Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
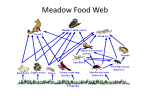
Ecosystem Modeling Workshop Co-Sponsored by CaRA, GCOOS, GOMA, & SECOORA October 14-16, 2009, St. Petersburg, FL A History and Evolution of Ecosystems Models Claire B. Paris Assistant Professor Rosenstiel School of Marine & Atmospheric Science University of Miami Nasseer Idrisi Assistant Professor, CaRA Subregional Coordinator US Virgin Islands Center for Marine and Environmental Studies University of The Virgin Islands Outline 1. 2. 3. 4. 5. what is an ecosystem model how are they developed where we were where we are where we want to be 1. what is an ecosystem model? Definition: A simplified representation of complex ecosystems (e.g. foodweb), aimed at characterizing their major dynamics and predicting their behavior - forced from the outside at the boundaries with input from data or other models - interact dynamically through coupling with physical models Forcing: -Temperature -Interacting chemicals -Currents -PAR -etc…. P N Z D 2. how are ecosystem models developed? • Holistic or reductionist approaches (bottomup, POM) • Predictive approach (hypothesis in terms of expected results) • Inferential, deduct mechanism (hypothesis in terms of processes) • Mechanistic or empirical methods deductive reasoning • hypothesis generating (experimental modeling) Each has its own strengths and weaknesses. The development of a model, the type of model, the approach and method used, and the final analysis and synthesis should be suited to the study (e.g., start with a specific question, what observed patterns characterize the system dynamic, Grim 2005) 3. Where we were Raymond Pearl (1920s): described population growth through mathematical representation using the logistic equation (Verhulst: 1845, 1847)) to forecast human population growth. Pearl also laid the foundations for developing empirically-derived models of demography that include information on fecundity and birth rates, death rates, immigration and emigration that statistically describe the dynamics of a population. dN = dt rN(K-N) K r and K are specific to a species and environment conditions, but can change depending on species and conditions 3. Where we were Alfred Lotka (1924) and Vito Volterra (1926) independently developed a system of coupled ordinary differential equations that describe predator-prey interactions over time. These are exponential in nature and the populations at different trophic levels are constrained by their coupled nature. The competitive model system, also attributed to Lotka and Volterra describe the interactions between two species through coupled logistic equations where each population is constrained by the other and a carrying capacity term in each where x and y are prey and predator, α, is the prey’s growth rate β, is an interaction parameter (predation of Y on X) γ, the assimilation efficiency of Y δ is the mortality rate of the predator 3. Where we were: NPZ 3 compartments system The next major step in ecosystem modeling came with Gordon Riley (1946) with a 3-level system of coupled ordinary differential equations that describes a planktonic marine ecosystem. These models increased in sophistication with John Steele (1974) and Steele and Frost (1977) that accommodate better means for parameterization, and more robust with regards to assumptions and constraints. Franks and Chen (1996) coupled a Nutrient-Phytoplankton-Zooplankton (NPZ) model into a primitive equation model and applied it to examine the summertime plankton dynamics on GB. That was the first modeling effort to study the biological process under the “realistic” physical environment in the GoM/GB region. From Francisco Werner’s 1999 tutorial at UNC 3. Where we were NPZ 3 compartments system Franks and Chen (2000) carried out numerical experiments for 2-D and 3-D cases on Georges Bank: The 2-D experiments were conducted on a south-north transect across the center of GB. The model is driven by tidal forcing only with an assumption that the cross-bank distribution of temperature, phytoplankton and nutrients on GB is mainly related closely to the tidal mixing front. The 3-D experiments were conducted with emphasis on the role of tidal mixing and advection in the spatial and temporal distributions of temperature, phytoplankton, zooplankton, and nutrients on GB. Similar to the 2-D case, the initial fields of temperature and biological variables are specified to be uniform in the horizontal with assumption that the spatial and temporal variations of physical and biological variables are caused by tidal mixing and advection. The model-predicted distribution of tidal mixing front is in excellent agreement with previous observations. 3. Where we were Model formulations and assumptions: Up to this point, it is understood that the models used to represent ecosystems require many assumptions regarding the model boundaries and how these systems are forced and the nature of the behavior of the modeled components to forcing from outside the system and from within the system. How do we constrain a model variable and how do we constrain the variable’s behavior? These are important questions that need to be asked when developing the model system for a particular study. 