Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
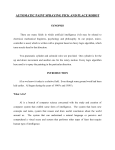
CHAPTER 2 TYPES OF CONTROLLER BY: Salsabila Ahmad DIGITAL LOGIC CONTROLLER INTRODUCTION Lowest level controller Not flexible Many limitations Digital Signals have two basic states: 1 (logic “high”, or H, or “on”) 0 (logic “low”, or L, or “off”) Digital values are in a binary format. Binary means 2 states. A good example of binary is a light (only on or off) Need 2 inputs to produce 4 states BINARY AS A VOLTAGE Voltages are used to represent logic values: A voltage present (called Vcc or Vdd) = 1 Zero Volts or ground (called gnd or Vss) =0 Basic Digital logic is based on 3 primary functions (the basic gates): AND, where all inputs must be high for a high output OR, where any input must be high for an output high NOT, where the output is the opposite (compliment) of the input FUZZY LOGIC CONTROLLER WHAT IS FUZZY LOGIC? is a control method that attempts to make decisions as a human being would It attempts to mimic human decisions making (not only uses fixed mathematical formula, but can weight each rule as to its importance). A logic based on the two truth values True and False is sometimes inadequate when describing human reasoning Fuzzy logic uses the whole interval between 0 (False) and 1 (True) to describe human reasoning As a result, fuzzy logic is being applied in rule based automatic controllers EXAMPLE IN TODAY’S APPLICATION Video recorders with fuzzy logic can differentiate wanted movement of the camera from unwanted movement thus stabilize the picture. Many industrial applications are appropriate for fuzzy logic AS FOR EXAMPLE: A fuzzy controller, in a cement plant for example, aims to mimic the operator’s terms by means of fuzzy logic. To illustrate, consider the tank in Fig. 1 which is for feeding a cement mill such that the feed flow is more or less constant. Figure consists of a tank two level sensors a magnetic valve. The objective to control the valve VL i.e. refilled when the level is as low as LL stop the refilling when the level is as high as LH Note: VL=1 (valve open) VL=0 (valve close) LL=1 (level above mark) LL=0 (level below mark) LH=1 (level above mark) LH=0 (level below mark) An operator responsible to open and close the valve would describe the control strategy as: if the level is LOW then open VL if the level is HIGH then close VL (1) But in Boolean/Digital logic controller, it can be described as: if LL switches from1 to 0 Then VL=1 if LH switches from 0 to 1 Then VL=0 (2) PROGRAMMABLE LOGIC CONTROLLER INTRODUCTION TO PLC user friendly electronic computer used to control functions of many types and levels of complexity. A substitution for hardwired relay which is not economical Not reliable Hard to rewire when to be modified Easy to understood by plant engineers and maintenance electricians/technicians for its simple relay logic and ladder diagrams THE PLC SYSTEM Programming device Memory Input interface Processor Power supply Output interface MAJOR PARTS OF PLC 1. 2. A CPU (processor) = serves as the “brain” of the system A programmer/monitor unit = enter PLC programs to be stored in CPU = to monitor the status of the running system The input/output (I/O) modules = sends signals to devices being controlled = receives signals from the sensors on the factory floor