Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
History of invasive and interventional cardiology wikipedia , lookup
Arrhythmogenic right ventricular dysplasia wikipedia , lookup
Electrocardiography wikipedia , lookup
Management of acute coronary syndrome wikipedia , lookup
Mitral insufficiency wikipedia , lookup
Cardiac surgery wikipedia , lookup
Myocardial infarction wikipedia , lookup
Coronary artery disease wikipedia , lookup
Quantium Medical Cardiac Output wikipedia , lookup
Dextro-Transposition of the great arteries wikipedia , lookup
Automatic
Optimum Phase Selection
In Cardiac CT Imaging
Master Thesis
Fahmi Noor
Place
Supervisor
Referee
2nd Referee
Date
Siemens Medical Germany
CTE Physical Application
Siemensstrasse 1, Forchheim
Dr. Herbert Bruder
Prof. Dr. Dieter Höpfel
Dr. Rainer Stotzka
01.11.2004 – 31.03.2005
Abstract
In cardiac CT imaging, an optimal phase determination for reconstruction is a
prerequisite for good image quality. The aim of this work is to develop an
alternative gating strategy in optimizing cardiac image reconstruction by
automatically defining the optimum gating phase of the heart independently from
patient-patient and cycle-cycle variability.
Automatic optimum phase detection introduced by Phillips Research
laboratories is reproduced for this purpose. The method successfully shows
motion pattern of the heart, and delivers the systole-diastole phase directly from
a motion map. However in coronary CT angiography – the domain of Cardiac
CT imaging, the method is not accurate enough. Motion of the arteries are
overshadowed by the chamber motion, thus the real motion pattern of arteries
are not presented well.
Defining subset voxel containing mainly the coronary arteries will expand the
functionality of the algorithm. Instead of the whole axial slices, the motion map is
derived from the subset voxels. Additional histogram HU weighting function is
also used in order to focus the motion calculation on pixels containing contrast
media.
The algorithm is validated with three patient data from University of Tübingen
measured with a 16 slices scanner. The right coronary artery is analyzed and
the cycle-dependent local phases are determined. Comparing image
reconstructed with the proposed algorithm and images reconstructed with
conventional method, shows the improvement in the image quality and
demonstrates the benefit of the automatic method. The coronary artery is shown
with high contrast and in good continuity with reduced motion artifact.
Nevertheless, its limitation to eliminate residual step artifact is one important
topic, which needs to be investigated in the further work.
Keyword: Cardiac CT Imaging, gating strategies, Motion Map, optimum phase
selection
Acknowledgements
In the Name of Allah, the Most Gracious, the Most Merciful.
First and foremost, I would like to thank Dr. Herbert Bruder for the chance he
gave to me for doing my master thesis under his supervising. And also for his
support in my work, for the time he spent with me, for all discussion and help he
provided me, and also for a lot of fresh idea he came with in solving the
problems. I learn so much from him and I thank him a lot for that.
In particular I would like to thank Mr. Thomas Flohr, who allowed me to do my
master thesis in his Department at Siemens Medical.
I would also like to thank all the CTE-PA employees for their friendliness and
their support. In spite of my lack of German language, they always show a lot of
patience and take time to talk to me, and answer my numerous questions.
Thanks to them, the adaptation to a working culture was not too difficult.
In this chance, I would also like to thank Prof. Dieter Höpfel who supported my
work and help me finishing my thesis, evaluate and examine my work, and also
for his visit to the factory even it takes a whole day to get to the factory from his
place.
Last, I would like here to mention the most important people in my life: my Papa
and Mama, my princess Loly and all of my brothers, people who always support
me no matter what, for always pray for me and for always giving me happiness.
I hope this report is useful for everyone who would like to read it.
Chapter 1. Introduction
1 Introduction
1.1 Motivation
Cardiac disease and in particular coronary artery disease (CAD) are still the
leading causes of death in Europe and the US. In 1998 about one in five deaths
in Europe and the United States was related to cardiac disease. Approximately,
600,000 CAD-related deaths were reported every year in Europe, nearly
500,000 reported in USA. More than 2.5 million such investigations are
performed every year in Europe and the USA. These data show high need and
importance of reliable non-invasive imaging for early and preventive diagnosis of
CAD and other cardiac disease [1].
The goal diagnosis with non-invasive cardiac CT imaging is to identify the
location and degree of stenosis in CAD that may be hemodynamically relevant
in terms of perfusion and viability of myocardium, cardiac function, and coronary
blood flow [1], [14]. Beside the CAD, other cardiac structures such as the
cardiac chambers, valves, myocardium, pericardium, are important targets for
diagnostic of cardiac disease that may cause reduced or even lack of cardiac
functionality.
Since its introduction in 1972, X-Ray computed tomography has become a
robust and frequently used non-invasive imaging modality for vascular diagnosis
[1]. However at that time image of the heart and coronary is very limited in
spatial and temporal resolution. It is difficult to reconstruct images of the heart
because of its continuous motion. With standard image reconstruction methods,
the motion causes artifacts in the image, which is of limited use in diagnostic
imaging.
Nowadays, Cardiac CT imaging has become more feasible with the availability
of multi-row scanners [1], [11], [13]. Multiple detectors provide reliable way to
obtain non-invasive coronary angiograms. In combination with ultra-fast rotating
gantries, and latest UFC detectors images at good temporal and high spatial
resolution can be reconstructed.
Siemens itself has produced such a modality for this purpose. With the
SOMATOM Sensation 16, and the latest Sensation Cardiac 64, dedicated scan
and reconstruction technique have been newly developed that allow virtually
motion-free 3D and also 4D imaging of the heart, especially the coronary vessel
tree that can be visualized at high level detail.
1.2 Background
The domain of cardiac CT is coronary angiography. It needs stable phase of
heart with minimum motion in order to reconstruct the coronary arteries sharply
delineated. Basically ECG information is used to synchronize the reconstruction
with the motion-state of the heart and the data acquisition.
The problems come when considering the electrocardiogram cycle-to-cycle
variability that causes the optimal phase to vary strongly for each cycle. Even
1
Chapter 1. Introduction
normal people with regular heartbeat also have differentiation between cycles in
their cardiac signal. And it is getting worse for patients with an arrhythmia case
whose heartbeat is irregular and changes rapidly.
There is also a consideration about patient-to-patient variability in defining the
stable phase. Depending on how strong patient’s cardiac muscle, heart rate, and
other personal characteristics may result in a different stable phase for different
patients. Thus, the stable phase may vary strongly from patient to patient [2].
Furthermore, each anatomy of interest, e.g. every branch of the coronary
arteries, may be reconstructed better at different cardiac phase, for example
coronary artery, which lies in the surface of the cardiac chamber. Dedicated
cardiac CT acquisition is needed due to the presence of extensive motion.
Currently clinicians have to choose the reconstruction phase, usually between
50%-65% of RR-peaks of the ECG signal [1], [2]. With this manual determination
of the stable cardiac phase, several high-resolution data sets must be
reconstructed, which is inefficient and a time-consuming task. Sometimes
several images reconstructions with incremented cardiac phase have to be
made.
Therefore, an alternative strategy in determining the optimum reconstruction
phase is needed, independently from patient-patient and cycle-cycle variability
and that also can be applied to small structures of the heart, especially the
coronary arteries.
Several techniques have already been introduced to improve the image quality
in cardiac CT. Including the knowledge-based methods involving well-known
physiological information of the heart by using model-based reconstruction
approaches. In contrast to using the ECG waveform data, it may also be
possible to extract motion information from the acquired projection data [3]
(known as Kymogram). Other modalities, e.g. phonocardiogram and Doppler
ultrasound may be taken as an additional source to obtain more information
about the patient-specific heart motion [2].
1.3 Aims of the Work
The aim of this thesis is to develop an alternative strategy in optimizing the
reconstruction technique in cardiac CT by automatically defines the stable phase
of the heart independently from patient-patient and cycle-cycle variability. A
simple and efficient image-based technique is introduced which is able to deliver
patient-specific stable cardiac phases in an automatic way. Here also introduced
a technique that uniquely analysed specific structure of the heart –coronary
arteries into the closer look with the same method.
In summary the step of the work is as follow:
1. Reproduce the automatic patient-specific optimum phase selection using
the motion map introduced by Phillips Research Laboratories.
2. Expand the functionality of the algorithm for specific voxel-subset of the
heart, in this case right coronary artery - RCA.
3. Validate with patient data
4. Analysis and summary
2
Chapter 1. Introduction
1.4 Thesis Overview
This report consists of 7 chapters with three additional appendices information.
The next chapter, chapter 2 discusses the basic anatomy of the heart, and also
explains about the ECG signal, its derivation and basic interpretation of the
signal form. The heart phase is also discussed to get the basic understanding
about the motion pattern of the heart.
Chapter 3 presents an overview of CT data acquisition and image
reconstruction, setup of a CT system, and the basic scan method used
nowadays. The specific cardiac CT Imaging technique is discussed in chapter
4, including the explanation of triggering and gating strategies as basic workflow
in developing the algorithm in this work.
Chapter 5 discusses about the presented method, and explains about the basic
idea, and the algorithm used. The experiment and result data is shown in
chapter 6. The last, Chapter 7 provides the conclusion of the work, the
discussion and an outlook to future work in this field.
3
Chapter 2. Anatomy of Heart
2 Anatomy of Heart
The Heart is the most important organ in the human body and the motor of the
blood circulation system. A brief introduction anatomy of the heart and the
coronary arteries will be given below, including ECG-signal derivation and heart
phase.
2.1 Heart anatomy1
The heart is located between the lungs, behind and
slightly to the left of the breastbone [4] (see fig. 2.1). As
part of the circulation system, the heart constantly pumps
blood throughout the body.
The heart has four separate compartments or chambers
(two atriums and two ventricles). The atriums receive
and collect the blood coming to the heart. The atriums
Fig 2.1 Location of Heart
then deliver blood to the ventricles, which pump blood
away from the heart through powerful, rhythmic contractions. The right parts of
the heart contain always the de-oxygenated blood from the whole of the body,
and Left parts always have fresh blood contain oxygen from the lungs.
