Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Electrification wikipedia , lookup
Wireless power transfer wikipedia , lookup
Voltage optimisation wikipedia , lookup
Electric power system wikipedia , lookup
History of electric power transmission wikipedia , lookup
Buck converter wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Distributed control system wikipedia , lookup
Control system wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Power electronics wikipedia , lookup
Mains electricity wikipedia , lookup
Grid energy storage wikipedia , lookup
Resilient control systems wikipedia , lookup
Life-cycle greenhouse-gas emissions of energy sources wikipedia , lookup
Alternating current wikipedia , lookup
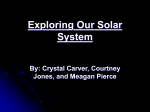
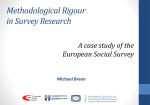
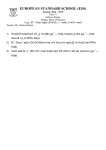
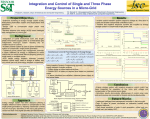
Aalborg Universitet Equalization Algorithm for Distributed Energy Storage Systems in Islanded AC Microgrids Aldana, Nelson Leonardo Diaz; Hernández, Adriana Carolina Luna; Quintero, Juan Carlos Vasquez; Guerrero, Josep M. Published in: Proceedings of the 41th Annual Conference of IEEE Industrial Electronics Society, IECON 2015 DOI (link to publication from Publisher): 10.1109/IECON.2015.7392827 Publication date: 2015 Document Version Accepted manuscript, peer reviewed version Link to publication from Aalborg University Citation for published version (APA): Aldana, N. L. D., Hernández, A. C. L., Quintero, J. C. V., & Guerrero, J. M. (2015). Equalization Algorithm for Distributed Energy Storage Systems in Islanded AC Microgrids. In Proceedings of the 41th Annual Conference of IEEE Industrial Electronics Society, IECON 2015. (pp. 004661 - 004666). IEEE Press. DOI: 10.1109/IECON.2015.7392827 General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. ? Users may download and print one copy of any publication from the public portal for the purpose of private study or research. ? You may not further distribute the material or use it for any profit-making activity or commercial gain ? You may freely distribute the URL identifying the publication in the public portal ? Take down policy If you believe that this document breaches copyright please contact us at [email protected] providing details, and we will remove access to the work immediately and investigate your claim. Downloaded from vbn.aau.dk on: September 17, 2016 Equalization Algorithm for Distributed Energy Storage Systems in Islanded AC Microgrids ∗† , Adriana C. Luna∗ ∗ ∗ Nelson L. L. Dı́az Dı́az∗† Nelson , Adriana C. Luna∗ ,, Juan Juan C. C. Vásquez Vásquez∗,, and and Josep Josep M. M. Guerrero Guerrero∗ ∗∗Department Department of of Energy Energy Technology, Technology, Aalborg Aalborg University, University, Aalborg, Aalborg, Denmark Denmark †† Faculty of Engineering, Universidad Distrital F. J. C., Bogotá, Colombia Faculty of Engineering, Universidad Distrital F. J. C., Bogotá, Colombia [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected] [email protected] www.microgrids.et.aau.dk www.microgrids.et.aau.dk Abstract—This paper paper presents presents aa centralized centralized strategy strategyfor forequalequaAbstract—This lizingthe thestate stateofofcharge chargeof of distributed energy storage systems izing distributed energy storage systems in in an islanded microgrid.The Thestrategy strategy isis based based on on aa simple simple an islanded ACacmicrogrid. algorithm denoted denoted as as equalization equalization algorithm, algorithm, which which modifies modifies the algorithm the charge or or discharge discharge ratio ratio on on the the time, time, for for distributed distributed energy energy charge storage systems systems, within within aa determined order to storage determined period periodofoftime timein in order equalize the the statestate of charge. The The proposed approach has been to equalize of charge. proposed approach has testedtested in a MATLAB/Simulink modelofof the the microgrid microgrid where where the been in a MATLAB/Simulink the performance of of the the proposed proposed strategy strategy was was verified. verified. performance Keywords—Distributed energy energy storage storage systems, systems, Droop Droop control, control, Keywords—Distributed Equalization algorithm, State of Charge. Equalization algorithm, State of Charge. I. IINTRODUCTION NTRODUCTION I. A microgrid microgrid is is an an integration integration of of distributed distributed energy energy reA resources, loads and energy storage units into a controllable sources loads and energy storage units into a controllable system, which which is is able able to to operate operate either either in in grid grid connected connected or system, or islanded mode [1]. Particularly, islanded microgrids play an islanded mode [1]. Particularly, islanded microgrids play an important role role when when economic economic and and environmental environmental issues issues do do not important not allow interconnection with the main power grid [2]. Nowadays, allow interconnection with the main power grid [2]. Nowadays, renewable energy energy sources sources (RES) (RES) such such as as photovoltaic photovoltaic and and wind renewable wind turbine generators have been widely used in order to replace turbine generators have been widely used in order to replace traditional coal, coal, oil oil and and other other non-renewable non-renewable energy energy resources. resources. traditional Consequently, energy storage systems (ESS) have become an Consequently, energy storage systems (ESS) have become an indispensable element into a microgrid based on RES units for indispensable element into a microgrid based on RES units for smoothing the intermittent nature of RES’s [3]. smoothing the intermittent nature of RES’s [3]. As a matter of fact, the current trend is oriented to As a matter of fact, the current trend is oriented to distributed ESS’s instead of aggregated ESS’s. To be more distributed ESS’s instead of aggregated ESS’s. To be more precise, an ESS is associated to each RES