Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Newton's laws of motion wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Internal energy wikipedia , lookup
Hunting oscillation wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Relativistic mechanics wikipedia , lookup
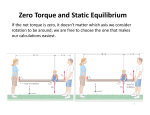
Physics 106: Mechanics Lecture 04 Wenda Cao NJIT Physics Department Rotational Work and Energy Torque, moment of inertia Newton 2nd law in rotation Rotational Work Rotational Kinetic Energy Rotational Energy Conservation Rolling Motion of a Rigid Object February 10, 2009 Torque Units and Direction The SI units of torque are N.m Torque is a vector quantity Torque magnitude is given by rF sin Fd Torque will have direction If the turning tendency of the force is counterclockwise, the torque will be positive If the turning tendency is clockwise, the torque will be negative February 10, 2009 Net Torque The force F1 will tend to cause a counterclockwise rotation about O The force F2 will tend to cause a clockwise rotation about O S 1 + 2 F1d1 – F2d2 If S 0, starts rotating Rate of rotation of an If S 0, rotation rate object does not change, does not change unless the object is acted on by a net torque February 10, 2009 Newton’s Second Law for a Rotating Object When a rigid object is subject to a net torque (≠0), it undergoes an angular acceleration S I The angular acceleration is directly proportional to the net torque The angular acceleration is inversely proportional to the moment of inertia of the object The relationship is analogous to F ma February 10, 2009 Strategy to use the Newton 2nd Law Draw or sketch system. Adopt coordinates, indicate rotation axes, list the known and unknown quantities, … • Draw free body diagrams of key parts. Show forces at their points of application. find torques about a (common) axis • • May need to apply Second Law twice to each part Translation: Fnet Fi ma Rotation: net i I Note: can have Fnet .eq. 0 but net .ne. 0 • Make sure there are enough (N) equations; there may be constraint equations (extra conditions connecting unknowns) • Simplify and solve the set of (simultaneous) equations. • Find unknown quantities and check answers February 10, 2009 The Falling Object A solid, frictionless cylindrical reel of mass M = 2.5 kg and radius R = 0.2 m is used to draw water from a well. A bucket of mass m = 1.2 kg is attached to a cord that is wrapped around the cylinder. (a) Find the tension T in the cord and acceleration a of the object. (b) If the object starts from rest at the top of the well and falls for 3.0 s before hitting the water, how far does it fall ? February 10, 2009 Newton 2nd Law for Rotation Draw free body diagrams of each object Only the cylinder is rotating, so apply S=I The bucket is falling, but not rotating, so apply SF=ma Remember that a = r and solve the resulting equations r a mg February 10, 2009 • • • • Cord wrapped around disk, hanging weight Cord does not slip or stretch constraint Disk’s rotational inertia slows accelerations Let m = 1.2 kg, M = 2.5 kg, r =0.2 m For mass m: y T mg Fy ma mg T T m (g a) r Unknowns: T, a support force at axis “O” has zero torque a FBD for disk, with axis at “o”: N T 0 + Tr I Mg I Tr m(g a)r 1 I Mr 2 1 2 Mr 2 Unknowns: a, 2 So far: 2 Equations, 3 unknowns Need a constraint: Substitute and solve: 2mgr 2mr 2 2 Mr Mr 2 mg (1 + 2 m 2mg ) M Mr a + r from “no slipping” assumption mg ( 24 rad/s 2 ) r(m + M/2) February 10, 2009 • • • • Cord wrapped around disk, hanging weight Cord does not slip or stretch constraint Disk’s rotational inertia slows accelerations Let m = 1.2 kg, M = 2.5 kg, r =0.2 m For mass m: y T mg Fy ma mg T T m (g a) r Unknowns: T, a mg ( 24 rad/s 2 ) r(m + M/2) a mg ( 4.8 m/s 2 ) (m + M/2) T m ( g a) 1.2(9.8 - 4.8) 6N support force at axis “O” has zero torque a mg 1 1 x f - x f vi t + at 2 0 + 4.8 32 21.6m 2 2 February 10, 2009 Rotational Kinetic Energy An object rotating about z axis with an angular speed, ω, has rotational kinetic energy The total rotational kinetic energy of the rigid object is the sum of the energies of all its particles 1 K R K i mi ri 2 2 i i 2 1 1 2 2 2 K R mi ri I 2 i 2 Where I is called the moment of inertia Unit of rotational kinetic energy is Joule (J) February 10, 2009 Work-Energy Theorem for pure Translational motion The work-energy theorem tells us Wnet 1 2 1 2 KE KE f KEi mv f mvi 2 2 Kinetic energy is for point mass only, no rotation Work Wnet dW F d s Power dW ds P F F v dt dt February 10, 2009 Mechanical Energy Conservation Energy conservation When Wnc = 0, Wnc KE + PE KE f + PE f PEi + KEi The total mechanical energy is conserved and remains