Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
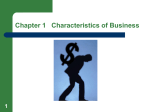
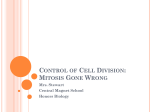
User-Friendly Checkpointing and Stateful Preemption in HPC Environments Using Evergrid Availability Services Keith D. Ball, PhD Evergrid, Inc. Oklahoma Supercomputing Symposium October 3, 2007 1 Overview • Challenges for Large HPC Systems • Availability Services (AVS) Checkpointing • AVS Performance • Preemptive Scheduling • AVS Integration with LSF on Topdawg • Conclusions • About Evergrid 2 Challenges for Large HPC Systems Robustness & fault tolerance: Long runs + many nodes = Increased likelihood of failure Need to insure real-time and compute-time “investment” in long computations Scheduling: need “stateful preemption” capability for efficient and optimal fair-share scheduling Without stateful preemption: High priority jobs terminate low priority jobs, forcing them to restart from the beginning Increases average throughput time, decreases utilization rate Maintenance: long time to quiesce system;hard to do scheduled (or emergency) maintenance without killing jobs 3 Relentless Effect of Scale MTBF (hour) 1 MTBF (1 R N ) 140 120 100 80 60 40 20 0 2048 4096 8192 16384 32768 65536 131072 System Size N R 0.9999 0.99999 0.999999 4 What Happens in the Real World? System #CPUs Reliability ASCI Q 8,192 MTBI: 6.5 hrs (114 Unplanned outages/month) ASCI White 8,192 MTBF: 5 hrs (01), 40 hrs (05) PSC Lemieux 3,016 MTBI: 9.7 hrs Google 15,000 20 reboots/day, 2-3% replaced/yr Source: D. Reed, High-end computing: The challenge of scale, May 2004 5 Solution Requirements How about a checkpoint /restart (CP/R) capability? Need the following features to be useful in HPC systems: • “Just works”: allows users to do their research (and not more programming!) • No recoding or recompiling: allows application developers to focus on their domain (and not system programming) • Requires transparent, standardized CP/R: restart and/or migrate application between machines without side effects • CP/R must be automatic and integrate with existing use of resource managers and schedulers to fully realize potential 6 Evergrid Availability Services (AVS) • Implemented via dynamically-linked library libavs.so – Uses LD_PRELOAD env. variable = no recompiling! • Completely asynchronous and concurrent CP/R • Incremental checkpointing – Fixed upper bound on checkpoint file size – Tunable “page” size • Application/OS Transparent – Migration capable – Stateful preemption for both serial and parallel jobs • Integrates with commercial and open-source queuing systems: LSF, PBS, Torque/Maui, etc. 7 Technology: OS Abstraction Layer Application Application Application User Space AVS Server/ OS Pool App Lib App Lib App Lib OS Abstraction OS Abstraction OS Abstraction OS OS System Space OS Interconnect OS Abstraction Layer Key Features • Decouples applications from the operating system • Transparent fault tolerance for stateful applications • Pre-emptive scheduling Distributed: N nodes running the same/different apps Transparent: No modifications to OS or application Performance: <5% Overhead 8 What Do We Checkpoint? AVS virtualizes the following resources used by applications to ensure transparent CP/R: Memory •Heap •mmap()’d pages •Stack •Registers •Selected shared libs Files •Open descriptors •STDIO streams •STDIN, STDOUT •File contents (COW) •Links,Directories Network •BSD Sockets •IP Addresses •MVAPICH 0.9.8 •OFED, VAPI Process •Process ID •Process group ID •Thread ID •fork(), Parent/Child •Shared Memory •Semaphores 9 Checkpoint Storage Modes Shared-filesystem checkpointing • Best for jobs using fewer ( < ~ 16 ) processors • Works with NFS, Lustre, GPFS, SAN, …. Local-disk checkpointing • More efficient for large distributed computations • Provides for “mirrored checkpointing” – Backup of checkpoint in case checkpointing fails or ruins local copy – Provides redundancy: checkpoint automatically recovered from the mirror if local disk/machine fails 10 Local Disk Checkpointing & Mirroring 11 Local Disk Checkpointing & Mirroring 12 Interoperability Application types: • • • • Parallel/distributed Serial Shared-memory (testing) Stock MPICH, MVAPICH (customized), OpenMPI (underway) Interconnect fabrics: • Infiniband, Ethernet (p4, “GigE”), 10GigE • Potential Myrinet support via OpenMPI Operating Systems: • RHEL 4, 5 (+ CentOS, Fedora) • SLES 9, 10 Architecture: 