integrated into precise, an ESS is associated to each RES integrated into a microgrid. As a result, more redundancy, energy support, a microgrid. As a result, more redundancy, energy support, and constant power production can be ensured when RES and constant power production can be ensured when RES are used [4]–[7]. Valve regulated lead-acid (VRLA) batteries are used [4]–[7]. Valve regulated lead-acid (VRLA) batteries are commonly used in islanded microgrids, since they offer are commonly used in islanded microgrids, since they offer a good commitment between deep-cycle life, transportability, aavailability good commitment between deep-cycle transportability, and cost [7], [8]. Fig. 1 showslife, the basic scheme of availability and cost [7], [8]. Fig. 1 shows the basic scheme an islanded microgrid composed by two RES, two ESS’s and of an islanded microgrid composed by two RES, two ESS and the load. the load. On top of that, when distributed ESS’s are used, it is On topcoordinated of that, when distributed ESS them are used, it is required required operation between in order to avoid coordinated operation them instorage order to deep-discharge in onebetween of the energy unitavoid and deepoverdischarge of theDifferences energy storage unitSoC andcould over-charge in charge in intheone others. at the limit the the others. Differences at the SoC could limit the life-time life-time of the ESS with the smallest SoC, since this ESS of with tothebigger smallest since this[9]. ESS will be willthebeESS exposed deepSoC, of discharge Therefore, exposed biggerare deep of discharge [9]. Therefore, when the the when theto ESS’s charged, it is desirable to prioritize ESS are charged, it is desirable to prioritize the charge of the charge of the unit with the smallest state of charge (SoC). On unit with the when smallest charge (SoC). the On unit the contrary, the contrary, the state ESS’sofare discharged, with the when the ESS are discharge, the unit with the highest SoC WT AC Bus AC/AC Converter DC/AC Bidirectional Battery Array Converter AC Bus IL IL Zrot IWT V WT Vbat ESS Primary Control RES Primary Control Battery Array DC/AC Bidirectional Converter AC Bus AC Bus IL IL I bat Vbat ESS Primary Control I bat DC/AC Converter Load VPV PV Array I PV RES Primary Control Fig. 1: 1: Islanded Islanded AC AC microgrid microgrid configuration. configuration. Fig. should provide moreprovide powermore to the microgrid the others highest SoC should power to the than microgrid than in order energy balance [11].[10], [11]. the otherstoinensure order stored to ensure stored energy[10], balance Commonly, droop droop control control strategies strategies are are used used in in order order to to achieve power sharing sharing between between units units [12]. [12]. Therefore, Therefore, conconventional loops for for power power sharing sharing at at each each ESS ESS are is ventional control control loops complemented with adaptive strategies which adjust the droop complemented with adaptive strategies which adjust the droop coefficients coefficients in in accordance accordance to to the the SoC. SoC. In In this this way, way, itit isis possible possible to to reach reach asymptotic asymptotic approach approach of of the the SoC. SoC. At At this this sense, several different approaches have been proposed sense, several different approaches have been proposed for for equalizing such as as in equalizing the the SoC SoC atat distributed distributed ESS’s ESS such in [6], [6], [7], [7], [13]–[19]. of them them have have been been applied applied to to DC dc [13]–[19]. However, However, all all of microgrids. microgrids. In In addition, addition, equal equal capacity capacity isis assumed assumed for for all all the the distributed distributed ESS. ESS. Besides, Besides, the the equalization equalization time time isis very verysensitive sensitive to the parameters of the equalization functions. to the parameters of the equalization functions. Because Because of of this, this, the the stability stability of of the the system system can can be be compromised compromised when when shorter shorter equalization equalization times times are are sought. sought. Another Another approach approach which which considers differences at the capacity of the energy considers differences at the capacity of the energy storage storage unit unit is is presented presented in in [6]. [6].In Inthis thiscase, case,the theESS’s ESS are are based based on on electricelectricdouble-layer double-layer capacitors capacitors rather rather than than on on batteries. batteries. Although, Although, the the stored stored energy energy is is balanced, balanced, long long time time and and additional additional control control loops loops are are required. required. This paper proposes a new function for the energy manThis paper a new functionacfor the energy manageagement systemproposes (EMS) of an islanded microgrid based on a ment system (EMS) of an islanded AC microgrid based on a centralized equalization algorithm which achieves asymptotic centralized equalization algorithm which achieves asymptotic approach of the SoC at distributed ESS based on batteries. The approach equalization of the SoC atalgorithm distributed ESS based on batteries. The proposed weights the droop coefficients proposed equalization algorithm weights the droop coefficients of the droop control loops, within a defined window of time, of the droop control asymptotic loops, within a definedofwindow of time, in order to obtain approach the SoC. The in order to obtain asymptotic approach of the SoC. The adaptive value of the droop coefficients is bounded what adaptive value of the droop coefficients is bounded what ensures the stability of the microgrid. Simulation results in the stability of the of microgrid. Simulation results in aensures MATLAB/Simulink model the microgrid show the effecativeness MATLAB/Simulink model of the microgrid show the effecof the proposed model even under differences at the tiveness of model even under differences at the capacity of the eachproposed