The functions of the different heart parts are here described more detail.
Right atrium: It receives de-oxygenated blood
from the body through the superior vena cava
(head and upper body) and inferior vena cava
(legs and lower torso). The tricuspid valve, which
separates the right atrium from the right ventricle,
opens to allow the de-oxygenated blood collected
in the right atrium to flow into the right ventricle.
Right ventricle: It receives de-oxygenated blood
as the right atrium contracts. The pulmonary valve
leading into the pulmonary artery is closed,
allowing the ventricle to fill with blood. Once the
ventricles are full, they contract. As the right
Fig 2.2 Blood Flow
ventricle contracts, the tricuspid valve closes and
the pulmonary valve opens. The closure of the tricuspid valve prevents blood
from backing into the right atrium and the opening of the pulmonary valve allows
the blood to flow into the pulmonary artery toward the lungs.
Left atrium: It receives oxygenated blood from the lungs through the pulmonary
vein. Then, the blood passes through the mitral valve into the left ventricle.
Left ventricle: It receives oxygenated blood as the left atrium contracts. The
blood passes through the mitral valve into the right ventricle. The aortic valve
leading into the aorta is closed, allowing the ventricle to fill with blood. Once the
ventricles are full, they contract. As the left ventricle contracts, the mitral valve
closes and the aortic valve opens. The closure of the mitral valve prevents blood
from backing into the left atrium and the opening of the aortic valve allows the
blood to flow into the aorta and flow throughout the body. That’s why the muscle
of left ventricles has more thickness so that it can pump the blood away to the
whole body.
1
Most of materials used in this section is summarized from [1],[4] including some parts
of text and pictures
4
Chapter 2. Anatomy of Heart
Beside that 4 main chamber of the heart, the rest detail part of heart is also
important to ensure the heart works properly. Some of these parts are described
as follow:
• Papillary muscles: They attach to the lower portion of the interior wall of the
ventricles. They connect to the chordae tendineae, which attach to the
tricuspid valve in the right ventricle and the mitral valve in the left ventricle.
The contraction of the papillary muscles opens these valves. When the
papillary muscles relax, the valves close.
• Chordae tendineae: They are tendons linking the papillary muscles to the
tricuspid valve in the right ventricle and the mitral valve in the left ventricle.
As the papillary muscles contract and relax, the chordae tendineae transmit
the resulting increase and decrease in tension to the respective valves,
causing them to open and close.
• Tricupsid valve: It separates the right atrium from the right ventricle. It
opens to allow the de-oxygenated blood collected in the right atrium to flow
into the right ventricle. It closes as the right ventricle contracts, preventing
blood from returning to the right atrium; thereby, forcing it to exit through the
pulmonary valve into the pulmonary artery.
• Mitral valve: It separates the left atrium from the left ventricle. It opens to
allow the oxygenated blood collected in the left atrium to flow into the left
ventricle. It closes as the left ventricle contracts, preventing blood from
returning to the left atrium; thereby, forcing it to exit through the aortic valve
into the aorta.
• Pulmonary valve: It separates the right ventricle from the pulmonary artery.
As the ventricles contract, it opens to allow the de-oxygenated blood
collected in the right ventricle to flow to the lungs. It closes as the ventricles
relax, preventing blood from returning to the heart.
• Aortic valve: It separates the left ventricle from the aorta. As the ventricles
contract, it opens to allow the oxygenated blood collected in the left ventricle
to flow throughout the body. It closes as the ventricles relax, preventing
blood from returning to the heart.
• Superior vena cava: It is one of the two main veins bringing de-oxygenated
blood from the body to the heart. Veins from the head and upper body feed
into the superior vena cava, which empties into the right atrium of the heart.
• Inferior vena cava: It is one of the two main veins bringing de-oxygenated
blood from the body to the heart. Veins from the legs and lower torso feed
into the inferior vena cava, which empties into the right atrium of the heart.
• Aorta: It is the largest single blood vessel in the body. This vessel carries
oxygen-rich blood from the left ventricle to the various parts of the body.
• Pulmonary artery: It is the vessel transporting de-oxygenated blood from
the right ventricle to the lungs.
• Pulmonary vein: It is the vessel transporting oxygen-rich blood from the
lungs to the left atrium.
2.2 Coronary Arteries
As the heart continuously contracts and relaxes, the muscle needs a constant
supply of nutrients and oxygen. The coronary arteries are the network of blood
vessels that carry oxygen- and nutrient-rich blood to the cardiac muscle tissue.
The blood leaving the left ventricle exits through the aorta, the body’s main
artery. Two coronary arteries, referred to as the "left" (Left Main Trunk - LM) and
"right" (Right Coronary Artery- RCA), emerge from the beginning of the aorta,
near the top of the heart.
5
Chapter 2. Anatomy of Heart
The initial segment of the left coronary artery is called the left main coronary.
This blood vessel is approximately the width of a soda straw and is less than an
inch long. It branches into two slightly smaller arteries: the left anterior
descending (LAD) coronary artery and the left circumflex coronary (CX) artery.
The left anterior descending coronary artery is embedded in the surface of the
front side of the heart. The left circumflex coronary artery circles around the left
side of the heart and is embedded in the surface of the back of the heart.
Just like branches on a tree, the coronary arteries branch into progressively
smaller vessels. The larger vessels travel along the surface of the heart;
however, the smaller branches penetrate the heart muscle. The smallest
branches, called capillaries, are so narrow that the red blood cells must travel in
single file.
Considering the smallness of the coronary arteries, it should give us the idea
that the reconstruction of images with good quality for the coronary is a great
technical challenge [1].
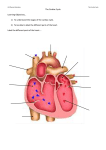
The anatomy of the whole heart, including the placement of the coronary
arteries is illustrated in the following figure.
Fig.2.3 Anatomy of the heart
6
Chapter 2. Anatomy of Heart
2.3 Cardiac electrical activity
2.3.1 Electrical conduction system: a brief overview
The heart is composed primarily of muscle tissue. A network of nerve fibres
coordinates the contraction and relaxation of the cardiac muscle tissue to obtain
an efficient, wave-like pumping action of the heart.
The sinoatrial node (often called the SA node or
sinus node) serves as the natural pacemaker for the
heart. Nestled in the upper area of the right atrium, it
sends the electrical impulse that triggers each
heartbeat. The impulse spreads through the atriums,
prompting the cardiac muscle tissue to contract in a
coordinated wave-like manner. The impulse that
originates from the sinoatrial node strikes the
atrioventricular node (or AV node), which is situated
in the lower portion of the right atrium. The
atrioventricular node in turn sends an impulse
through the nerve network to the ventricles, initiating
Fig.2.4 Electrical Conduction System,
(1) SA Node, (2) AV Node, (3)
the same wave-like contraction of the ventricles. The
Common AV Bundle, (4) Right and
electrical network serving the ventricles leaves the
Left Bundle branches
atrioventricular node through the right and left bundle
branches. These nerve fibres send impulses that cause the cardiac muscle
tissue to contract.
2.3.2 The standard 12-lead ECG
The electrocardiogram (ECG) consists of recording the bioelectrical signal of the
heart muscles. The heart’s electrical activity is recorded from electrodes on the
body surface. ECG is a powerful clinical tool for diagnosing cardiac
abnormalities. In the standard 12-lead ECG, electrodes have to be placed in a
particular spatial orientation [5] as indicated below.
Fig.2.5. Standard Limb Leads
7
Chapter 2. Anatomy of Heart
This diagram illustrates ECG waves and intervals as well as standard time and
voltage measures on ECG paper.
Fig.2.6 ECG Wave,
and its interval
The meaning of ECG waves and intervals are here explained [5].
• P-wave: It represents the sequential activation (depolarisation) of the right
and left atriums. For normal ECG, the P-wave duration is inferior to 120 ms.
• QRS complex: It represents the right and left ventricular depolarisation.
• ST - T-wave: This wave represents the ventricular repolarisation.
• U-wave: This wave is not always observable and its origin is not clear, but it
ay represent “after the polarisations” in the ventricles.
• PR-interval: This is the time interval from onset of atria depolarisation (Pwave) to onset of ventricular depolarisation (QRS complex).
• QRS duration: This is the duration of ventricular muscle depolarisation. It is
normally inferior to 100 ms.
• QT-interval: It represents the duration of ventricular depolarisation and
repolarisation.
• RR-interval: It represents the duration of ventricular cardiac cycle. This is an
indicator of ventricular rate. For a normal ECG, the heart rate is about 60 90 bpm
• PP-interval: It represents the duration of atria cycle.
2.4
Heart phase2
The right side receives oxygen-poor blood from the various regions of the body
and delivers it to the lungs. In the lungs, oxygen is absorbed in the blood. The
left side of the heart receives the oxygen-rich blood from the lungs and delivers
it to the rest of the body.
2.4.1 Human heart: two pumps in one
The cardiac cycle is divided in two phases, the systole and the diastole. The
contraction of the cardiac muscle tissue in the ventricles is called systole. When
the ventricles contract, they force the blood from their chambers into the arteries
leaving the heart. The left ventricle empties into the aorta and the right ventricle
into the pulmonary artery. The relaxation of the cardiac muscle tissue in the
ventricles is called diastole. When the ventricles relax, they make room to
accept the blood from the atriums.
2
Most of materials used in this section is summarized from [6] including some parts of
text and pictures
8
Chapter 2. Anatomy of Heart
In the following sections, the different cardiac phases are described [6]. The
corresponding ECG and some physiological values (aortic, ventricular and atria
pressures, and also ventricular volume) are supplied.
2.4.2 Systole
2.4.2.1
Atrial systole
Aortic press
Ventricular press
Atrial press
Ventricular volume
Prior to atrial systole, blood
has been flowing passively
from the atrium into the
ventricle through the open
atrioventricular valve.
During atrial systole the
atrium contracts and tops
off the volume in the
ventricle with only a small
amount of blood. Atrial
contraction is complete
before the ventricle begins
to contract.