3. Where we were Population modeling: At the base of ecosystem models is the population, and throughout the 20th century, population model development evolved with the Leslie Matrix Model (P.H. Leslie, 1945) that uses demographics, information that Pearl used to describe human populations. Beverton and Holt (1957) developed models for fisheries to hindcast fish cohorts to understand fish population growth, and this evolved into Virtual Population and Multispecies Virtual Population Analysis that are used for fisheries management. Food web modeling: The following step was to extend to food web modeling (Robert May, Joel Cohen, Robert Ulanowicz, Neo Martinez, and many more) with increased complexity with regards to populations and communities within ecosystems. Individual-Based Models: Other than food webs, population models also became more sophisticated with the increase in computer power. This advancement in computational power has led to the development of individual-based and agent-based models (IBMs) of populations and communities. From Francisco Werner’s 1999 tutorial at UNC spatially-explicit Lagrangian models 4. Where we are now: Biophysical coupled ecosystem models (e.g., P. Franks, C. Miller) include what are termed NPZ/NPZD ecosystem models that simulate interactions among pelagic state variables of nutrients, phytoplankton, zooplankton and detritus in the Eulerian field. These Eulerian models are coupled to IBMs that are modeled as Lagrangian particles. It has been argued that advances in coupled NPZ models have not moved forward as much as they should (Franks, in press), the reason has been attributed to a fact that many of these studies are not hypothesis-driven, or if they are, the study design does not allow for the rejection of the main hypothesis in favor of an alternative hypothesis. Rather, model parameters are tweaked endlessly until the model output fits the data and the desired outcome is achieved. 5. Where we are now 3D OGCM-7 compartments NP Tsiaras and Kourafalou (2006)explored the main physical and biological processes that control the seasonal cycle of the plankton dynamics over the Western Black Sea by means of a 3-D, 7-compartment, on-line coupled biophysical model - high frequency forcing indicated that seasonal production was linked to the Danube river’s discharge. 4. Where we are now Coupled physical-biological Lagrangian particle models have followed a more productive path than NPZ models as evidenced by the nature and quality of publications produced over the past several years. coupling NPZD with spatially-explicit Lagrangian models Idrisi et al. (2004) use the physiologicallyexplicit NPZD model and a simple behavior for the Lagrangian model that is also physiologically constrained to simulate emergence from diapause of an Arabian Sea copepod species.2.71% of individuals were physically upwelled into favorable conditions and 23.4% of individuals swam into bloom conditions. 5. Where we are now Olascoaga et al. (2005) coupled an NPZD to MICOM for the Arabian Sea using a growth function that is temperature dependent and parameterized from JGOFS data from the 1995-1996 Arabian Sea Expedition Physiologically-explicit temperature-dependent growth can be global and applicable across latitudes Coupling to ocean circulation: Coupling an NPZD to ocean circulation 4. Where we are now: static ecological model Ecopath, a static mass-balance system, ecosim – time-dynamic simulation, and ecospace – spatially explicit simulation (Christensen and Walters). Ecopath introduces prey behavior with the predator-prey transfer functions of a Holling type II or III equation. The system has been criticized such as – that the general predictions on predator declines can be understood from basic life-history information, and that all energy is cycled within the system and the species diet is inflexible. The authors of ecopath make valid counterarguments, but it is yet to be seen as to the success of this system. 3 Components: ▪ Ecopath – a static, mass-balanced snapshot of the system ▪ Ecosim – a time dynamic simulation module for policy exploration ▪ Ecospace – a spatial and temporal dynamic module primarily designed for exploring impact and placement of protected areas 5. Where we want to be The path forward is to reflect on the past – triumphs and failures, evaluate past mistakes and apply corrective measures. An ecosystem model should be treated as an hypothesis, and should be rejected if the results do not represent the phenomenon being tested. How then will we know if, given a certain scenario, a Michaelis-Menton function is adequate to represent phytoplankton growth, or do we need a temperaturedependent growth function, or PAR absorption function, or maybe something else? Good models use experiments and field data to develop parameters, modeling studies need to work hand in hand with laboratory/field experiments and field data collection, and to take advantage of advances in assimilation techniques. These advances are necessary, especially in the context of this workshop for IOOS, whose mission is to develop operational models for use by managers, policy makers, and other product users. We cannot provide an operational ecosystem model if we cannot get the science of the ecosystem Field observations & model correct. Lab experiments Data Assimilation 5. Where we want to be deYound, Heath, Werner, Chai, Megrey, Monfray (2004 Science) Relationship between trophic level and functional complexity within marine ecosystem models. The rhomboids indicate the conceptual characteristics for models with different species and differing areas of primary focus. Key Modeling Aspects & Challenges • physical model in which the biological representation is embedded should have appropriate resolution & complexity • modeling with uncertainties: probabilistic vs deterministic simulations (endemic lack of knowledge of processes & structures at those scales), i.e. ensemble forecast, iterative stochastic approach - less precise but more accurate! • The response of marine food webs to environmental changes cannot be based on the predictions of static models whose parameters are chosen based on the goodness of fit of model output to currently observed phenomena. The reason is that communities of organisms are adaptive. In order to understand how biological communities adapt, it is first necessary to understand the principles that drive the organization of those communities. 