ESS. capacity of each ESS. mportant to say that this paper will only consider the of the microgrid when the ESS’s are being charged rged. Anyhow, the operation of the microgrid should emented by appropriate charge strategies that avoid overcharge in batteries, such as [7],will and [19], ItItisthe to that paper only consider isimportant important to say say that this thisin paper will only consider the the operation of the microgrid when the ESS’s are being charged operation of the microgrid when the ESS’s are being operationor of actions the microgrid the ESS’s s load-shedding, for when limiting the deep of charged or discharged. Anyhow, the operation of the microgrid microgrid should should or Anyhow, ordischarged. discharged. Anyhow, the the operation operation of of the of the batteries as proposed in [20]. be complemented by appropriate charge strategies that avoid Z* =Z*-m P 0 Bat1 Z Z* Z* Z* Z (rad/sec) Z (rad/sec) (rad/sec) Z Z =Z Z *-m P P =Z*-m P Z= Z*-m Z 00 Bat2 Bat2=Z*-m 00P Bat1 Bat1 0 Bat2 Z Z Z Z Z P 0 Bat1 Bat1 = P (a) Z (rad/sec) (W) PP (W) Bat1 (a) (a) Z=Z*-m D P P (W) Bat2 P P P =P Bat2 Bat1 Bat2 Bat1= Bat2 ted in orderThe to obtain equalization of Section SoC. After Z* The paper paper isis organized organized as as Follows. Follows. Section Section II II explains explains the the follows. on III presents the centralized equalization algorithm, operation operationof ofthe themicrogrid microgrid and and how how conventional conventional droop droop control control Z Z (rad/sec) (rad/sec) y sectionsloops IVadjusted andadjusted Vininpresent resultsof are order to obtain SoC. After Z are adjusted order toSimulation obtain equalization ofofand SoC. Z* are in order to obtainequalization equalization SoC. After Z* that, section III presents the centralized equalization algorithm,Z=Z*-m0D1PBat1 that,section sectionIII IIIpresents presentsthe thecentralized centralized equalization equalization algorithm, that, ns respectively. I. Z=Z*-m P 0 Bat2 be becomplemented complemented by by appropriate appropriate charge charge strategies strategies that that avoid avoid excessive overcharge in the batteries, such as in [7], and [19], excessive overcharge in the batteries, such as in [7], and [19], aper is organized as Follows. Section II explains the as well as load-shedding, or actions for limiting the deep as well as load-shedding, or actions for limiting the deep of as well as load-shedding, or actions for of of the microgrid how conventional droop control Z (rad/sec) discharge of the batteries as proposed in [20]. discharge of batteries as in dischargeand ofthe the batteries as proposed proposed in [20]. and finally andfinally finally sections sections IV IV and and V V present present Simulation Simulation results results and and simulation conclusions respectively. conclusionsrespectively. respectively. conclusions Z (rad/sec) Z=Z*-m D P 0 2 Bat2 Z Z==Z Z*-m *-m0DD2P PBat2 *-m DD PP ZZ==ZZ*-m Bat2 000 22 Bat2 0 1 Bat1 Bat2 00 22 Bat2 Z=Z*-m D P Z *-m0D D1P PBat1 Z==Z Z*-m 0 1 Bat1 ZZ Z==Z Z*-m *-m DD P P Z 00 11 Bat1 Bat1 Z* Z* 0 1 Bat1 D ROOP C ONTROL L OOP A DJUSTMENT P II. DDROOP ROOP CCONTROL ONTROL LLOOP OOP A DJUSTMENT ROOP ONTROL II. D ROOPC ONTROL L OOP A ADJUSTMENT DJUSTMENT II. 0 2 Bat2 (rad/sec) ZZ(rad/sec) P Bat1 P PBat1 Bat1 (b) P (W) Bat2 P PBat2 Bat2 P P (W) Bat1 (c) PPBat2 Bat2 Bat2 PPBat1 Bat1 P (W) (W) P P (W) (W) P Bat1 P Bat2 (c) (c) (b) ally, in an islanded microgrid all the primary conFig. 2: Active power sharing: (a) for equal droop coeffiNormally, in an islanded microgrid all the primary conNormally, in an islanded microgrid all the primary conNormally, in an islanded microgrid all themode primary conequal droop droop coefficoeffisharing: (a) (a) for for equal Fig. 2: Active power sharing: coeffire typicallytrollers set up operate are typically set up to operate in voltage control mode trollers areto typically setin upvoltage to operate operatecontrol in voltage voltage control control mode mode cients,cients, (b) (b) weighted droop coefficients for ESS discharging, trollers are typically set up to in ESS discharging, discharging, coefficients for weighted droop coefficients coefficients for ESS y following conventional control strategy. In (VCM) by following conventional droop control strategy. In weighted (VCM) by following followingdroop conventional droop control strategy. strategy. (VCM) by conventional droop control In charging. coefficients for for ESS coefficients ESS charging. (c) weighted droopcoefficients coefficients (c) droop for ESS charging. this way, isispossible possible to regulate the bus voltage and frequency thisto way, possible toregulate regulate thebus busvoltage voltage and frequency frequency it is possible regulate the bus voltage and frequency this way, itititis to the and and achieve good power sharing between units [12]. Even and achieve good power sharing between units [12]. Even achieve good power sharing between [12]. Even eve good and power sharing between units [12].units Even PP though,this thisapproach approachis notthe themost most advisable advisable for for intermittent intermittent though, this approach isisnot not the most advisable for intermittent though, P his approach is not theasasmost advisable for intermittent Bat1 sources such RES units, which are more likely to operate sources such RES units, which are more likely to operate sources such as RES units, which are more likely to operate m under algorithms of maximum power tracking (MPPT) in order uch as RES units, which are more likely to operate under algorithms of maximum power tracking (MPPT) in order under algorithms of maximum power tracking (MPPT) in order PP toobtain obtainfrom frompower themthe the maximum(MPPT) amount of ofin available energy. tomaximum obtain from them the maximum amount of available energy. orithms ofto tracking order energy. them maximum amount available P Because of of this, this, RES RES units units assume assume the the role role of of grid-following grid-following Bat2 from themBecause the maximum amount of available