The "a" wave occurs when
the
atrium
contracts,
Fig.2.7 Atrial Systole
increasing atrial pressure.
Blood arriving at the heart cannot enter the atrium so it flows back up the jugular
vein, causing the first discernible wave in the jugular venous pulse. Atrial
pressure drops when the atriums stop contracting.
Concerning the ECG, an impulse arising from the sinoatrial node results in
depolarisation and contraction of the atriums (the right atrium contracts slightly
before the left atrium). The P-wave is due to this atrial depolarisation. The PR
segment is electrically quiet as the depolarisation proceeds to the
atrioventricular node. This brief pause before contraction allows the ventricles to
fill completely with blood.
2.4.2.2
Isovolumetric contraction
The atrioventricular valves
close at the beginning of
this phase. Mechanically,
ventricular
systole
is
defined as the interval
between the closing of the
atrioventricular valves and
the opening of the aortic
and pulmonary valves.
Aortic press
Ventricular press
Atrial pressure
Ventricular volume
The atrioventricular valves
close when the pressure in
the ventricles exceeds the
pressure in the atriums. As
the ventricles
contract
isovolumetrically
(their
Fig.2.8 Isovolumetric Contraction
9
Chapter 2. Anatomy of Heart
volume does not change) the pressure inside increases, approaching the
pressure in the aorta and pulmonary arteries.
The electrical impulse propagates from the atrioventicular to allow the ventricles
to contract from the apex of the heart towards the coordinate system. The QRS
complex is due to ventricular depolarisation, and it marks the beginning of
ventricular systole. It is so large that it masks the underlying atrial repolarisation
signal.
2.4.2.3
Rapid ejection
At the beginning of this
phase the aortic and
pulmonary valves open.
While
the
ventricles
continue contracting, the
pressure in the ventricles
exceeds the pressure in
the aorta and pulmonary
arteries; the aortic and
pulmonary valves open,
blood exits the ventricles,
and the volume in the
ventricles
decreases
rapidly.
Aortic press
Ventricular press
Atrial press
Ventricular volume
Fig.2.9 Rapid Ejection
As more blood enters the
arteries, pressure built until the flow of blood reaches a peak. The "c" wave of
atrial pressure is not normally discernible in the jugular venous pulse. Right
ventricular contraction pushes the tricuspid valve into the atrium and increases
atrial pressure, creating a small wave into the jugular vein. It is normally
simultaneous with the carotid pulse.
2.4.2.4
Reduced ejection
The reduced ejection is
the last phase of the
systole. At the end of this
phase the aortic and
pulmonary valves close.
After
the
peak
in
ventricular and arterial
pressures), blood flow
out of the ventricles
decrease and ventricular
volume decreases more
slowly.
Aortic press
Ventricular press
Atrial press
Ventricular volume
When the pressure in
the ventricles falls below
the pressure in the
arteries, blood in the
Fig.2.10 Reduced Ejection
arteries begins to flow
back toward the ventricles and causes the aortic and pulmonary valves to close.
This marks the end of ventricular systole mechanically. The T-wave is due to
10
Chapter 2. Anatomy of Heart
ventricular repolarisation. The end of the T-wave marks the end of ventricular
systole electrically
2.4.3 Diastole
2.4.3.1
Isovolumetric relaxation
Isovolumetric
relaxation
indicates the beginning of
the
diastole.
At
the
beginning of this phase the
atrioventricular valves are
closed.
Aortic press
Ventricular press
Atrial press
Ventricular volume
Throughout this and the
previous two phases, the
atrium in diastole has been
filling with blood on top of
the closed atrioventricular
valve,
causing
atrial
pressure to rise gradually.
The "v" wave is due to the
back flow of blood after it
hits the closed atrioventricular valve. It is the second discernible wave of the
jugular venous pulse. The pressure in the ventricles continues to drop.
Ventricular volume is at a minimum and is ready to be filled again with blood. As
illustrated in the following ECG, no cardiac electrical activity is recorded during
the isovolumetric relaxation.
Fig.2.11 Isovolumetric Relaxation
2.4.3.2
Rapid ventricular filling
Once the atrioventricular
valves open, blood that
has accumulated in the
atriums flows rapidly into
the ventricles.
Ventricular
volume
increases rapidly as blood
flows from the atriums into
the ventricles.
Aortic press
Ventricular press
Atrial press
Ventricular volume
As well as during the
previous phase, no cardiac
electrical
activity
is
recorded during the rapid
ventricular filling in the
ECG
Fig.2.12 Rapid ventricular filling
11
Chapter 2. Anatomy of Heart
2.4.3.3
Reduced ventricular filling
Compared to the previous
phase, ventricular volume
increases more slowly
during
the
reduced
ventricular filling.
The ventricles continue to
fill with blood until they are
nearly full.
As
illustrated
in
the
following ECG, no cardiac
electrical
activity
is
recorded during this phase.
Aortic press
Ventricular press
Atrial press
Ventricular volume
Fig.2.13 Reduced ventricular filling
2.4.4 ECG signal, Heart Phase and Motion pattern of the heart
The movement of the chamber during its activity phase determines the motion
pattern of heart. The pattern is repeated from cycle to cycle following the activity
phase described before.
From the explanation above, it is clear to see that the ECG signal represents
exactly the electrical activity of the heart, but only corresponds relatively to the
motion of the heart. The ECG information does not always represent the heart
phase with an adequate accuracy [12]. During the diastole phase, for example
no signal recorded related to the heart activity of ventricular filling.
Nevertheless, the ECG signal can be used as the hint of determining phase of
the heart during its activity. Extracting the R-peaks from the signal would give
indication to relative phase at certain heart activity, thus the indication for motion
pattern of the heart.
12
Chapter 3. CT Overview
3 Computed Tomography Overview
In general terms, the principle of computed tomography (CT) consists of
measuring the spatial distribution of the attenuation coefficient from the scan
object, which is examined from different directions and of computing images
from these data.
3.1 Historical overview
Computed tomography became a real feasible technique of imaging with the
development of the modern computer technology (1970). But the physical
principles, which are used for the CT, were discovered at the end of the 19th
century and developed during the 20th century. The main facts concerning the
development of computed tomography are here given [16]
1895: W.C. Röntgen discovers “a new kind of rays”, later referred to as “X-rays”
or “Röntgen rays” in his honour.
1917: J.H. Radon develops the mathematical foundation for reconstructing
cross-sectional images from transmission measurements.
1963: A.M. Cormack describes a technique for calculating the absorption
distribution in the human body.
1972: G.N. Hounsfield and J. Ambrose conduct the first clinical CT
examinations.
1974: 60 clinical CT installations (head scanners).
1975: First whole body CT scanner in clinical use.
1979: Hounsfileld and Cormack awarded the Nobel Prize.
1989: W.A. Kalender and P. Vock conduct the first examinations with spiral CT.
1994: Introduction of EBCT for cardiac imaging
1998: Introduction of multi-slice detector systems.
2000: Approximately 30 000 clinical CT installations (whole body scanners).
2002: Multi-slice scanning with 16 slices per rotation
2004: Advanced 64 slices Scanner and dedicated cardiac CT scanner
introduced: including Z-sharp technology.
3.2 CT Basic Principle
3.2.1 Measurement principle3
In computed tomography, the primary intensity I0 of X-rays and the intensity
attenuated by the object have to be recorded [7], [8]. Then, they are used to
calculate the attenuation value along each ray from source to detector. The
integral along the ray path of the attenuation coefficient µ is given by
(3.1)
I = I 0 exp − ∫ µ ( x, y )dxdy
(
)
The reconstructed function I is the distribution of linear attenuation coefficient µ
since, for monochromatic X-rays, the logarithm of the transmitted intensity is
proportional to the integral of the attenuation coefficient along the path.
Theoretically, to compute the exact two-dimensional distribution µ(x, y), an
infinite number of line integrals have to be recorded. However, a high finite
number of measurements are sufficient to compute an image to a good
3
Most of materials used in this section is summarized from [7], [8] including some parts
of text and pictures
13
Chapter 3. CT Overview
approximation. It is necessary to carry out measurements in all directions, i.e. at
least over an angular range of 180°, and to determine many narrowly spaced
data points for each projection. A simple measurement set up fulfilling this
purpose is sketched in the following figure.
Fig.3.1 Measuring an Object in CT
The main advantage of CT as compared to projection imaging is the ability to
separate objects according to their position in the projection direction, i.e. to
avoid the confusion that arises when the shadows of multiple objects are
superimposed. This, combined with high precision measurements and digital
displays, gives CT the ability to resolve objects with extremely small contrast.
For example, conventional X-ray CT systems are able to easily distinguish
objects whose relative difference in attenuation coefficient is a fraction of one
percent.
In the 70’s, a radiation source emits a pencil beam
and the detector placed opposite registers the
intensity, attenuated by the object. For a given
angular position, this set up of radiation source and
detector is moved linearly. These results in an
intensity profile recorded for parallel rays. By
determining the ratios of the primary intensity and the
attenuated intensities recorded behind the object and
taking their logarithms, an attenuation profile results
which is generally termed a projection. Projections
are measured for successive angular positions. In
Fig.3.2 Fan Beam geometry
the previous figure, the set of projections is
determined in parallel ray geometry over 180°. CT scanners today measure
typically in fan-beam geometry over an angular range of 360°.
3.2.2 Image Generation
Information on the as yet unknown distribution of the attenuation coefficient
µ(x,y) is only given in form of a set of projection values, which is also termed the
“Random transform” of the image. An inverse transformation has to be carried
out to determine µ(x,y). In today’s CT scanners the so-called convolution-back
projection procedure is usually utilised. This is illustrated in the following figure.
14
Chapter 3. CT Overview
X-ray
Convolution
No conv
0 projection
1 projection
3 projections
N projections
Image obtained
N projections
CT value profil
Fig.3.3. Image Reconstruction in CT by convolution and
backprojection
The starting point is always a
matrix, which contains only
zeros. Then, each projection
value is added to all the
picture elements along the
direction in which it has been
measured. In general, each
detail in the object and
represented
in
the
attenuation profile does not
only contribute to the pixel
value at the desired image
point, but to the entire image
as well.