64-bit Linux (x86_64) Supported platforms, apps, etc. are customer-driven 13 Tested Codes QA-certified codes and compilers, with many more in the pipeline Compilers • Pathscale • Intel Fortran • Portland Group • GNU Compilers Benchmarks • Linpack • NAS • STREAM • IOzone • TI-06 (DoD) apps Academic Codes • LAMMPS, Amber, VASP • MPIBlast, ClustalW-MPI • ARPS, WRF • HYCOMM Commercial Codes • LS-DYNA • StarCD (CFD) • Cadence and other EDA apps underway 14 Runtime & Checkpoint Overhead Virtualization and checkpoint overheads are negligible ( < 5%) with most workloads With AVS 0.2% 1.4% 0.9% 1.2% 0.5% W/ 1 chkpt/hr 2.6% 3.3% 1.3% 2.1% 3.5% 15 Memory Overhead On a per node basis, the RAM overhead is constant: 16 Preemptive Scheduling High Priority Queue Running Jobs Checkpoints Low Priority Queue Increases server utilization & job throughput by 10-50% based on priority mix 17 17 Integration with LSF: Topdawg @ OU Topdawg cluster at OSCER • 512 dual-core Xeon 3.20 GHz, 2MB cache, 4GB RAM • RHEL 4.3, kernel 2.6.9-55.EL_lustre-1.4.11smp • Using Platform LSF 6.1 for resource manager and scheduler Objective: Set up two queues with preemption (“lowpri” and “hipri”) • lowpri Long/unlimited run time, but preemptable by hipri • hipri Time-limited, but can preempt lowpri jobs e.g.: Have long-running (24-hour) low-priority clustalw-mpi job, which can be preempted by 4-6 hour ARPS and WRF jobs 18 Integration with LSF: Topdawg @ OU Checkpointing and preemption under LSF • Uses echkpnt and erestart for checkpointing/preempting and restarting • Allows use of custom methods “echkpnt.xxx” and “erestart.xxx” • Checkpoint method defined as environment variable, or in lsf.conf • Checkpoint directory, interval, and preemption defined in lsb.queues Evergrid integration of AVS into LSF • Introduces methods echkpnt.evergrid and erestart.evergrid to handle start, checkpointing, and restart under AVS • Uses Topdawg variables MPI_INTERCONNECT, MPI_COMPILER to determine parallel vs. serial, IB vs. p4, run-time compiler libs • User sources only one standard Evergrid script from within bsub script! 19 Integration with LSF: Topdawg @ OU In environment (/etc/bashrc, /etc/csh.cshrc): export EVERGRID_BASEDIR=/opt/evergrid Before starting job: export MPI_COMPILER=gcc export MPI_INTERCONNECT=infiniband At the top of your bsub script: ## Load the Evergrid and LSF integration: source $EVERGRID_BASEDIR/bsub/env/evergrid-avs-lsf.src Submitting a long-term preemtable job: bsub -q lowpri < clustalw-job.bsub Submitting a high-priority job: bsub -q hipri < arps-job.bsub 20 What’s Underway • Working with OpenMPI - Support for Myrinet • Growing list of supported applications -EDA, simulation, … • Configure LSF for completely transparent integration 21 Conclusions Evergrid’s Availability Services provides: • Transparent, scalable checkpointing for HPC applications • Compute time overhead of < 5% for most applications • Bounded, nominal memory overhead • Eliminates impacts of hardware faults • Ensures jobs run to completion • Seamless integration into resource managers and schedulers for preemptive scheduling, maintenance and job recovery 22 Reference Ruscio, J.F., Heffner, M.A., and Srinidhi Varadarajan, IEEE International Parallel and Distributed Processing Symposium (IPDPS) 2007, 26-30 March 2007, pp. 1 - 10. 23 About Evergrid Vision: Build a vertically integrated management system that makes multi-datacenter scale-out infrastructures behave as a single managed entity HPC: Cluster Availability Management Suite (CAMS): Availability Services (AVS), Resource Manager (RSM) Enterprise: DataCenter Management Suite: AVS, RSM Enterprise, Live Migration, Load Manager, Provisioning Founded: Feb. 2004 by Dr. Srinidhi Varadarajan (VA Tech, “SystemX”), B. J. Arun Team: 50+ employees: R&D in Blacksburg, VA and Pune, India. HQ in Fremont, CA. Patents: 1 patent pending, 6 patents filed, 2 in process 24 Acknowledgements • NSF (funding for original research) • OSCER (Henry Neeman , Brett Zimmerman, David Akin, Jim White) 25 Finding Out More To find out more about Evergrid Software, contact: Keith Ball Sales: Natalie Van Unen 617-784-8445 [email protected] Partnering opportunities: Mitchell Ratner 510-668-0500 ext. 5058 [email protected] [email protected] http://www.evergrid.com Note: Evergrid will be at booth 2715 at the SC07 conference in Reno, Nevada Nov 13-15. Come by for a demo and presentation on other products 26