energy. units, behaving as current sources and their primary primary control are units, behaving current their are Because of as this, RESsources units and assume the rolecontrol of gridm of this, RES units assume role of grid-following set up up toto operate operate on the current control mode (CCM) (CCM) [20], [21]. set on current control mode [20], [21]. following units, behaving as current sources and their primary Consequently, the ESS units assume the role of ofcontrol grid-forming Consequently, ESS units assume role grid-forming controllers are the setand up their to operate onthe current aving as current sources primary control are mode units operating inConsequently, VCM being(CCM) the ESS responsible of regulating regulating units operating in VCM being the responsible of (CCM) [20], control [21]. units assume the role operate on current mode [20], [21]. thegrid-forming AC bus. bus. Meanwhile, Meanwhile, they will will be charged charged orresponsible discharged the AC they be or discharged of units operating in VCM being the of the the equalization Fig. 3: Expected behavior of equalization algorithm. algorithm. ently, the ESS units thethe role of grid-forming order compensate power unbalance between the inin regulating order toto assume compensate power unbalance the of the ac bus. the Meanwhile, they willbetween be charged rating in or VCM being the responsible regulating generated and consumed consumed power [19].of the generated and [19]. discharged in order topower compensate power unbalance Timeis (1) is(s)now now rewritten back to the point, equation (1) rewritten as as follows follows between the generated and consumed power [19]. bus. Meanwhile, they will be charged or discharged When the the ESS ESS units units are are in in the the process process of of charge charge or Fig. 3: Expected behavior When ∗ of the equalization algorithm. ω = ω ∗ − m ·· α (2) αthe Pequalization ii ·· P Bati Bati to compensate unbalance discharge, thepower powerunits balance is managed managed by P P −charge droop Fig. 3: Expected behavior00of algorithm.(2) discharge, the power balance by − ωω droop Whenthe the ESS are is in thebetween process ofthe or control power loops [12]. Therefore, themanaged frequency atPthe the common and consumed [19]. control loops Therefore, the frequency common discharge, the [12]. power balance is byat −ω droop E QUALIZATION LGORITHM III. equation QUALIZATION LGORITHM to the point, (1) is AAnow rewritten as follows AC bus is established by the following equation, AC bus is established by the following equation, control loops [12]. Therefore, the frequency at the common back ac account when the weighting factors αi are determined. To get The algorithm is based on the fact that of the ESSbusunits are inbythe process equation, of charge or is established the∗∗∗following fact rewritten that the the rate rate of change change back to the point, equation as follows = ωω − −m m000 ··PPBati (1) ωdirectly = ω ∗proportional − m(1)0 the ·isαnow ·P (2) Bati ωω = (1) ito Bati Bati of the SoC is directly the battery power of the SoC is proportional to the battery power , the power balance is managed by P − ω droop ∗ ∗ ω = ω − m0 · αi · PBati (2) ω = ω − m0 · PBati (1) the droop coefficient,at is the thecommon angular frequency frequency where m000 isis the P ∝ m SoCi (3) oops [12]. where Therefore, the frequency the droop coefficient, ωω is angular m PBati (3) Bati ∝ mSoCi ∗∗∗ is the reference of the angular III. E QUALIZATION A LGORITHM at the common bus, ω at the common bus, ω is the reference of the angular s established bymthe following equation, where droop coefficient, ω is the angular frequency 0 is the where m is the rate of change for the SoC at each ESS. SoCiIII. LGORITHM where mSoCi is theE QUALIZATION rate of change A for the SoC at each ESS. frequency, the active power at each eachofi-th i-th ESS unit Bati bus, frequency, PPBati isis the power at unit Bati at the common ω ∗active is the reference theESS angular Foralgorithm that reason, reason, is by based adjusting m itit is achieve SoCi The on the fact that theto of change For that by adjusting m is possible possible torate achieve (i = [1, · · · , n]) and n is the number of distributed active SoCi (i = [1, · Bati , n]) and is the power numberat ofeach distributed ∗ · ·P is then active i-th(1) ESSactive unit The algorithm isthebased on the fact thatESS the as rate of change an equalization of SoC at distributed is shown in ωfrequency, = ω − m · P an equalization of the SoC at distributed ESS as is shown in 0 Bati generators (RES+ESS)). When the same droop coefficient of the SoC is directly proportional to the battery power generators (RES+ESS)). When the same droop coefficient (i = [1, · · · , n]) and n is the number of distributed active of Fig.the3.SoC is directly proportional to the battery power Bat1 Bat2 88 88 88 86 86 86 Bat1 Bat1 Bat1 (Decreases) (Decreases) (Decreases) m m mSoC1 SoC1 SoC1 84 84 82 82 82 80 80 (Decreases) SoC1 SoC SoC (%) (%) 84 Bat2 Bat2 Bat2 (Increases) (Increases) (Increases) SoC (%) 78 78 80 m mSoC2 m SoC2 SoC2 76 76 78 76 74 72 (Increases) 74 74 SoC2 72 72 70 70 70 68 68 68 000 11 1 2 22 333 444 555 666 777 Time Time (s) (s) Time (s) 70 68 0 (m000))isis applied applied to each each ESS ESS unit,the thesame powerdroop is shared shared equally (m to unit, the power is equally generators (RES+ESS)). When coefficient Fig. 3. 