Even when considering only
three projections it becomes
apparent that an unsharp
image will result. To avoid
this, each projection has to
be convoluted before the
backprojection
with
a
convolution kernel.
After convolution, the resulting values are added. In essence, this represents a
high pass filter procedure, which generates over- and undershoots at object
boundaries. Such a method enables to counteract the unsharpening.
Convolution additionally offers the possibility to image characteristics by the
choice and design of the convolution kernel. A relatively weak high pass filter
reduces spatial resolution as well as image noise, whereas a strong high pass
filter has the opposite effect. For cardiac imaging for example, soft kernel B30f is
used in order to get the optimum spatial resolution.
As explained above, CT measures
and
computes
the
spatial
distribution of the attenuation
coefficient µ(x,y). However, the
physical quantity µ is not very
descriptive
and
is
strongly
dependent on the spectral energy
used. By displayingµ, a direct
comparison of images obtained on
scanners with different voltages
Fig.3.4 HU scale for several organs
and filtration would be limited.
Therefore the Hounsfield scale (Fig
3.4) is used in CT. In these HU units, CT values characterise the attenuation
coefficient of the tissue in each volume element relative to the µ-value of water.
µ HU =
µ − µ water
* 1000
µ water
(3.2)
The obtained CT values of different tissues are therefore defined to be relatively
stable and to a high degree independent of the X-ray spectrum.
15
Chapter 3. CT Overview
3.2.3 Setup of a CT System
A CT System comprises several components. These basically include [15]:
- The scanning unit, including the gantry with tube and detector system.
- The patient table
- Image Processor for image reconstruction
- The console (represents the man-machine interface)
Scanning Unit (Gantry)
A CT scanning system consists of an X-Ray unit, which functions as a
transmitter, and a data acquisition unit, which function as the receiver. In
Commercial CT system these two components are housed in a ring shaped unit
called Gantry
X-Ray Components (Tube)
Manufacturers of CT systems use X-Ray tubes with variable focal spot sizes.
Volumes for which good low-contrast resolution is essential need to be scanned
with a large focal spot and high power, whereas the high-resolution images with
thin slices requires a small focal spot. Tubes used in the CT scanners have a
power rating of 20-60 kW at voltages of 80-140 kV. The system can however be
operated at maximum power for a limited time only. These limits are defined by
the properties of the anode and the generator.
X-Ray Shielding
CT scanner is equipped with grids, collimators and filters to provide shielding
against scattered radiation, to define the scan slice and to absorb the low energy
portion of the x-ray spectrum. In this way, both patient and examiners are
protected.
Detector
The detector system plays an important role in the interaction of the CT
components. It converts the incident x-rays of varying intensity to electric
signals. These analog signals are amplified by downstream electronic
components and converted to digital pulse.
Fig.3.5 inside a CT,
For example Sensation
Cardiac 64 Scanners.
(a) Tube
(b) Beam Collimator
(c) Generator
(d) UFC Detector
Picture is taken from [15]
3.2.4 Scanner Parameters
16
Chapter 3. CT Overview
Scanner parameters determine the image quality. Optimal performance of CT
systems can be achieved only with the optimal combination of parameters.
These parameters differ form one application to another. Set of parameters
called the scan protocol. Observing heart in the cardiac application would need
different set of parameters compared to the CT application of brain perfusion.
Collimation
The collimation and together with focal size determine the quality of the slice
profile. There are 2 terms of collimator: Source collimator placed directly in front
of the radiation source to form maximum required fan beam radiation and
determining the dose, and another term Detector Collimator positioned directly
in front of the detectors used to shield against scattered radiation and preventing
image artifacts.
Slice Thickness
Images can be reconstructed with
slice thickness following the detector
collimator. The widest range of
possibilities in the selection of
collimation and reconstructed slice
thickness is only possible in spiral
CT using multi detector system.
With Multi-slice detector slice
thickness equal to or larger than
detector collimator can be used.
Fig.3.6 Slice Profile in relation with collimation
Increment
Increment determines the distance
between images reconstructed from data volume. If an appropriate increment is
used, overlapping images can be reconstructed. A clinical useful overlap is
about 30%-50%.
Pitch
An important parameter for spiral CT scanning is the spiral pitch p. The spiral
pitch is defined as the ratio of the table feed per rotation d to the collimated
slice-width Scol. This table feed is given in mm per 360° rotation, and for single
slice scanners with a rotation time of 1 s the table feed corresponds to the table
feed in mm/s.
Pitch = table feed per rotation / collimation.
The pitch is a dimensionless quantity and is of great importance for image
quality and dose considerations. The pitch value should be selected in the range
1 and 2. It should be larger than 1 in order to cover a given scan volume as fast
as possible and to reduce the dose compared with sequential CT, and should
not exceed 2 to exclude gaps in sampling the object along the z-axis. The term
pitch is changing for multi-slice application to adapt the number of slices used in
reconstruction. (See chapter 3.4)
Rotation Time
Rotation Time is time interval needed for a complete 3600 rotation of the tubedetector system around the patient. It affects the spiral scan length and thus the
coverage of scan range during a certain period of time. Rotation times determine
the temporal resolution of the reconstruction and deal with the motion artifacts.
This applies especially for instance, to constantly moving organs such as the
heart.
17
Chapter 3. CT Overview
mAs
The mAs value is the product of the tube current (e.g. 200 mA) and the rotation
time (e.g. 0.5 s). This selected mAs determine the dose used, thus deal with the
image noise and detectability of scanner. For example, higher mAs values will
reduce the noise, and improving the detectability of lower contrast, that is used
for visualization of soft tissue. Visualizations of bone or lungs as well as contrast
study require lower dose from lower mAs.
3.3 Scan modes
The routine operation of a CT scanner requires only a few scan modes: taking a
survey radiograph for orientation over in the anatomy in question, selecting
slices or scan regions and scanning them in the sequential or spiral CT mode[7].
3.3.1 Survey Topogram
To select the position of single slices or complete scan regions it has proven
very helpful to generate a survey radiograph similar to a conventional
radiograph. For this purpose the X-ray tube is kept in a fixed angular position
and the patient is transported through the field of measurement at low speed,
with radiation emitted continuously or in pulsed mode. This topogram is also
useful for the dose reduction strategy.
3.3.2 Sequential CT
For more than two decades CT examinations
consisted of scanning single slices sequentially. A
cross-sectional image is produced by scanning a
transverse slice of the body from different angular
position while the tube and detector rotate 3600
around the patient with the table being stationary.
After scanning a single slice, the patient is
transported for a defined distance or scans
increment, mostly selected equal to the chosen
slice thickness. Then the next scan is taken and
Fig.3.7 Sequential CT
the procedure is repeated. This examination
mode, which meanwhile has been largely replaced
by spiral CT, is relatively time demanding since time is required for table feed.
Examination of complete organs typically takes from five to twenty minutes in a
way. Nowadays, sequential scanning mode is still used in application for head
scan.
3.3.3 Volume scanning – Spiral CT
For sequential CT, two basic requirements hold true which cannot be neglected
without negative implications for image quality: the object to be scanned must
not move during data acquisition, and the scan geometry must be perfectly
planar. Indeed, if the patient moves during the scan, motion artifacts result. In
the same way, when the focus and detector do not travel in the same plane,
artifacts also arise. However, spiral CT builds precisely upon violating these two
principles. As a matter of fact, it no longer requires a planar geometry and it
moves the patient during scanning.
18
Chapter 3. CT Overview
Spiral CT constitutes a volume-scanning mode in non-planar geometry with the
patient scanned continuously in space and in time. Spiral scans encompass
many rotations of the tube-detector system, while the patient is transported
continuously through the gantry. The focus of the X-ray tube of course continues
to travel on a circular path; however, relative to the patient it follows a spiral
trajectory. This is illustrated in the following figure.
Fig.3.8 Scanning Principle for Spiral CT
The actual image reconstruction in spiral CT is in principle the same as in
sequential CT. Identical algorithms; convolution kernels and the same hardware
are used. However, an additional pre-processing step is required, the so-called
z-interpolation. This is intended to generate a consistent planar data set from the
spiral data for an arbitrary image position. The principal difference relative to
sequential CT and a significant advantage at the same time is the inherent
possibility of choosing image positions and reconstruction increments freely and
retrospectively. The direct coupling between the scan position and the image
position, which is unavoidable in sequential CT, no longer exists for spiral CT.
3.4 Multi-slice Spiral Scanning4
Until 1998 in practice all CT scanners were equipped with single-row detector
systems. Consequently, the scanned volume in a given time was limited, as far
as the table feed was restricted. Four-slice CT systems have been introduced
since 1998, eighth- and sixteen-row detector systems since 2001. Afterwards,
32, 40 slices scanner is introduced and for 2004, 64 slices scanner is available.
It meant an important reduction of volume scan times by making possible faster
table feed.
Fig.3.9 Illustration for
Development in CT
system, from sequential
scanning, to single slice
spiral scanning, and now
the multi-slice spiral CT
scanning. *ISD = Inter
Slice Delay
4
Most of materials used in this section is summarized from [1], [3] including some parts
of text and pictures
19
Chapter 3. CT Overview
3.4.1 Multi-slice Pitch
As mentioned above, in multi-slice scanners, with more than one slice (typically
M= 2, 4, 16, 32 or 64 simultaneously scanned slices) and with rotation time
between 0,375s and 2s, the previous simple relation of pitch no longer applies.
d
S
The ratio of table feed d to total slice collimation S is termed the pitch: p ' =
For multi-slice scanner number of simultaneously scanned slices (M) has to be
taken into account for this parameter. p =
d
M .S col
It is obvious that p ' = M . p . E.g. a p’=4 means a p= 1 for a 4-slices CT and this
could produce misunderstandings. Therefore now the term of ‘feed per rotation’
is used instead of pitch in the user interfaces.