the same at all times 1 2 1 2 mvi + mgyi mv f + mgy f 2 2 Remember, this is for conservative forces, no dissipative forces such as friction can be present February 10, 2009 Total Energy of a System A ball is rolling down a ramp Described by three types of energy Gravitational potential energy PE Mgh Translational kinetic energy Rotational kinetic energy Total energy of a system 1 Mv 2 2 1 2 KEr I 2 KEt 1 1 2 2 E Mv + Mgh + I 2 2 February 10, 2009 Work done by a pure rotation Apply force F to mass at point r, causing rotation-only about axis Find the work done by F applied to the object at P as it rotates through an infinitesimal distance ds dW F d s F cos(90 )ds F sin ds Fr sin d Only transverse component of F does work – the same component that contributes to torque dW d February 10, 2009 Work-Kinetic Theorem pure rotation As object rotates from i to f , work done by the torque f f f f f d W dW d Id I d Id dt i i i i i I is constant for rigid object f f i i W Id I d Power 1 2 1 2 I f Ii 2 2 dW d P dt dt February 10, 2009 An motor attached to a grindstone exerts a constant torque of 10 Nm. The moment of inertia of the grindstone is I = 2 kgm2. The system starts from rest. Find the kinetic energy after 8 s Find the work done by the motor during this time 1 2 K f I f 1600 J f i + t 40rad/s 5rad/s 2 2 I f W d ( f i ) 10 160 1600 J i 1 1 1 ( f i ) i t + t 2 160rad W K f K i I 2f Ii2 1600 J 2 2 2 Find the average power delivered by the motor Pavg dW 1600 200Watt dt 8 Find the instantaneous power at t = 8 s P 10 40 400Watt February 10, 2009 Work-Energy Theorem For pure translation Wnet KEcm KEcm , f KEcm ,i For pure rotation Wnet KErot KErot, f KErot,i 1 2 1 2 mv f mvi 2 2 1 2 1 2 I f Ii 2 2 Rolling: pure rotation + pure translation Wnet KEtotal ( KErot, f + KEcm, f ) ( KErot,i + KEcm,i ) 1 2 1 2 1 2 1 2 ( I f + mv f ) ( Ii + mvi ) 2 2 2 2 February 10, 2009 Energy Conservation Energy conservation When Wnc = 0, Wnc KEtotal + PE KErot, f + KEcm , f + PE f KErot,i + KEcm ,i + PEi The total mechanical energy is conserved and remains the same at all times 1 2 1 2 1 1 Ii + mvi + mgyi I 2f + mv2f + mgy f 2 2 2 2 Remember, this is for conservative forces, no dissipative forces such as friction can be present February 10, 2009 Total Energy of a Rolling System A ball is rolling down a ramp Described by three types of energy Gravitational potential energy PE Mgh Translational kinetic energy Rotational kinetic energy Total energy of a system 1 Mv 2 2 1 2 KEr I 2 KEt 1 1 2 2 E Mv + Mgh + I 2 2 February 10, 2009 Problem Solving Hints Choose two points of interest One where all the necessary information is given The other where information is desired Identify the conservative and non-conservative forces Write the general equation for the Work-Energy theorem if there are non-conservative forces Use Conservation of Energy if there are no nonconservative forces Use v = r to combine terms Solve for the unknown February 10, 2009 A Ball Rolling Down an Incline A ball of mass M and radius R starts from rest at a height of h and rolls down a 30 slope, what is the linear speed of the bass when it leaves the incline? Assume that the ball rolls without slipping. 1 2 1 2 1 1 2 2 mvi + mgyi + Ii mv f + mgy f + I f 2 2 2 2 1 1 2 2 0 + Mgh + 0 Mv f + 0 + I f 2 2 vf 2 2 I MR f 5 R 2 v 1 12 1 1 2 2 2 f Mgh Mv f + MR 2 2 Mv f + Mv f 2 25 R 2 5 vf ( 10 1/ 2 gh) 7 February 10, 2009 Rotational Work and Energy A ball rolls without slipping down incline A, starting from rest. At the same time, a box starts from rest and slides down incline B, which is identical to incline A except that it is frictionless. Which arrives at the bottom first? Ball rolling: 1 1 1 1 2 2 2 2 mvi + mgyi + Ii mv f + mgy f + I f 2 2 2 2 mgh Box sliding 1 1 2 2 mv f + I f 2 2 1 1 2 2 mvi + mgyi mv f + mgy f 2 2 1 2 mgh mv f 2 February 10, 2009 Blocks and Pulley Two blocks having different masses m1 and m2 are connected by a string passing over a pulley. The pulley has a radius R and moment of inertia I about its axis of rotation. The string does not slip on the pulley, and the system is released from rest. Find the translational speeds of the blocks after block 2 descends through a distance h. Find the angular speed of the pulley at that time. February 10, 2009 Find the translational speeds of the blocks after block 2 descends through a distance h. KErot, f + KEcm , f + PE f KErot,i + KEcm ,i + PEi 1 1 1 2 2 2 ( m1v f + m2v f + I f ) + (m1 gh m2 gh) 0 + 0 + 0 2 2 2 1 I (m1 + m2 + 2 )v 2f m2 gh m1 gh 2 R 2(m2 m1 ) gh vf 2 m + m + I / R 2 1 1/ 2 Find the angular speed of the pulley at that time. 1 2(m2 m1 ) gh f R R m1 + m2 + I / R 2 vf 1/ 2 February 10, 2009