Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Virtual work wikipedia , lookup
Measurement in quantum mechanics wikipedia , lookup
Fictitious force wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Transmission (mechanics) wikipedia , lookup
Mitsubishi AWC wikipedia , lookup
Nuclear force wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Deformation (mechanics) wikipedia , lookup
Centrifugal force wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Viscoelasticity wikipedia , lookup
Hooke's law wikipedia , lookup
Classical central-force problem wikipedia , lookup
Centripetal force wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Friction-plate electromagnetic couplings wikipedia , lookup
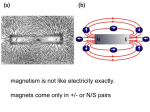
Force Measurement Force is a quantity capable of changing the size, shape, or motion of an object. It is a vector quantity and, as such, it has both direction and magnitude. In the SI system, the magnitude of a force is measured in units called Newton, and in pounds in the British/American system. Force Measurement If a body is in motion, the energy of that motion can be quantified as the momentum of the object, the product of its mass and its velocity. If a body is free to move, the action of a force will change the velocity of the body. Force Measurement There are four basic forces in nature: gravitational, magnetic, strong nuclear, and weak nuclear forces. The weakest of the four is the gravitational force. It is also the easiest to observe, because it acts on all matter and it is always attractive, while having an infinite range. Its attraction decreases with distance, but is always measurable. Therefore, positional "equilibrium" of a body can only be achieved when gravitational pull is balanced by another force, such as the upward force exerted on our feet by the earth's surface. Force Measurement Link-Type Load Cell The diagram above represents what might happen if a strip of metal were fitted with four gauges. An downward bend stretches the gauges on the top and compresses those on the bottom. A load cell may contain several similar strain gauges elements. 3 4 1 2 Shear Force Measurement Beam-Type Load Cell The strain gauges are bonded on the flat upper and lower sections of the load cell at points of maximum strain. This load cell type is used for low capacities and performs with good linearity. Its disadvantage is that it must be loaded correctly to obtain consistent results http://www.rdpelectronics.com/ex/hiw-sglc.htm Force Calculation Where: A is the cross-sectional area E is the modulus of elasticity P ea = AE v is Poissin’s ratio of the material Sg is a gauge factor Vo = vP & et = AE Sg P (1 + v )Vs 2 AE Sg P D R1 D R3 = = Sg ea = R1 R3 AE VO vSg P D R2 D R4 = = Sg et = R2 R4 AE VS Force Measurement Vo = Sg P (1 + v )Vs 2 AE VO VO= k PVS Therefore Force P is measured in terms of Voltage out put as VO VS Force Measurement This Load incorporates ring as the elastic element. Ring-Type The ring element can be designed to cover wide range loads by: SPR 3 • radius, •The thickness, t, •The depth w. v o = 1.79 3 = 1.79 PR3/(Ewt3) = K .P Where E is modulus of Elasticity of material; K for given ring is constant = 1.79 R3/(Ewt3) Out put Volts = Vo = S Vs and S is sensitivity of LVDT P vs Ewt Ewt 3 P = 0.56 vo 3 SR v s Strain Gauge or LVDT could be employed to measure displacement related to Force applied. In case of LVDT compression of the ring , the relationship between displacement and Load P and is given by: Load Cell R LVDT t w Ring-Type Load Cells Industrial Ring-Type Load Cells Torque: Forces that cause extended objects to rotate are associated with torques. Mathematically, the torque on a particle is defined as the cross-product: Where r r is the particle's position vector relative r to a pivot F is the force acting on the particle. Torque Measurement A circular shaft with four strain gages mounted on two perpendicular helices that are diametrically opposite one another as shown below. Gage 1 & 3 are mounted on right hand helix, sense a positive; while 2 &4 are mounted on left hand helix giving negative sense. The shearing stress in the circular shaft is related to the applied torque T by the equation: TD 16T t xz = = 2J p D3 1 2 3 4 Torque Measurement Where TD 16T t xz = = 2J p D3 D is diameter of the shaft J polar moment of inertia xz is shearing stress is Stress as per Hooke’s Law T is Torque applied is Poisson Ratio of Material 16T 1 + u 16T 1 + u e1 = ( ) ; e2 = ( ) 3 3 pD E pD E E is Modulus of Elasticity Sg is sensitivity of Strain Gage Vo is output voltage, and Vs is supplied voltage to Bridge VR1 VR2 VR3 VR4 16T 1 + u == == ( )Sg 3 R1 R2 R3 R4 pD E 16T 1 + n vo = ( )Sg v S = kT 3 pD E Torque Measurement Torque is measured by either sensing the actual shaft deflection caused by a twisting force, or by detecting the effects of this deflection. The surface of a shaft under torque will experience compression and tension. To measure torque, strain gage elements usually are mounted in pairs on the shaft, one gauge measuring the increase in length (in the direction in which the surface is under tension), the other measuring the decrease in length in the other direction. Torque Measurement A strain gage can be installed directly on a shaft. Because the shaft is rotating, the torque sensor can be connected to its power source and signal conditioning electronics via a slip ring. The strain gage also can be connected via a transformer, eliminating the need for high maintenance slip rings. The excitation voltage for the strain gage is inductively coupled, and the strain gage output is converted to a modulated pulse frequency. t's a measure of the forces that cause an object to rotate. Reaction torque is the force acting on the object that's not free to rotate. An example is a screwdriver applying torque to a rusted screw. With rotational torque, the object is free to rotate. Examples include industrial motor drives and gear reducers. Torque and RPM determine horsepower, and horsepower determines system efficiencies. Torque Magnetostriction effect Force or Torque Measurement Vertical Foot Force Abstract A capacitive transducer is developed which continuously measures the vertical component of foot forces during walking. The transducer is shaped like an insole and consists of two subtransducer units, the front and rear. The outputs of the two units are summed to give the total force exerted by the foot. Each unit has a multilayered structure. The basic layer is a 2 mm Neoprene sponge sheet sandwiched by two 50 μm copper foils. They as a whole form a capacitor. The other two layers are a driving shield and static shield, which minimise the effect of stray capacitance and power-line noise, respectively. The transducer is thin (3·8 mm), light (90 g) and flexible and so does not hinder the natural gait pattern. It can be attached to the sale of the shoe easily by elastic bands and Velcro straps. The accuracy of the transducer is well within ±10 per cent of the full scale. An error analysis is made to clarify the change in sensitivity owing to a localised foad. The results are used to compensate for the inherent nonlinearity of the transducer units.