3.4.2 Basic scanner geometry
The following figure shows a schematic view of the n-slices CT scanner [1]. The
multi-row detector forms a cylindrical surface with the radius Rf + Rd. With Rf is
the focus-isocenter distance, and Rd is the detector-isocenter distance. Focus
and detector are fixed with respect to each other. During a spiral scan, the focus
moves along a spiral (helical) path with the radius Rf. The z-position of the focal
spot is given by the following equation:
z F (α ) =
pScol
(α − α 0 ) + z 0
2π
(3.3)
z0 is the start z-position. α0 is the start angle. By definition, zF=z0 for α=α0.
Scol is the slice-width of one of the M = n simultaneously acquired slices, i.e. the
centre-to-centre distance Sdet of the corresponding detector rows scaled to the
centre of rotation.
In the isocenter, the z-position of slice k, is given by the following equation:
M −1
z (α , k ) = z F (α ) +
− k S col
2
y-axis
(3.4)
y-axis
Detector
k=n
…
1
Rd
0
Detector
zF(α)
γ
α
Rf
Focus
z-axis
x-axis
β
zF(α,k)
Focus
Fig 3.10 Schematic view of the geometry of n-slices CT scanner
Projection onto the x-y plane (left) and projection onto the y-z plane for α=π/2(right)
20
Chapter 3. CT Overview
During the scan, NP,2π projections per rotation are measured, which are
characterised by their projection angle αn. Within a projection, each individual
ray is characterised by its fan angle βm and by its index slice k. The sampled
angles are given by the following equations.
α n = α 0 + n∆α
βm = m −
∆α =
2π
N P , 2π
(3.5)
N +1
+ a ∆β
2
is
the
projection
angle
increment.
n = 0, K, ( N P − 1) is the projection index, and NP is the
total number of projections acquired during a spiral
scan. ∆β =
β fan
Fig.3.11 Sampled Angles
projection in spiral scanning
is the fan angle increment. βfan is the
N
total detector fan-angle, and N is the number of channels in each detector row,
with m = 1, K , N . ‘a’ is the so-called alignment, which takes into account that the
central ray does not necessarily have to pass through the isocenter.
3.4.3 Rebinning
The plane perpendicular to the z-axis that contains the focus is referred to as the
midplane. α and β uniquely specify the projection of a ray into the midplane. It is
possible to replace, through rebinning, the projection angle α with another angle,
which is noted θ. θ is the azimuthally angle. θ = α + β −
π
2
α is used to label rays when projection data are in the form of fan-beam
projections, whereas θ is used when projection data are in the form of parallel
projections, which are easier to use for computing than the fan-beam
projections.
The general approach for z-interpolation is to use the data redundancy in 360°
CT scanning, because in any rotation of the X-ray tube, each line integral or
projection value is measured one time in one direction with the angle α and one
time in the opposite direction with the angle α+π [1], [7].
With the use of these opposite
projections and of the rebinning
methods it is possible to
determine the projection at an
arbitrary angular position, and
with repeating this method to
synthesize a second spiral with
both data sets offset with a angle
difference of 180°.
The
logarithmic
attenuation
values, i.e. the line integrals of
the
object’s
attenuation
coefficient µ along the measured
rays, are denoted by f(n,m,q).
Using the equation relating α
and θ, a partial rebinning from
fan-beam multi-slice projections
Fig.3.12 Rebinning
process: From fan-beam
projections to parallel projections
21
Chapter 3. CT Overview
f(n,m,q) to no equidistantly sampled parallel multi-slice projections g(l,m,q) by
resorting and interpolation in the projection angle direction can be performed.
Thus, a parallel projection is obtained by assembling rays from several fanbeam projections.
This rebinning process generates a spiral of multi-slice non-equidistantly parallel
projection. The rays in these parallel projections are tilted against the x-y plane
by the cone-angle γ. Because the rays in a parallel projection correspond to
different locations of the X-ray tube on the spiral focus path, the rays within one
parallel projection also have a channel-dependent z-position.
The z-positions of the rays in the generated sampled parallel projections are
given by the following equation.
M −1
(3.6)
z (l , m, k ) = z F (l , m ) +
− k S col cos(β m )
2
The term M − 1 − k S col cos(β m ) takes into account the fact that the distance
2
between the focus and the azimuthal direction depends on the fan angle. zF(l,m)
is the focus z-position of the ray corresponding to the azimuthal angle θl and to
the fan angle βm. It can be calculated using the equation relating αn and θl.
z F (l , m ) =
pS col
π
θ l + − β m − α 0 + z 0
2π
2
(3.7)
In this way, the z-positions for a parallel multi-slice projection at a given
azimuthal angle θ can be determined.
3.4.4 Multi Row Detector Design
Multi row detector utilizes the radiation delivered from x-ray tube more efficiently
than single row detector. By simultaneously covering several slices, the scan
time can be reduced significantly, or the smallest can be scanned within the
practicable scan times. Using the adaptive array detectors, the rows inside the
detector are very narrow, becoming wider toward its outer edges in the zdirection (longitudinal axes). A combination of collimation and electronic
interconnections provide considerable flexibility in the selection of the slice
thickness. At the same time the space required by the detector septa, and
therefore the unused space is minimized.
Fig.3.13 Multi row detector (Left) and the adaptive array arrangement (case 16 slices)
22
Chapter 3. CT Overview
3.5 Image Evaluation and Image Post Processing5
The first obvious results of any CT examination are the axial cross-sectional
images. Since these images are already available in digital form on a storage
medium, they can be processed immediately by the processor. The evaluation
of geometrical parameters such as distance, area, angle, and volume as well as
density measurements are part of clinical routine. The tissue density for example
can be determined by using intensities value averaged over a defined area.
The term 2D and 3D refer to the
image content. Views showing
entire volumes are referred to as
3D Display [15]. Examples of the
2D post processing capabilities for
instance is zoom and shift image
segments.
CT mainly used the transverse as
the imaging plane. Therefore
views of other orientation (axial or
coronal, see figure 3.13) have to
Fig.3.14 Reconstruction Orientation
be reconstructed from original
images. Some possibilities of further reconstruction is introduced:
• MPR – Multi Planar Reconstructions
Transaxial images are combined to form volume stack. The volume can be
reformatted to secondary images in selected planes (sagittal, coronal or oblique)
• MIP (or MinIP) - Maximum (or Minimum) Intensity Projection
Maximum (or Minimum) projection through the entire volume, which will show
the part contain the maximum (or minimum) attenuation value.
• SSD – Shaded Surface Display
Surface images of tissue structure are created out of the volume dataset. A
three dimensional object is calculated from voxels, whose threshold values are
within a specific density range
• VRT – Volume Rendering Technique
Possibility to render different tissues, which have different densities, as a 3D
object in different colors and with different brightness and opacity
Fig.3.15 Some example of further reconstruction; from left to right: image result from MPR, MIP, SSD and VRT
5
Most of materials used in this section is summarized from [15], [16] including some
parts of text and pictures
23
Chapter 4. Cardiac CT
4 Cardiac CT
Due to the motion characteristic of the heart, it is very difficult to make cardiac
image reconstruction with a reasonable result based on standard methods. The
motion causes artifacts in the image, which is of limited use in diagnostic
imaging. Therefore, a special algorithm dedicated for this cardiac imaging is
absolutely required.
4.1 ECG-correlated cardiac image acquisition6
4.1.1 The Use of ECG Information
As mentioned in the previous chapter, the movement pattern of the heart varies
within the cardiac cycle. The strongest movement is present during contraction
of the atriums and ventricles in systole. In the diastolic phase of the cardiac
cycle less movement is present during the filling phase. Image acquisition and
reconstruction need to be synchronised as accurately as possible with the
movement of the heart, i.e. by using ECG information that is recorded in parallel
with the scan data acquisition.
ECG information can also be used to perform dedicated exposure-reduction for
cardiac applications. It is also important to limit radiation exposure while
maintaining the diagnostic quality.
The intensity of the ECG is representative to the global electrical activity of the
heart and correlated to its movement (see chapter 2.3). The following sections
provide information about ECG-correlated data acquisition and ECG-controlled
tube output acquisition developed in the CT system.
4.1.2 Prospective multi-slice ECG triggering
For ECG-synchronised sequential imaging in phases of slow cardiac motion (i.e.
the diastolic phase), a prospective trigger is derived from the ECG trace to
initiate the CT scan, with a certain, user-selectable delay time after the R-peak.
The delay time for scan acquisition after an R-peak is calculated from a given
phase parameter for each cardiac cycle individually, (e.g. a percentage of the
RR-interval time as delay after an R-peak, see next part in this chapter) based
on a prospective estimation of RR-intervals. Usually, the delay is defined such
that the scans are acquired during the diastolic phase of the heart.
For instance, a sixteen slices CT scanner allows for simultaneous acquisition of
sixteen adjacent slices per prospective ECG trigger for sequential coverage of
the heart volume. As the patient table has to move sixteen slices in between the
scans, one heartbeat has to be skipped for typical heart rates. This process is
illustrated in the following figure 4.1. The exact examination time depends on the
patient’s individual heart rate.
For diagnosis of dynamic processes in a specific region, ECG-triggered
acquisition can also be performed without table feed in between the scans. The
6
Most of materials used in this section is summarized from [1], [3] including some parts
of text and pictures
24
Chapter 4. Cardiac CT
same volume is then acquired in corresponding phases of consecutive
heartbeats. As no table feed is needed, scans can be acquired within every
heartbeat for moderate heart rates.
Fig 4.1 Sequential volume coverage with prospectively ECG-triggered four-slice scanning
The two different filter techniques that are commonly used for prospective
estimation of the position of the following R-peak are mean filtering (e.g. three
previous RR-intervals) and median filtering (e.g. five previous RR-intervals). The
median filter approach shows increased robustness for patients with moderated
arrhythmia as single extra-beats are eliminated.