1 2 3 4 5 6 7 between ESS units units as as we can see see in Fig. Fig.frequency 2a. coefficient, ω we is can the angular ∝mm (3) PBati (3) First of of all, all, the the P SoC at each ESS is between ESS in 2a. 0 is the droop Bati SoCi SoCi First SoC at ∝ each ESS is estimated estimated by by ampereampere(m 0 ) is applied to each ESS unit, the power is shared equally ∗ hour (Ah) (Ah) counting counting method ommon bus, ω is the reference of the angular hour method between ESS units as we can see in Fig. 2a. Under the the discharge discharge process, process, for for balancing balancing the the SoC, SoC, the the mSoCi rate of of change forfor the the SoC SoC at eachatESS. Under Δt wherewhere mSoCi is isthetherate change each ESS. y, PBati isESS the active power at each i-th ESS unit ESS with the highest highest SoC should supply more power power to to the the Δtit is possible I (τ )to Bati For that reason, by adjusting m achieve with the SoC should supply more I (τ ) SoCi Under the discharge process, for balancing the SoC, the Bati SoC(Δt) = SoC(0) − η dτ (4) For that reason, byof SoC(0) adjusting mSoCiηBati itESS isC possible achieve Bati microgrid than the others. On On the other hand,active when the the ESS − dτ to (4) Bati = Bati Bati · · · , n]) and nwithis the thehighest number of the distributed microgrid than the others. other anSoC(Δt) equalization the SoCBati at distributed as is shown in Bati ESS SoC should supplyhand, morewhen power toESS the 00 C Bati units are being charged, the ESS with the smallest SoC should an equalization of the SoC at distributed ESS as is shown in units are When being theOn ESSthe with thecoefficient smallest SoCthe should Fig. 3. microgrid than charged, thethe others. other hand, when ESS s (RES+ESS)). same droop where SoC(0) SoC(0)Bati the initial SoC, C is the capacity Bati is Bati get more more energy energy from from the the microgrid microgrid than than the the others. others. This This where is the initial SoC, C is the capacity Bati get Fig. 3. units are being charged, the ESS is with the smallest SoC should pplied to each ESS the power shared in (A/h), (A/h), is SoC the charging/discharging efficiency, and First ofηηall, each ESS is estimated by ampereBatithe behavior canunit, be achieved achieved by weighting weighting the equally droop coefficient coefficient in is the at charging/discharging efficiency, and Bati behavior can be by the droop get more energy from the microgrid than the others. This IBati(τ (τ )) is iscounting the instantaneous instantaneous current at each battery array [8]. hour (Ah) method (m ) by a factor α as is shown in Fig. 2b and Fig. 2c for ESS units behavior as we can see in Fig. 2a. 0 i I the current at each battery array [8].ampereBatiof all, the SoC at each ESS is estimated by (m00) by can a factor αii as is by shown in Fig.the2bdroop and Fig. 2c for First be achieved weighting coefficient By considering considering aa constant constant current the power at each discharge and and charge charge of of ESS ESS units units respectively. respectively. In In the the case case of of Z charge, By current charge, the power at each discharge ∆t (m by and a factor α as isassumed shown inthat Fig. 2b and >Fig. 2c for hour (Ah) method 0 ) 2b i it IBati (τ ) batterycounting array can can be approximated as Fig. Fig. 2c 2c SoC SoC Bat2 > Bat1.. battery array approximated r the discharge for balancing the SoC, the SoC(∆t) SoC(0) dτ (4) Fig. 2b process, and Fig. itofisis assumed that SoC SoC Bat2 Bati = be Bati − as ηBati Bat2 Bat1 discharge and charge ESS units respectively. In the case of CBati In the figures, it is possible to see that for the charging process Δt 0 In the figures, it is possible to see that for the charging process ≈ V ∗ I P h the highest SoC should supply more power to the Bati Bati Fig. 2b |and 2c On it istheassumed SoCdischarging IBati (τ (5) )(5) Bat2 > SoC Bat1 . PBati Bati ≈ V Bati ∗ I Bati |PBat1 >|P |PFig. contrary,that for the the process Bat2|.|.On |P | > the contrary, for discharging process SoC(Δt) = SoC(0) − η dτ (4) Bat1 Bat2 Bat1 Bat2 Bati Bati Bati In the figures, it is possible to see that for the charging process where SoC(0) is the initial SoC, C is the capacity Bati Bati d than the others. On the other hand, when the ESS where (V |P | > |P |, this characteristic has to be taken into ) is the nominal voltage of the battery array. Bat2 > |P Bat1|, this characteristic has to be taken into Bati ) is the nominal voltage of the battery CBati where (VBati |PBat1 array. 0 Bat2|| > Bat1 Bat2 Bat1 |P |P |. On the contrary, for the discharging process in (A/h), η is the charging/discharging efficiency, and Bat2 Bati account when thewith weighting factors ααi are Despite this this approximation is accurate, itit provide us are determined. get being charged, the ESS the smallest SoC should To get account when the weighting factors is not not at accurate, provide us ii hasdetermined. |P to be takenTointo IDespite (τ ) is theapproximation instantaneous current eachCbattery array [8]. Bat2 | > |PBat1 |, this characteristic Bati where SoC(0) is the initial SoC, is the capacity Bati Bati energy from the microgrid than the others. This in (A/h), ηBati is the charging/discharging efficiency, and can be achieved by weighting the droop coefficient I Bati (τ ) is the instantaneous current at each battery array [8]. a factor αi as is shown in Fig. 2b and Fig. 2c for By considering a constant current charge, the power at each and charge of ESS units respectively. In the case of By considering a constant current charge, the power at each battery array can be approximated as Obtain External Data (5) PBati ≈ VBati ∗ IBati where (VBati ) is the nominal voltage of the battery array. Despite this approximation is not accurate, it provides us enough information about the battery capacity at every ESS. Then, from (4) and (5), it is possible to obtain ∆SoCBati VBati CBati PBati ≈ − ≈ −mSoCi KBati (6) ∆t ηBati (Power and SoC) Solve X A1 B No Charge If where, mSoCi is the rate of the SoC, and KBati is a proportionality constant that depends on the main parameters of the ESS. In a general case, where n distributed active generators (RES+ESS) are integrated into the microgrid, it is easy to derive the power balance equation as: n X i=1 PBati + n X i=1 i=1 (7) PRESi − Pload = 0 −mSoCi KBati + n X i=1 PRESi − Pload = 0 (8) SoC(0)Bati + mSoCi ∆t = SoC(0)Bat(i+1) + mSoC(i+1) ∆t Reorganizing the equation system formed by expressions (8) and (9), we can derive the following symbolic matrix representation as (10) [A][X] = [B] and If e = 1 & v = i; If e = i + 1 & v = i; If e = i + 1 & v = i + 1; Otherwise . (11) is the entry in the e-th row and v-th column of A. T (12) [X] = [mSoC1 , mSoC2 , · · · , mSoCn ] [B] = Discharge If SoC (0) Bat1 SoC (0) Bat 2 Yes No 1 K min K max 2 1 K Bat1mSoC1 K Bat 2 mSoC 2 Wait until Time t No Yes Pn −( i=1 PRESi − Pload ) (SoC(0)Bat2 − SoC(0)Bat1 ) .. . (SoC(0)Batn − SoC(0)Batn−1 ) (13) Consequently, the adequate values for each mSoCi that ensure the equalization of the SoC within a defined period of time (∆t) can be obtained as [X] = [A]−1 × [B] 1 2 K Bat 2 mSoC 2 K Bat1mSoC1 END When an equalization of the SoC is required within a defined period (∆t), SoC(∆t)Bat(i−1) = SoC(∆t)Bati = SoC(∆t)Bat(i+1) . Because of this, the straight-line equation of a particular i-th ESS unit can be equalized with the straightline equation of other i-th ESS unit as where, [A] = (ae,v )nxn −KBati , ∆t, ae,v = −∆t, 0, SoC (0) Bat1 SoC (0) Bat 2 Yes 2 K min K max where Pload is the load consumption, and PRESi is the power supplied for each RES. Combining (6) and (7), we have: n X If Pbat>0 (14) Fig. 4: Equalization algorithm diagram. The main task of the equalization algorithm is to solve the equation (14), in order to obtain the values of mSoCi . Once the value for each mSoCi is calculated, the weighting factor αi in (2) is obtained for each ESS droop control loop in accordance to: α1 · PBat1 = α2 · PBat2 = αi · PBati (15) Then, the next step in the algorithm is to identify if the ESS’s are being charged or discharged. Afterwards, it (9) is necessary to identify which ESS has the biggest value of SoC. The idea is to weight the nominal droop factor m0 in accordance to the SoC and battery array capacity. To be more precise, during the operation of the algorithm, when the ESS units are being charged, the largest weight is assigned to the ESS unit with the biggest value of SoC. This maximum weight is defined by (Kmin /Kmax ), where Kmin and Kmax are the minimum and maximum values of the proportionality constant defined in (6). In this way, it is ensured that the droop coefficient (α·m0 ) will never be bigger than its nominal value, what avoids under-damped behaviors in the response of the microgrid [22]. On the contrary, for the process of discharging the ESS’s, the largest value of the weighting factor will be assigned to the ESS unit with the lowest SoC. To illustrate, the algorithm for two active generators based microgrid (n = 2) is summarized in Fig. 4, where the initial step of the centralized algorithm is to obtain the external data from the distributed units. Since the proposed algorithm is based on simple matrix operation, the computational time is very small (around 0.15s). This time can be negligible compared with the time scale required for charging batteries (normally hours). Apart from that, since the equalization is only defined during a specified period, it is required to define how the weighting factor will be established during periods of no equalization. In this case, a similar charge/discharge rate is expected for each i-th ESS, this is (mSoCi−1 = mSoCi = mSoCi+1 ). AC Bus EMS AC Bus AC/AC Converter y EMS MPPT IWT V WT Vbat RES Primary Control Battery Array I PV VPV IL IL rot IL DC/AC Bidirectional Battery Array Converter AC Bus DC/AC Bidirectional Converter xRES 1 xESS 1 ESS Primary Control AC Bus AC Bus IL xLOAD IL DC/AC Converter Load I bat Vbat ESS Primary Control xESS 2 PLL I bat VPV PLL PV Array abc dq PLL PLL abc dq Current Control Loop abc dq abc dq I* + PI - P* Q* VCdq xESSi PRESi Power Calculation I PV CCM Current Reference Generator PLL I Ldq VCdq PLL PWM Encoder RES Primary Control xRES 2 Communication channel WT PV Array DC/AC Converter Communication Channel RES Primary Control Fig. 5: Diagram of the AC islanded microgrid with centralized EMS. Fig. 6: Control diagram for RES. DC/AC Bidirectional Converter Battery Array AC Bus IL Kmin αi = KBati (16) I bat Communication channel This is also the behavior expected once the SoC’s have been equalized. Regarding differences at the ESS’s capacities, the largest value of the weighting factor (αi = 1) will be assigned to the ESS with the smallest capacity. Meanwhile, the others ESS units will get a weighting factor in accordance to: xESSi SoC Encoder i Decoder SoC Estimator K Bati - * + + E - E* Voltage Reference Generator Vdq* + - ref Kq m0 Droop Coefficients IV. O PERATION OF THE M ICROGRID The data sent from each RES unit (XRESi ), each ESS unit (XESSi ), and the load (XLOAD ) are set as (17) T XESSi = [KBati , SoCBati ] XLOAD = [Pload ] I Ldq ref Q ref abc dq VCdq Power Calculation P ESS Primary Control Meanwhile, the ESS operate in voltage control mode (VCM) being responsible of regulating the bus voltage. At this mode, the batteries will be charged or discharged in order to compensate the unbalance between the energy generated by RES and load consumption [19], [13]. The power unbalance is shared between ESS by means of conventional droop control loop adjusted by the weighting factor αi in order to achieve SoC equalization. In this case, a typical double-loop VCM controller is implemented for a bidirectional inverter, as can be seen in Fig. 7. The reactive power flow Q is equally shared between distributed ESS in accordance to conventional Q − E droop control loops as (18) (19) The data sent from the EMS to each RES unit YEM S , is just the weighting factor (αi ) YEM S = [αi ] VCM ref abc dq Fig. 7: Control diagram for ESS. The general scheme of the microgrid considered for this study is composed by two RES generators (a photovoltaic (PV) generator and a wind turbine (WT) generator), two ESS units based on batteries, a critical load, a centralized EMS for performing the equalization algorithm and a dedicated full-duplex communication channel as can be seen in Fig. 5. User Datagram Protocol (UDP) is used for interchanging data between each distributed energy unit and the EMS. XRESi = [PRESi ] Current PWM Control Loop abc PI dq - I* + PI (20) As aforementioned, in islanded operation for charging/discharging process of the ESS units, the RES units assume the role of grid-following units operating under (CCM) inner loop that follows maximum power point tracking (MPPT) algorithm. MPPT