Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Monte Carlo methods for electron transport wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Electron scattering wikipedia , lookup
Standard Model wikipedia , lookup
ATLAS experiment wikipedia , lookup
Compact Muon Solenoid wikipedia , lookup
Identical particles wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
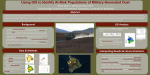
Real-Time Simulation of Dust Behavior Paul J. McLaurin UNC-CH, COMP 259 April 24, 2002 Motivation Want to model dust clouds generated by a fast-moving vehicle and simulate their behavior using physically based methods in real time Presented by Chen et al. in a 1999 paper (see references slide) Paul J. McLaurin Real-Time Simulation of Dust Behavior 2 Technique Use particle systems to represent dust particles Use Computational Fluid Dynamics (CFD) to compute the air flow around and behind the vehicle Render the particles using billboard textures with alpha transparency Paul J. McLaurin Real-Time Simulation of Dust Behavior 3 Process Analyze forces and factors that affect dust particle generation Look at dust particle behavior after generation Construct physically based empirical models for generating dust particles and for controlling their behavior Based on models and analysis of forces, divide dust behavior into three stages, and establish simplified particle systems for each stage Paul J. McLaurin Real-Time Simulation of Dust Behavior 4 Particle Properties Position (3D orientation and center location) Movement (velocity, acceleration, etc.) Color (RGB) Transparency (alpha) Shape (point, rectangle, cube, etc.) Density Mass Lifetime Blur head and rear pointers (for motion blur) Paul J. McLaurin Real-Time Simulation of Dust Behavior 5 Simulation Loop for Particles Create particle systems Initialize each particle’s parameters Each simulation frame: Create and remove particles Calculate and update particle parameters Adjust motion blur pointers Render particles Update particle systems’ range of activities Paul J. McLaurin Real-Time Simulation of Dust Behavior 6 Dust Generation Car presses down on tire, which crushes dirt and ejects dust particles from the sides of the tire Some particles stick to the tire and fly off after some amount of time Paul J. McLaurin Real-Time Simulation of Dust Behavior 7 Dust Generation (cont.) Moving air underneath and behind the vehicle creates a pressure gradient that will lift fine dust particles off the ground Paul J. McLaurin Real-Time Simulation of Dust Behavior 8 Parameters vehicle velocity: Vcar vehicle weight: WTcar tire angular velocity: tire tire radius: Rtire particle size: p particle density: p particle stickiness: p length, height, and width of vehicle: Lcar, Hcar, Wcar Paul J. McLaurin Real-Time Simulation of Dust Behavior 9 Parameters (cont.) environmental wind: Vwd density of dust on ground: gd average size of particles on ground: gd adhesion and wetness of ground: gd Paul J. McLaurin Real-Time Simulation of Dust Behavior 10 Fluid Dynamics Field of aerodynamics called “separated flow” helps simulate air flow behind vehicle Paul J. McLaurin Real-Time Simulation of Dust Behavior 11 Reynolds Number A metric for fluid flow VL Re v L and V are characteristic length and velocity v is the kinematic energy For a pipe, L is the pipe diameter and V is the velocity of the fluid flow Paul J. McLaurin Real-Time Simulation of Dust Behavior 12 Re for Vehicle Consider the Re for a vehicle: Vcar = 60 km/hr, L = 1m, v = 10-5 Re on the order of 106 With such a high Re, air flow around the edges of vehicle is turbulent However, turbulence is very hard to simulate, so flow will be approximated as a steady, low Re, laminar flow modified by random velocities in the high-Re turbulent region Paul J. McLaurin Real-Time Simulation of Dust Behavior 13 Air Flow Around Vehicle Paul J. McLaurin Real-Time