4.1.3 Retrospective multi-slice ECG gating
ECG-triggered acquisition cannot be applied to continuous spiral acquisition with
mechanical CT, which represents an important step towards true volumetric
imaging. With spiral scanning, 3-dimensional evaluation based on overlapping
trans-axial image slices becomes feasible due to considerably improved spatial
z-resolution; faster scan speed and volume coverage. Retrospective ECG-gated
spiral scanning is an attempt to synchronise the reconstruction of a continuous
spiral scan to the movement of the heart by using an ECG-trace that is recorded
simultaneously. The acquired scan data are selected for image reconstruction
with respect to a pre-defined cardiac phase with a certain temporal relation to
the onset of the R-peak, which defines the start point of data that are used for
image reconstruction. Image reconstruction during different heart phases is
feasible by shifting the start point of image reconstruction relative to the R-peak.
For a given start position, an image stack at different z-positions covering a
small sub-volume of the heart can be reconstructed owing to multi-slice data
acquisition. The following figure 4.2 shows an example of how the cardiac
volume is successfully covered with stacks of images reconstructed in
consecutive heart cycles. All image stacks are reconstructed at specific timepoints or percentage phase during the cardiac cycle.
Continuous volume coverage can only be achieved when the table moves
slowly. Table feed is limited by the patient’s heart rate. Indeed, if the table
moves too fast, volume gaps between image stacks that are reconstructed using
data from different heart cycles are present. The table speed has to be selected
according to the minimum heart rate that is expected during the scan.
25
Chapter 4. Cardiac CT
Fig 4.2 Continuous volume coverage with retrospectively ECG-gated four-slice scanning
4.1.4 ECG gating and ECG triggering: advantages and trade-offs
With the advent of multi-slice acquisition, ECG-gated spiral scanning has
become feasible with significant advantages over prospective ECG triggering
that are important for clinical applications.
ECG-gated spiral scanning provides continuous volume coverage and better
spatial resolution in patients’ longitudinal direction as images can be
reconstructed with arbitrary, overlapping slice increments. Instead, ECGtriggered sequential scanning is usually restricted to scanning with nonoverlapping adjacent slices or slice increments with only small overlap. The scan
time to cover the heart is here directly proportional to the slice increment.
Retrospective analysis of the ECG results in less sensitivity to heart rate
changes during the scan. The ECG trace can be retrospectively analysed and
extra-systolic beats can be eliminated for reconstruction. With prospective ECGtriggering, the estimation of the next RR-interval may be wrong when heart rate
changes are present (e.g.. arrhythmia) and scan may be placed in inconsistent
heart phases.
ECG-gated spiral scanning provides faster volume coverage than ECG-triggered
sequential scanning as spiral scans data can be acquired continuously and
images can be reconstructed in every cardiac cycle. Relatively long travel
distances and travel times of the table are present for multi-slice acquisition in
between two consecutive scans. This limits the scan cycle time (minimum time
between start of two consecutive scans) and ECG-triggered scans my only be
obtained in every second heart cycle for higher heart rates.
ECG-gated spiral acquisition allows for imaging in a complete cardiac cycle
using the same scan data set. ECG-triggered acquisition targets only one
specific phase of the cardiac cycle and requires additional examinations to cover
more phases of the cardiac cycle.
During ECG-gated spiral imaging of the heart, data are acquired with a slow
table feed and continuous X-ray exposure. Thus, ECG-gated spiral acquisition
requires higher patient dose than ECG-triggered sequential acquisition. All spiral
26
Chapter 4. Cardiac CT
data can be used for image reconstruction in different cardiac phases and no
data have to be omitted. However, if only one dedicated cardiac phase (i.e.
diastolic phase) needs to be targeted by retrospective data selection, the
specific requirements of the clinical application should indicate whether ECGtriggered sequential scanning with less radiation exposure could provide
sufficient performance and image quality.
However, due to numerous benefits of ECG-gated spiral acquisition, dedicated
development is under way with the goal to reduce radiation exposure via
modified continuous spiral acquisition techniques. These techniques are
supposed to maintain the important benefits of ECG-gated spiral scanning with
X-ray exposure comparable to ECG-triggered sequential acquisition (see section
4.1.6)
4.1.5 ECG synchronisation strategies
With both prospective ECG triggering and retrospective ECG gating, the start
points of data acquisition or, respectively, data selection for reconstruction have
to be defined within each cardiac cycle during the acquisition. These start points
are determined relative to the R-peak of the ECG signal by a phase parameter.
The following phase determination strategies can be used.
Relative delay: A temporal delay Tdel relative to the onset of the previous Rwave is used for determining the start point of the ECG-triggered acquisition or
the start point of the reconstruction data interval. The delay time Tdel is
determined individually for each heart cycle as a given percentage δRR of the
RR-interval time TRR. For ECG triggering the RR-interval times have to be
prospectively estimated based on the prior RR-interval times.
Tdel,2=δRRTRR
Tdel,1=δRRTRR,1
R
R
R
ECG
TRR,1
TRR,2
Time
Fig 4.3 Phase definition strategies: Relative Delay
Absolute delay: Fixed delay times Tdel after onset of the R-peak defines the
start point of the ECG-triggered acquisition or the start point of the
reconstruction data interval.
Tdel
Tdel
R
R
R
ECG
TRR,1
TRR,2
Time
Fig 4.4 Phase definition strategies: Absolute delay
27
Chapter 4. Cardiac CT
Absolute reverse: Fixed times Trev prior to the onset of the next R-wave define
the start point of the ECG-triggered acquisition or the start point of the
reconstruction data interval. For ECG-triggering the position of the next R-wave
has to be prospectively estimated based on the prior RR-interval times.
Trev
R
Trev
R
R
ECG
TRR,1
Fig 4.5 Phase
TRR,2
Time
definition strategies: Absolute reverse
Different approaches are in use in clinical application practice today for different
clinical applications. For free motion imaging of small anatomical structures (e.g.
coronary arteries) in the diastolic phase with less cardiac motion, the relativedelay and absolute-reverse approaches are most frequently used.
For functional imaging with retrospective ECG-gated, images need to be
reconstructed in phases of maximum and minimum filling of the ventricles (enddiastole and end-systole). End-diastolic reconstruction is feasible with the
absolute-reverse approach, while the absolute-delay approach allows for most
consistent reconstruction in end-systolic phase.
Retrospective ECG gating allows for viewing and analysis of the ECG signal
after scan end. Data are available during all phases of the cardiac cycle. This
offers the possibility of retrospective modification of the synchronisation of the
ECG trace and data reconstruction. Editing of R-peak positions that are detected
inappropriately or that represent extra-systoles will have a beneficial effect on
phase-consistent volume imaging.
4.1.6 Radiation exposure reduction approach
Limiting radiation exposure while maintaining the diagnostic quality of ECGgated spiral scanning is an important goal of research and development. The
relatively high radiation exposure for ECG-gated multi-slice spiral imaging of the
heart is caused by continuous X-ray exposure and data acquisition at slow and
highly overlapping table feed. The slow table feed is a consequence of the
phase-consistent coverage of the heart volume in specific phases of the cardiac
cycle.
However, if the table feed is limited such that one phase can be covered
consistently, all other cardiac phases of the cardiac cycle can be covered as
well. If reconstruction in different cardiac phases is not needed, but rather only a
very limited interval (i.e. diastolic phase) in the cardiac cycle is targeted during
reconstruction, a significant portion of the acquired data and radiation exposure
is redundant. On-line reduction of the tube output in each cardiac cycle during
phases that are of less importance for ECG-gated reconstruction has a high
28
Chapter 4. Cardiac CT
potential for exposure reduction. The nominal output is only required during the
phases of the cardiac cycle that will be reconstructed.
A straightforward attempt is acquisition of limited scan data intervals in every
cardiac cycle with the X-ray radiation switched on and off (using prospective
ECG triggering) while the table is moved continuously with appropriate speed.
This approach enables continuous coverage of the heart volume with
overlapping slices. However, similar to ECG-triggered sequential scanning, the
risk of phase-inconsistent acquisition is implied if only moderate heart rate
changes are present during the scan.
Thus, another approach that maintains the benefits of ECG-gated spiral
scanning is proposed. Instead of switching the X-ray radiation on and off, the
tube output is modulated on-line with prospective ECG control. Within every
cardiac cycle the tube output is raised to the nominal level during a limited
interval in the diastolic phase. During the remaining part of the cardiac cycle the
tube output can be reduced by about 80%. Thus, continuous volume
reconstruction is still possible in all phases of the cardiac cycle.
100%
20
Fig 4.6 Retrospectively ECG-gated four slice spiral scanning
with prospectively ECG controlled tube current modulation for reduced radiation exposure
As illustrated in the previous figure, due to certain delays in tube-current
adaptation, the function of tube current over time forms a trapezoid curve. The
position of the windows of nominal tube output within the heart cycles needs to
be defined prior to the scan. For normal heart rates between 50 - 90 bpm (beat
per minute), the exposure is reduced by 35-50%. For increasing heart rate the
relative reduction decreases, as the time intervals of low tube output are shorter.
4.2 State of the Art: Cardiac CT Scanner7
Development in cardiac imaging is done not only in the reconstruction
technique, but also supported by CT scanner setup system itself. Increasing the
time and spatial resolution would give benefit in reducing the artifacts mainly
caused by the continuous motion of the heart. Several developments in the
gantry system and the detector slice are done for this purpose. Time resolution
is mainly determined by the rotation time of the tube along the patient body.
Usually time resolution is defined as a fractional (half or one eight) of the rotation
time depends on segment reconstruction technique used. Reduced the rotation
7
Most of materials used in this section is summarized from [14], [15] including some
parts of text and pictures
29
Chapter 4. Cardiac CT
time will provide better time resolution. Meanwhile, the spatial resolution can be
achieved by using the multi-slice scanner due to the overlapping data scanned.
One example of the implementation for cardiac-dedicated CT system is
Sensation Cardiac 64, provided by Siemens Medical. The scanner is
introduced worldwide at the beginning of 2004. It has the ability to provide the
rotation time of 0.33 s/3600, acquisition time of 8 s for the whole heart and
spatial resolution less than 0.4 mm. It would give the possibility to ‘freeze’
motion of the heart and ‘capture’ the cardiac image much better. Robust cardiac
acquisition is achieved even for the patient with high heart rate.
