the SA has been demostrated 0.01-1 Hz microns DC-0.01 Hz 1-50 Hz ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Performance with no AA/SSFS Mirror displacement correction over the two stages ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino C4 data - extrapolation • • C4 data (noisy stretch) have been filtered with current hierarchical control TFs to predict the correction one expects on the RM when SSFS is ON Expected zCorrrms= 3 mV. L.Holloway ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino • One should consider peak values of zCorr instead of rms. In C4, over 18 hrs: zCorrpeak ~ 10 zCorrrms Peak correction • • rms correction With hierarchical control in the present configuration one can assume: zCorrpeak ~ 30 mV Therefore, the coil driver gain can already be reduced by ~ 300 We are not far from Virgo sensitivity… New promising design is being tested in MATLAB (L.Holloway) ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Interaction with angular control • • • The alignment/power fluctuations are larger when hierarchical control is ON This is a concern: to be tested with AA Larger statistics needed, analysis going on Standard locking Hierarchical locking ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino Next steps • • • Test hierarchical locking with linear alignment Widen the bandwidth of marionette control Switch to low noise coil driver after re-allocation ILIAS-WG1– July 7th, 2004 G.Losurdo – INFN Firenze-Urbino