Simulation of Dust Behavior 14 Navier-Stokes Equations We assume steady, low speed, and incompressible flow in low Re region. Gravity force of air is ignored. Incompressible Navier-Stokes equations: ux v y w z 0 1 ut uux vuy wuz x uxx uyy uzz Re 1 v t uv x vvy wv z y v xx v yy v zz Re 1 w t uw x vwy wwz z w xx w yy w zz Re Paul J. McLaurin Real-Time Simulation of Dust Behavior 15 Navier-Stokes (cont.) dx dy dz u ,v ,w dt dt dt u 2u ux ,uxx 2 x x p x x p is the pressure, Re is the Reynolds Number Paul J. McLaurin Real-Time Simulation of Dust Behavior 16 Poisson Equation Separates pressure effects from the partial derivatives to model elliptic nature of flow ux v x w z Dp t 2 d 1 Dp uux vuy wuz uxx uyy uzz dx Re d 1 uv x vvy wv z v xx v yy v zz dy Re d 1 uw x vwy wwz w xx w yy w zz dz Re Paul J. McLaurin Real-Time Simulation of Dust Behavior 17 Solving Equations These equations are solved using Ghia’s approach Alternating-Direction Implicit (ADI) scheme is applied to the momentum equations Successive-Over-Relaxation (SOR) method is used to solve the Poisson pressure equation These methods will not be discussed in detail here Paul J. McLaurin Real-Time Simulation of Dust Behavior 18 Laminar Flow Velocity calculation V ui vj wk V V u2 v 2 w 2 To simulate the turbulence of separated flow, add random velocities to the steady flow e is a random unit vector dV Vair V e L dy 2 L Lcar ,W car ,H car Paul J. McLaurin Real-Time Simulation of Dust Behavior 19 Pressure Gradient The initial velocity of a particle is generated by the pressure gradient. Follows Bernoulli’s Theorem: ph 1 p gh Vh2 0 air 2 air ph and Vh are pressure and the velocity at height h known from CFD results and velocity of vehicle p 0 is the pressure on the ground Pressure gradient: Paul J. McLaurin 1 2 p0 ph airgh Vh 2 Real-Time Simulation of Dust Behavior 20 Lifting Process Convert the pressure gradient energy to the dust initial disturbance kinetic energy The pressure gradient will raise the dust particles from the ground, imparting a momentum energy that is proportional to the pressure difference between the initial and final level 1 m pV02 Ahp0 ph 2 Paul J. McLaurin Real-Time Simulation of Dust Behavior 21 Lifting Process (cont.) is a chosen ratio of momentum energy applied to the particle (between 0 and 1) A is the cross-section area of the particle We can now compute the initial speed of particle: Ahair 2gh Vh2 V0 p p Paul J. McLaurin Real-Time Simulation of Dust Behavior 22 Newton Once in the air, each particle obeys Newton’s Law Forces on each particle: Fdrag turbulent air friction Fwd wind Fgrv gravity Fshape small, randomly generated force to compensate for air drag due to particle shape Paul J. McLaurin Real-Time Simulation of Dust Behavior 23 Forces Acting on Particle Paul J. McLaurin Real-Time Simulation of Dust Behavior 24 Friction Drag Force Use Batchelor’s expression for a 3D body of surface area A in a stream of speed U to get the total friction drag: Fdrag k pU 2 ARe 1 2 k is a number depending on the shape of the particle (k = 1 approximates a simple shape) U is the relative speed between the air and the particle: U Vair Vcar Vwd Vp Paul J. McLaurin Real-Time Simulation of Dust Behavior 25 Friction Drag Force (cont.) In vector form: Fdrag Vair Vcar Vwd Vp U Fdrag Paul J. McLaurin Real-Time Simulation of Dust Behavior 26 Total Force and Acceleration Let Fp be the total force acting on a particle, P the position, Vp the velocity, Ap the acceleration, and mp=pp the mass The dust particle’s behavior is described by the following equations: Fp Fdrag Fshape Fgrv Ap Paul J. McLaurin Fp mp Real-Time Simulation of Dust Behavior 27 Motion Equations The wind itself can be a velocity field and is changeable every frame. Thus: Vp V0 Vwd t1 A p dt t0 P P0 t1 V dt p t0 Using Euler’s method: Vi Vi1 A p t Paul J. McLaurin Pi Pi1 Vi t Real-Time Simulation of Dust Behavior 