Fig 4.7 Sensation Cardiac 64,
CT system dedicated for
cardiac application.
The most important development applied in this CT system is the use of the
special STRATON-tube, together with the Z-sharp double sampling technique
and the UFC detector system supporting 64 DAS (Data Acquisition System).
4.2.1 Straton X-Ray Tube
The unique STRATON X-ray tube utilizes an electron beam that is accurately
and rapidly deflected to the rotating Anode, creating two precise focal spots
alternating 4,640 times per second. Straton is the smallest tube size that
enables the fastest rotation time of 0.33 s. Using direct cooling oil, the tube
enables the extremely high cooling rate of 5 MHU/min (heating unit loss)
resulting in compact design and no cooling delay needed.
Fig 4.8 STRATON tube,
creates 2 focal spots
rapidly, right picture
describe the size of the
tube.
30
Chapter 4. Cardiac CT
4.2.2 Z-Sharp Double Sampling
Straton x-ray tube produces double Xray projections reaching each detector
element. The two overlapping pro
jections result in an oversampling in zdirection, known as double z-sam
pling. Z sharp technology significantly
increases resolution by doubling the
number of measurement
points
utilizing the maximum 0.6 mm detector
width. The resulting measurements
interleave half a detector slice width,
doubling the scan information without
Fig 4.9 Z-sharp technique
a corresponding increase in dose.
Thus the spatial resolution of smaller than 0.4 mm is achieved. This finest
resolution is produced without any increasing in dose, and can be done for all
scan speed. As the result images come with previously unknown sharpness and
clarity with spiral artifacts can be eliminated.
4.2.3 UFC Detector
Siemens’ proprietary, Ultra Fast Ceramic (UFC™)
Detector and the corresponding 64-slice detector
electronics, enables a virtually simultaneous
readout of these two projections for each detector
element 2 x 32 slices for every viewing angle,
resulting in a full 64-slice acquisition with speed
data acquisition 2.5 Gbit/s. Speed and efficiency is
based on Ultra Fast Ceramic (UFC) Detector which
has the ultra short afterglow.
Fig 4.10 Detector System
The scanner is also supported by comprehensive software solution to help the
clinician to do the measurement better. This includes the Calcium scoring –
accurate risk assessment coronary heart disease, Heart View - for better look of
cardiac image, Vessel
View –semi automatic seg
mentation of the coronary
artery tree, Stenosis quan
tification, ventricular con
tour detection and cine
display for 4D CT data.
The whole application is
applied in order to get the
most from the cardiac CT
scanner in analyzing the
cardiac function
Fig 4.11 Sensation Cardiac 64, Cardiac image with fine details.
31
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
5 Automatic Optimum Phase Selection in Cardiac
CT Imaging
As mentioned in previous chapters, an optimal phase determination for
reconstruction is a prerequisite for good image quality in phase-correlated
cardiac imaging. Current cardiac reconstruction only allows for the use of a
global phase. However the cardiac motion pattern is very complicated. A better
approach is to find a local phase determination that might change from cycle to
cycle, or even from slice to slice in image stacks.
The algorithm for automatic optimum phase selection globally or locally is
described in the diagram below:
Fig 5.1 Flowchart depicts the proposed procedure for automatic determination of optimum phase in
reconstruction. The Optimum phase can be derived for both overall heart motion and for specific structure,
produce both globally and locally optimum phase.
The automatic phase selection in cardiac CT imaging is first introduced by
Phillips Research Laboratories by the end of 2004 [2]. The proposed algorithm
was used for globally characterizing the motion pattern of the heart. The method
successfully shows motion pattern of the heart, and delivers the systole-diastole
phase directly from a motion map (flowchart marked with
)
32
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
Projection data from gated cardiac CT scan are used, including all slice samples
from a multitude of cardiac phases (at %RR peaks). The motion information is
then extracted by simply detecting the changes of pixel values between images
at consecutive phases from all data set reconstructed.
But for specific part like coronary arteries, the result is not accurate enough. The
motion of coronary arteries doesn’t exactly coincide with the motion of the heart.
Coronary arteries have more complicated motion pattern. The artery lies in the
surface of the heart wall, from aorta to the epicardium. The motion of the artery
is overshadowed by the chamber motion, thus the real motion pattern of the
coronary arteries is not presented well. The motion map algorithm should be
improved and applied in an optimal way.
Introducing the subset voxel definition and histogram-weighting vector is one
solution proposed for this improvement. Here the algorithm is developed for the
purpose of analyzing motion pattern of specific structure and defining local
phase selection (flowchart marked with
).
5.1 Volume Dataset and Image Slice Reconstruction
In spiral acquisition, the acquisition time is related to a specific z-position by:
t z =T ROT
z − zo
p * S col
(5.1)
with p = pitch, Zo = start position, Scol = collimation width of one slice,
Trot=rotation time of the scanner [7].
In parallel with the spiral scanning, a synchronous ECG signal is recorded with
the same time domain e(t). Therefore, for each image slice position, the
corresponding cardiac cycle is known. (see fig 4.2 for more detail retrospectively
multi-slice ECG gating).
A certain delay related to R-R peaks is used to correlate projection data to a preselected cardiac phase. This reconstruction produces volume dataset V P, u , i ,
where P denotes a certain cardiac phase, e.g. as a percentage of R-R cycle,
(
T
u = (u x , u y , u z ) defines
the
centre
of
the
image
volume,
)
and
T
i = (i x , i y , i z ) denotes a discrete voxel i x, y , z = {1,2,....nVx , y , z } respectively describe the
dimension of image data used.
For good spatial resolution, normally the voxel reconstructed with the size of
n x * n y = 512 x 512 pixel, while n Z defines the number of image slices
reconstructed with certain increment dz , given by n = Z lastpos − Z 0 + 1 .
z
dz
(5.2)
The shift along the z-axis is considered, while the centre position in x- and ydirection is maintained. u k = (u x , u y , u z 0 + kd z )
T
; for k = 0,1,2...n z , with slice
index k indicates a specific z-position of the patient with the relationship:
Zk = Z0 + k * d z
(5.3)
33
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
The orientation of the reconstruction volume coincides with the orientation of the
acquisition geometry, where the z-axis is parallel to the axis of rotation.
The reconstruction of volume dataset is done by using the CardioRecon tool.
The parameters are set to specify the reconstructions: Field Of View, x-axis and
y-axis centre, kernel used, slice increment, and also the cardio parameters:
gating strategies, and phase %RR selected. More details about the
CardioRecon tool are explained at the end of this report.
5.2 Subset Voxel Definition
A subset voxel is needed when it is necessary to extract the motion information
in the region of interest of specific structure of the heart. A voxel mask is created
to cover a certain area at every slice that contains parts that of interest. In this
thesis work the analysis of the Right Coronary Artery and its motion pattern is
considered. Right coronary artery is the coronary vessel showing most
complicated motion.
To obtain a motion profile for small anatomic structures like coronary artery, it is
necessary to use volumes with an increased resolution. One thing that can be
done is by selecting the Field of View of appropriate size and centre in the
reconstruction, focusing to the parts of interest.
(
(
)
) (
)
Subset Voxel S P , v, j are created which define sub volumes S P , v, j ⊆ V P, u , i
to spatially resolve the motion information of specific structure contained. In the
same manner, v = (vx ,vy , vz )T defines the centre of the subset volume specific for
{
}
each slice, and j = ( j x , j y , j z )T denotes a discrete voxel jx, y, z = 1,2,....nxS, y,z .
5.2.1 Voxel masking
A voxel mask is needed to define the centre of the Subset Volume and the size
of the area of region of interest. The mask is derived from axial images
reconstructed at common gating phase 60% of RR peaks within the EGC
signals and will then be applied identically to volume dataset at all other phases.
With the positioning of the voxel mask (shifting-masking), the motion information
extraction now examined specifically for a certain anatomic structures (fig. 5.2).
A voxel mask characterizes the subset voxel’s centre v k = (v xk , v yk , u z + kd z )T ,
which varies for each slice k depending on the position of the target object in the
axial slice image. The centre position must be determined in order to follow the
structure over the spatial position slices by slices. Here the centre position in xand y- direction is no longer maintained.
The cubic subset volume has dimension n xS = n yS , which describes the size of
the subset area -the region of interest. And n zS defines the number of slices
along the z-direction which contains the specific object concerned, clearly
n zS ≤ n Vz .
34
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
Depending on the position of the voxel mask within the reconstruction volume,
T
T
n S n Sy S
n S n yS S
the subset voxel
is created with
v − x ⋅
⋅n ≤ j ≤ v + x ⋅
⋅n
2
k
dimension (n xS ⋅ n yS ⋅ n
) ≤ (n
S T
z
V
x
2
⋅ n Vy ⋅ n
z
)
V T
z
k
k
2
2
z
.
Fig 5.2 Voxel mask derived from each axial slices reconstructed at common 60%, the mask defines the
centre of the subset voxel and the radius
There are 2 methods developed to determine the centre and the radius of the
region of interest in the subset voxel definition: Manual definition and semi auto
definition.
5.2.2 Manual Definition of Subset Volume
The centre and the radius of the subset voxel are set
manually for each slice. User has to click twice on each
axial image: the centre position and another point
represent the radius area of the subset. The Algorithm
then calculated the cubic radius automatically and set
the maximum value from all slices as the common
radius.
Fig 5.3 Manual Definition
of Subset Volume
5.2.3 Semi Auto Definition of Subset Volume
With semi automatic definition user just need to click a
seed point on each axial slice as the centre position of
the object concerned, then the algorithm automatically
will grow the region by analysing pixel value around the
seed point with iteration process.
Region growing is done by simply calculating the
difference between the pixel value at centre point and
pixel value around its neighbourhood. Certain limit range
is set to ensure only pixel with certain value is included.
Fig 5.4 Region Growing
applied for Semi
automatic definition
35
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
Only pixels containing contrast agent in the range of 300 HU ± 50 HU are
considered. Commonly the Iodine concentration is used as the contrast medium.