strategies are out of the scope of this paper, interested readers may also refer to [23] and [24]. To get back to the point, the inductor current of the converter is controlled by typical inner current loops. Fig. 6 shows the scheme of the inner current control for a RES based on PV generator. In general, the control scheme for a RES based on WT is the same as shown in Fig. 6 taking into account differences at the power converter and MPPT method [24]. E = E ∗ − Kq · Q (21) where, E is the voltage amplitude of the inverter, Q is the reactive power at the respective unit, E ∗ is the voltage reference and Kq is the droop coefficient [25]. The microgrid has been designed to supply a nominal resistive load in a balanced three phase system. An aggregated model based on a detailed model of a VRLA battery array, proposed in [7] has been used for simulating the batteries. Table I summarizes the main parameters of the microgrid. V. R ESULTS AND D ISCUSSION A MATLAB/Simulink model of the ac microgrid has been used in order to test the operation of the equalization algorithm. The microgrid is composed by a PV, a WT, the communication channel and their corresponding ESS as is shown in Fig. 5. Three main cases have been considered for the evaluation of the equalization algorithm. Those are, CBat1 = CBat2 , CBat2 > CBat1 , and CBat2 < CBat1 . All the cases were TABLE I: Main Parameters of the Microgrid Value 2 ∗ π ∗ 50 √(rad/sec) 230 ∗ 2 (V) 1600 (W ) 2200 (W) 672 (V) 93% 0.02 (Ah) 5 (sec) 1.25 ∗ 10−5 (rad)/(sec)/(W) 5 ∗ 10−4 V/(VAr)) 0 (VAr) implemented by considering a total generation from RES of PRES1 + PRES2 = 3000W and PRES1 + PRES2 = 0W for charging and discharging respectively. Particularly, small values of capacity (Cmax = 0.02Ah) have been selected in order to speed up the simulation time. For simulation purpose, the equalization will be activated at 5 and 15 s for a period ∆t = 5s. Therefore, we can also see the behavior of the system during periods of no equalization. In general the time for running the equalization can be adjusted in accordance to the requirements of the EMS. (%) (%) Parameter Nominal Bus Frequency (ω ∗ ) Nominal Bus Voltage (E ∗ ) Nominal Load Maximum (RES) Power Rating Nominal Battery Voltage (VBat ) Charging/discharging efficiency (ηBati ) Nominal Battery Capacity (CBat ) Period of the Equalization Algorithm (∆t) Nominal Droop Coefficient (m0 ) (Q − E) Droop Coefficient (Kq ) Reactive power Reference (Q∗ ) (a) (b) Fig. 8: Case CBat1 = CBat2 : (a) Charge (b) Discharge. Dif f (SoC) = SoCBat2 − SoCBat1 (22) where, it is possible to see that the difference is practically zero after two iterations. Similarly, Fig. 8b shows the response of the microgrid when the ESS’s are being discharged. In this case, an initial SoC of 85% and 95% have been established for ESS1 and ESS2 respectively. Comparing Fig. 8a and Fig. 8b during the equalization, we can see that for the discharging process |PBat2 | > |PBat1 |. Meanwhile, for the charging process |PBat1 | > |PBat2 |. We can also see in Figs. 8a and 8b that the power is equally shared during periods of no equalization (10s to 15s) and (20s to 25s), since both ESS have the same capacity. B. Case CBat2 > CBat1 Fig. 9a and 9b show the response of the microgrid when CBat1 = 0.01(A/h). Similar initial conditions to the previous case have been established. We can see that when the equalization is not applied (10s to 15s, and 20s to 25s), we have |PBat2 | > |PBat1 |. The reason of this is that ESS2 requires much more power in order to achieve mSoC1 = mSoC2 . However, when the algorithm is applied, the current is adjusted in order to equalize the SoC’s. (%) Fig. 8a shows the performance of the equalization algorithm when the ESS’s are being charged. An initial SoC of 55% and 65% have been established for ESS1 and ESS2 respectively. Fig. 8a shows the equalization process for SoCBat1 and SoCBat2 , the active power at each ESS unit where we can see how the power is shared and adjusted during the equalization in order to achieve the objective. At the end, Fig. 8a shows the difference between SoC (%) A. Case CBat1 = CBat2 (a) (b) Fig. 9: Case CBat1 < CBat2 : (a) Charge (b) Discharge. C. Case CBat2 < CBat1 Fig. 10a and 10b show the response of the microgrid when CBat2 = 0.01(A/h). Compared to the previous case, |PBat2 | < |PBat1 |, when the equalization is not applied. We can see how the difference is reduced when the algorithm is applied. Nevertheless, they are required two iterations of the equalization algorithm in order to reach Dif f = 0, this is because the transitory and dynamic response have not been considered by the algorithm. Apart from that, the approximation in (5) can lead to small errors in the equalization process. Nevertheless, the proposed approach has proved to be faster and more accurate for the equalization of the SoC compared to other approaches such in [4], [17]–[19]. Additionally, for the proposed approach, we have considered differences at the capacities of the distributed ESS’s, and the equalization is ensured despite the differences. Moreover, one of the main advantages of the proposed method is that it is based on simple algebraic operations what makes its processing time very small (less than 160 ms). VI. C ONCLUSION The proposed strategy has demonstrated to be effective for SoC equalization in distributed ESS’s. Despite, they were [9] [10] [11] (%) (%) [12] [13] (b) (a) [14] Fig. 10: Case CBat1 > CBat2 : (a) Charge (b) Discharge. established several approximations for defining the model and transitory response is not considered by the algorithm (linear behavior is assumed), the algorithm is able to equalize the SoC within few iterations. This algorithm can be complemented by an optimization process in order to minimize the period of time ∆t, and more accurate models can be evaluated. Additionally, power constraints should be taken into account for the optimization by considering the maximum power ratings of the ESS’s. On the other hand, for a complete operation of the islanded microgrid, it is necessary