28 Dust Behavior Algorithm For the known current state of a particle compute the next state: Vi Vi1 A p t Pi Pi1 Vi t Initial velocity of particle is given by: Ahair 2gh Vh2 V0 p p Initial velocity is added to current wind velocity Paul J. McLaurin Real-Time Simulation of Dust Behavior 29 Dust Behavior Algorithm(cont.) Define a finite grid coordinate for a vehicle model in a box volume (3D flow field for CFD computation) Width of box is 3-5 times vehicle’s width Length is 8-10 times vehicle’s length Paul J. McLaurin Real-Time Simulation of Dust Behavior 30 Dust Behavior Algorithm(cont.) Solve Navier-Stokes equations using ADI and SOR methods Number of particles is proportional to predefined ground dust density, size, and wetness Paul J. McLaurin Real-Time Simulation of Dust Behavior 31 Results — Slow! This method is very slow (not real time) Solving the Navier-Stokes equations takes 7 minutes on an SGI O2 workstation with a single MIPS R5000 and 64 MB of memory Paul J. McLaurin Real-Time Simulation of Dust Behavior 32 Simplified Dust Particle Systems To speed up the calculations, divide dust particle’s behavior into three stages: Fluid Turbulence Particle Momentum Airborne Drift Paul J. McLaurin Real-Time Simulation of Dust Behavior 33 Fluid Turbulence Pre-compute the laminar flow at any point in the flow volume off-line This avoids having to compute the CFD solution on the fly Vair is computed using: dV Vair V e L dy 2 Laminar portion of Vair is read directly from memory Paul J. McLaurin Real-Time Simulation of Dust Behavior 34 Fluid Turbulence (cont.) Vwd is provided, which can be a function of time Fdrag can then be calculated immediately without CFD computation: 1 Fdrag k pU ARe 2 2 Assume Reynolds number of the air, the cross section, and the density of the particle are constant: Fdrag cU 2 c k p ARe Paul J. McLaurin 1 2 Real-Time Simulation of Dust Behavior 35 Fluid Turbulence (cont.) If velocity of car changes, fluid data is no longer valid Several key frames of the velocity field are computed with different vehicle velocities and the closest frames are interpolated between Fire off another process to re-compute the CFD solution (not implemented yet) Paul J. McLaurin Real-Time Simulation of Dust Behavior 36 Particle Momentum Turbulent air becomes insignificant after some amount of time At this point, Fgrv and Fdrag are the primary forces governing particle behavior This stage continues until the dust particle’s velocity is very close to the wind velocity Paul J. McLaurin Real-Time Simulation of Dust Behavior 37 Airborne Drift At this point, the particle begins to move with constant velocity towards the ground because Fgrv and Fdrag are balanced Small, low-density particles are suspended in the air and drift A particle drifts until it dies by either hitting the ground or floating too far from the vehicle Paul J. McLaurin Real-Time Simulation of Dust Behavior 38 Improved Performance Use of the simplified particle system stages allowed for 4 FPS with 3000 particles on an SGI O2 with a single MIPS R5000 and 64 MB of memory Paul J. McLaurin Real-Time Simulation of Dust Behavior 39 Results 2000 particles at 4 FPS on an Onyx II Paul J. McLaurin Real-Time Simulation of Dust Behavior 40 Paul J. McLaurin Real-Time Simulation of Dust Behavior 41 Paul J. McLaurin Real-Time Simulation of Dust Behavior 42 Video 1 20,000 particles Not real-time Around 2 minutes per frame Paul J. McLaurin Real-Time Simulation of Dust Behavior 43 Video 2 20,000 particles Not real-time Around 2 minutes per frame Paul J. McLaurin Real-Time Simulation of Dust Behavior 44 References Chen, Jim X., Xiaodong Fu, and Edward J. Wegman. “Real-Time Simulation of Dust Behavior Generated by a Fast Traveling Vehicle.” ACM Transactions on Modeling and Computer Simulation. Vol. 9, No. 2, April 1999, p. 81–104. Paul J. McLaurin Real-Time Simulation of Dust Behavior 45