5. Where we want to be The European Regional Seas Ecosystem Model (ERSEM, Baretta et al., 1995) consists of five modules (conceptual units): Primary producer module; Microbial loop module; Mesozooplankton module; Benthic nutrients module and Benthic biology module. 5. Where we want to be Chen (UMass) and Beardsley (WHOI), have developed an integrated model system for the Gulf of Maine (GoM)/Georges Bank (GB)/New England shelf (NES) region. The major components of this system include: 1) the modified fifth-generation community mesoscale atmospheric model (MM5); 2) the unstructured grid Finite-Volume Coastal Ocean circulation Model (FVCOM); 3) a 3-D suspended sediment transport model; 4) a generalized lower trophic level food web model [called Flexible Biological Module (FBM)], 5) a multi-stage zooplankton models (developed by Cabell Davis at WHOI). 4. Where we want to be: Multi-scale modeling Srinivasan and Paris (RSMAS) have developed a coupled physical-biological IBM, the Connectivity Modeling System (CMS) with particle swimming behavior and trophic levels interactions (NPZ), featuring 1) on-the-fly access of ocean model data using OPeNDAP, 2) the Earth Modeling System Framework (EMSF) that channels multi-scale data from model and observation, 3) statistical interpolation of observations, 4) Lagrangian and Eulerian data assimilation, 5) nesting capabilities, 6) a flexible biological module, a 7) a GIS-based habitat module, and 8) a genetic matrix-based module. Partners providing high-resolution ocean models for the CMS are Kourafalou (SoFL-HYCOM, FLKey-HYCOM) and Cherubin (ROMS). 1. Raymond Pearl human population growth models (logistic). Summary 2. Lotka-Volterra predator-prey and competition models. 3. Wiegert predator-prey models. 4. Leslie matrix population models. 5. Virtual Population Analysis of commercially important fish populations. 6. Multi-virtual population analysis of commercially important fish communities. 7. Nutrient-phytoplankton-zooplankton-detritus numerical difference models. 8. Food web models: networks, links, and energy flows. 9. Individual-based models. 10. Agent-based models. 11. Ecopath. 12. Coupled biophysical NPZD and higher complexity models in the Eulerian field. 13. Coupled biophysical individual-based models in the Lagrangian field. The first three models (1-3) are either individual or a set of coupled differential equations. Models 4-9 and 12-13 are individual or sets of coupled linear difference equations. Models 12 and 13 are coupled to a physical model and be spatially explicit, rather than being a ‘box’ model as earlier models were, and the earlier models considered space implicitly. Models 10 and 11 are Discussion What type of ecosystem models we want for the region? Objectives of Ecosystem Modeling for CaRA, GCOOS, GOMA, & SECOORA: -Identify existing weaknesses, theoretical constraints, and needed advances in ecosystem modeling -what are the issues/problems that ecosystem models are expected to address? -review ecosystem modeling activities underway in the Gulf of Mexico, Caribbean Sea, and southeastern U.S. coastal waters, including estuaries and bays -Unified, coordinated program of ecosystem modeling for the region Ecosystem Modeling Workshop 14-16 October 2009 St. Petersburg, FL 5. Where we want to be Conceptual Model: hypothesis testing From Idrisi et al. (2001) Impact of an invasive grazer on pelagic lower food web (N-P-Z). Factors Zebra mussel invasion=> Phosph Phyto Zoopl Hypothesized InorganicP ParticulateP Reality Biomass Production Biomass Production Contrary to the hypothesized decrease in primary production, increase in water clarity led to the system maintaining constant productivity levels that led to an increase in Lagrangian particle tracking algorithm Adlandsvik et al. (WAKMF 2006) Advantages with particle tracking • Good numerical properties: Avoids numerical diffusion and dispersion Permit longer time steps and offline tracking • Individual based (IBM): Physical basis for individual based biological models • Relatively easy to implement Scientific status for particle tracking • • • • Theoretical basis known for at least 20 years Good algorithms are available Some details regarding vertical boundary conditions are not understood (Ross and Sharples 2004) Turbulence parameterization beyond eddy diffusivity – random walk formulation Practical issues with particle tracking • – – • – – • – • • – – Numerical method Euler forward Higher order (e.g. RK4, adaptative) Random number generator Quality of Rn generator shape of distribution (Hunter et al. 1993, Ross & Sharples 2004) Land boundaries Important practial problem, not discussed, no good solution Artificial 2D convergence Spatially varying diffusivity ‘naïve’ RW does not work, but never addressed in larval transport Need correction velocity from low to high diffusivity (Visser 1997)