to consider a adequate architecture for the operation of the microgrid which considers changes at the operation mode of batteries or curtailment of RES’s generation when batteries are fully charged. As well as consider load shedding strategies for avoid deep discharge of batteries. R EFERENCES [1] [2] [3] [4] [5] [6] [7] [8] J. Vasquez, J. Guerrero, J. Miret, M. Castilla, and L. de Vicua, “Hierarchical control of intelligent microgrids,” IEEE Industrial Electronics Magazine, vol. 4, pp. 23–29, Dec 2010. J. de Matos, F. e Silva, and L. Ribeiro, “Power control in ac isolated microgrids with renewable energy sources and energy storage systems,” IEEE Transactions on Industrial Electronics,, vol. 62, no. 6, pp. 3490– 3498, 2015. H. Kanchev, D. Lu, F. Colas, V. Lazarov, and B. Francois, “Energy management and operational planning of a microgrid with a pv-based active generator for smart grid applications,” IEEE Transactions on Industrial Electronics, vol. 58, pp. 4583–4592, Oct 2011. H. Beltran, E. Bilbao, E. Belenguer, I. Etxeberria-Otadui, and P. Rodriguez, “Evaluation of storage energy requirements for constant production in pv power plants,” IEEE Transactions on Industrial Electronics, vol. 60, pp. 1225–1234, March 2013. M.-S. Lu, C.-L. Chang, W.-J. Lee, and L. Wang, “Combining the wind power generation system with energy storage equipment,” IEEE Transactions on Industry Applications, vol. 45, pp. 2109–2115, Nov 2009. H. Kakigano, Y. Miura, and T. Ise, “Distribution voltage control for dc microgrids using fuzzy control and gain-scheduling technique,” IEEE Transactions on Power Electronics, vol. 28, pp. 2246–2258, May 2013. T. Dragicevic, J. Guerrero, J. Vasquez, and D. Skrlec, “Supervisory control of an adaptive-droop regulated dc microgrid with battery management capability,” IEEE Transactions on Power Electronics, vol. 29, pp. 695–706, Feb 2014. I. S. C. C. 21, “Guide for optimizing the performance and life of leadacid batteries in remote hybrid power systems,” IEEE Std 1561-2007, pp. C1–25, 2008. [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] D. Linden and T. Reddy, Handbook of batteries. McGraw-Hill handbooks, McGraw-Hill, 2002. Y.-K. Chen, Y.-C. Wu, C.-C. Song, and Y.-S. Chen, “Design and implementation of energy management system with fuzzy control for dc microgrid systems,” IEEE Transactions on Power Electronics, vol. 28, pp. 1563–1570, April 2013. J. Guerrero, J. Vasquez, J. Matas, M. Castilla, and L. de Vicuna, “Control strategy for flexible microgrid based on parallel line-interactive ups systems,” IEEE Transactions on Industrial Electronics, vol. 56, no. 3, pp. 726–736, 2009. J. Guerrero, J. Vasquez, J. Matas, L. de Vicua, and M. Castilla, “Hierarchical control of droop-controlled ac and dc microgrids a general approach toward standardization,” IEEE Transactions on Industrial Electronics, vol. 58, no. 1, pp. 158–172, 2011. Y. Zhang, H. J. Jia, and L. Guo, “Energy management strategy of islanded microgrid based on power flow control,” in 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), pp. 1–8, 2012. X. Lu, K. Sun, J. Guerrero, J. Vasquez, L. Huang, and R. Teodorescu, “Soc-based droop method for distributed energy storage in dc microgrid applications,” in 2012 IEEE International Symposium on Industrial Electronics (ISIE), pp. 1640–1645, 2012. C. Li, T. Dragicevic, N. Diaz, J. Vasquez, and J. Guerrero, “Voltage scheduling droop control for state-of-charge balance of distributed energy storage in dc microgrids,” in Energy Conference (ENERGYCON), 2014 IEEE International, pp. 1310–1314, May 2014. C. Li, T. Dragicevic, M. Garcia Plaza, F. Andrade, J. Vasquez, and J. Guerrero, “Multiagent based distributed control for state-of-charge balance of distributed energy storage in dc microgrids,” in 40th Annual Conference of the IEEE Industrial Electronics Society, (IECON), pp. 2180–2184, Oct 2014. X. Lu, K. Sun, J. Guerrero, J. Vasquez, and L. Huang, “State-of-charge balance using adaptive droop control for distributed energy storage systems in dc microgrid applications,” IEEE Transactions on Industrial Electronics, vol. 61, pp. 2804–2815, June 2014. Q. Shafiee, T. Dragicevic, J. Vasquez, and J. Guerrero, “Hierarchical control for multiple dc-microgrids clusters,” IEEE Transactions on Energy Conversion, vol. 29, pp. 922–933, Dec 2014. N. Diaz, T. Dragicevic, J. Vasquez, and J. Guerrero, “Intelligent distributed generation and storage units for dc microgrids - a new concept on cooperative control without communications beyond droop control,” IEEE Transactions on Smart Grid, vol. 5, pp. 2476–2485, Sept 2014. D. Wu, F. Tang, T. Dragicevic, J. Vasquez, and J. Guerrero, “Autonomous active power control for islanded ac microgrids with photovoltaic generation and energy storage system,” IEEE Transactions on Energy Conversion, vol. 29, pp. 882–892, Dec 2014. T. Vandoorn, J. Vasquez, J. De Kooning, J. Guerrero, and L. Vandevelde, “Microgrids: Hierarchical control and an overview of the control and reserve management strategies,” IEEE Industrial Electronics Magazine, vol. 7, pp. 42–55, Dec 2013. E. Coelho, P. Cortizo, and P. Garcia, “Small-signal stability for parallelconnected inverters in stand-alone ac supply systems,” IEEE Transactions on Industry Applications, vol. 38, pp. 533–542, Mar 2002. V. Salas, E. Olı́as, A. Barrado, and A. Lázaro, “Review of the maximum power point tracking algorithms for stand-alone photovoltaic systems,” Solar Energy Materials and Solar Cells, vol. 90, no. 11, pp. 1555 – 1578, 2006. C. Patsios, A. Chaniotis, M. Rotas, and A. Kladas, “A comparison of maximum-power-point tracking control techniques for low-power variable-speed wind generators,” in 8th International Symposium on Advanced Electromechanical Motion Systems Electric Drives Joint Symposium, 2009. ELECTROMOTION 2009, pp. 1–6, July 2009. J. Guerrero, L. Garcia De Vicuna, J. Matas, M. Castilla, and J. Miret, “A wireless controller to enhance dynamic performance of parallel inverters in distributed generation systems,” IEEE Transactions on Power Electronics, vol. 19, pp. 1205–1213, Sept 2004.