The algorithm will set the maximum and minimum size of region grown to ensure
that the subset area is wide enough to capture the motion of the coronary and
small enough to focus the region of interest only on specific area concerned.
Again, the maximum value from all slices is set as the common radius.
After a certain region is grown, the centre of the subset voxel is modified based
on the size of the region. This re-defining centre process will ensure that the
subset voxel focus the covered area exactly into the coronary artery part.
5.3 Motion Information extraction
The reconstructions are made using several phases with certain step, e.g. for
each 2% or 5% of RR-peaks within ECG signals recorded. This produces 4D
data as whole cardiac image volume dataset or subset volume created with
certain voxel mask.
To obtain information about the motion pattern, the similarity between images at
the same slice index k for each consecutive phase is calculated. Similarity
between image slice V k Pl , u , i reconstructed at certain cardiac phase Pl and
(
(
)
( )
)
(
)
V k Pl −1 , u , i reconstructed at phase Pl −1 , or Vk Pl +1 , u , i reconstructed at phase Pl +1
is calculated. In case of coronary artery motion analysis, it is the subset volume
Sk Pl , v, j and the subset voxel reconstructed at the consecutive phases.
To optimize the efficiency of the algorithm, several simple methods can be used
in order to calculate the similarity between images, which is developed by
considering only the differences in pixel value.
There are two methods introduced here [2], [9]:
1. Subtract Method /Energy-based
n
nx
y
1
A(i x , i y ) − B (i x , i y )
∑∑
(n x * n y ) ix i y
Mean Absolute difference, MAD (A, B) =
2. Correlation Method
Correlation value, COR (A, B) =
nx
ny
ix
iy
∑∑
(5.4)
A(ix , i y ) − A * B (ix , i y ) − B
nx n y
nx ny
∑∑ A(ix , i y ) − A 2 ∑∑ B (ix , i y ) − B
i i
i i
x y
x y
(
)
(
)
2
(5.5)
With A and B are two image slices at two consecutive cardiac phases: between
S k Pl , u , i and S k Pl −1 , u , i or between S k Pl , u , i and S k Pl +1 , u , i .
(
)
(
)
(
)
(
)
The method simply shows the similarity of two image data sets (with COR)- or
the difference (with MAD or 1-COR). This value is used as the indication about
the motion state of the heart during that phase.
Consequently, within the phase where heart has its high motion, the images
would have great difference at the consecutive phases. In contrary, when heart
36
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
is in its stable phase, images within consecutive phases will have great
similarity. The differences between images in consecutive phases indicate the
amount of the motion of the heart within that phase. This linear relation simplifies
the algorithm to set the relative motion value directly equal to the difference
value between images in consecutive phases.
5.3.1 Histogram Weighting Function
The difference between images is calculated basically just by comparing pixels
between two image data. In order to focus the difference information only on the
coronary arteries part, a histogram weighting function is needed. The HU-based
histogram-weighting vector enables the algorithm to get rid of irrelevant pixel
values influenced by motion from other parts.
The weighting function is applied by multiplying the pixel value with certain
weighting vector based on the image histogram. It gives maximum weight factor
for pixel with certain important value and slightly reduced the weight factor to
zero for other pixel value. Coronary arteries or other parts containing blood with
contrast media will have the pixel value about 300 (contrast media has HU
≈300). Therefore the weighting vector used should have maximum value set to
intensity HU 250 to 350. It will ensure that only pixels containing contrast media
are considered.
Several type of weighting function can be applied for this purpose. Both
Gaussian function and trapezoid are proposed. Using the trapezoid function,
which is usually used in the post processing reconstruction, would give benefit
as the high flexibility to modify, not only in setting the centre but also the width of
the vector, slope, and range of the weighting vector.
Fig 5.5 Histogram Weighting function (a) Gaussian Function, (b) Trapezoid function.
the trapezoid weighting function gives more flexibility to set the parameters. The weighting value is set to
max equal 1 for pixel value of Contrast media
5.3.2 The Motion Information
The motion information is calculated by measuring the similarity between image
slices reconstructed at consecutive phases. This calculation delivers the motion
value ∆M ( Pl , k ) measured at specific phase Pl for the specific slice k .
As mentioned before, there are 2 methods that can be used for this calculation:
Mean Absolute Difference (MAD) and Correlation (COR). Results obtained from
37
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
both methods are quite similar to each other. Thus, we decide to use the
Subtract method –MAD since the technique is more robust and simpler to be
applied in the algorithm.
Using the MAD value, the motion information can be extracted by the following
formulas:
(
) (
(
)
)
∆M ( Pl , k ) = MAD ( V k Pl , u , i , V k Pl −1 , u , i ) + MAD ( V k Pl , u , i , Vk (Pl +1 , u, i ))
(5.6)
with the phase 0% ≤ Pl < 100% .
Since the heart motion is periodic, for the first phase at 0%, the similarities are
calculated between the last and the next phases, e.g., phase 99% of RR peaks
and phase 2% of RR peaks.
The same method can also directly be applied for the subset volume of specific
anatomy structure like coronary artery, using the Subset volume Sk Pl , v, j
developed from the voxel mask created before. The motion information follows
the same formula:
(
(
) (
)
(
) (
)
∆ M ( Pl , k ) = MAD ( Sk Pl , v, j , Sk Pl −1, v, j ) + MAD ( Sk Pl , v, j , Sk Pl +1, v, j )
)
(5.7)
Picture 5.6 describes the scheme of motion information extraction by comparing
image data of the same slice reconstructed from consecutive phases.
Fig 5.6 a volume data set contains the Subset voxel. Motion value is calculated
by comparing image slices between consecutive phases.
5.4 Motion curve and Motion Map
Motion curve and Motion map are the basic means for stable cardiac phase
selection [2]. Both are the graphical display of the motion value that visualize
the motion pattern of the cardiac images, and directly provides information about
the optimum phase with minimum motion.
5.4.1 Motion Curve
Motion curves are obtained by simply plot all motion values ∆M ( Pl , k ) [2] for all
slices reconstructed at each phase, in one plot figure. (for example fig 6.3)
38
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
From the motion curve, the average of the motion value for each phase overall
slices can be measured.
M mean ( Pl ) =
1
nz
nz
∑ ∆M ( P
l
, k)
(5.8)
k =0
This mean value is needed to see which cardiac phase shows the high similarity
averaged over all slices. By comparing the mean motion value M mean ( Pl ) from
all phases, the global optimum phase can be derived. This is the phase with
minimum motion value, thus cardiac phase with less motion of the heart, e.g. at
the systolic and diastolic phase of the heart.
A filter can be applied in order to reduce noise and enhance sensitivity. The filter
is simply done by replacing M mean ( Pl ) with the average of 3-point running value
in three consecutive phases.
M mean ( Pl ) =
1 1
∑ M mean ( Pl −oldi )
3 i=−1
(5.9)
A minima search then applied to define the phase, which has minimum motion
value for overall slices.
(5.10)
Pglobal =min( M mean ( Pl )), for all Pl , where 0% ≤ Pl <100% RR
The value then becomes the global stable phase. This value determines the
stable phases averaged for the entire cardiac volume.
By limiting the range of phases when doing the minima search, two general
stable phases relate to systole or diastole of cardiac cycle could also be derived.
Based on the fact that the heart typically spends about 1/3 of its time in systole
and 2/3 of its time in diastole, both stable phases are derived as follow:
Pglobal systole =min( M mean ( Pl )), for all Pl where 0%< Pl <35% RR)
(5.11)
Pglobal diastole =min( M mean ( Pl )), for all Pl where 35%< Pl <100% RR)
(5.12)
5.4.2 Motion Map
Motion maps are obtained if the motion values ∆M ( Pl , vk ) are grey-coded [2] in
the contour form. Along the horizontal axis of the map, the slice k is noted
versus the cardiac phase Pl with certain step in %RR cycle along the vertical
axis. The area with the same value will be coded with the same colour. Dark
area corresponds to phases with less motion and bright area corresponds to
phases with high motion. The Motion pattern of the heart could be evaluated by
analysing the contour of this motion map. (for example fig 6.4)
Phases with minimum motion can be determined for a specific slice. Minima
search is calculated among motion value of the specific slice for all
reconstruction phases. It gives a stable phase regarding to specific z-position of
the patient’s body in the predefined neighbourhood of the previously determined
global stable phases. The range of ±10% is used to avoid the big gap between
each step in further reconstruction.
Popt ( k ) =min( ∆M ( Pl , k )), for all Pl , where Pglobal -10%< Pl < Pglobal +10% (5.13)
39
Chapter 5. Automatic Optimum Phase Selection in Cardiac CT Imaging
5.5 R-shift vector modification
By using the CardioRecon program, modification for the delay phase is not
possible to be done for each slice, but only for each cardiac cycle, which
contains several slices. The information about gating phases used for
reconstruction is included in the R shift vector. A local phase can be realized in
cardiac reconstruction by modifying the R-shift vector and introducing a local
delay with respect to the R-peak to the related cycle. Up to now, only a global
delay has been used.
Fig 5.R Shift vector contains the gated phases used for each cycle. Up to now, only global phase used,
means R_shift (1)= R_shift (2)= R_shift (3)=global phase. Cycle-Dependant optimum phase is done by
modifying the R_shift vector, which introduces independent local delay for each cycle.
The stable phase for each slices then need to be transformed into cycledependent optimum phase. From the motion map obtained before, mean value
of several slices contained in same cycle can derived as follow:
∆M mean ( Pl , cycle) =
1
Ck
Ck
∑ ∆M ( P
l
, k ),
(5.14)
with Ck defines amount of slices contained in the related cycle.
The cycle-dependent optimum phase then derived with the minima search
between these mean values:
Popt (cycle) =min( ∆M mean ( Pl , cycle)), for all Pl , Pglobal -10%< Pl < Pglobal +10%
(5.15)
The information regarding amount of slices contained in one cardiac cycle is
gathered from the reconstruction data recorded before. One cardiac cycle might
have more slices compared to another cardiac cycle. The specific slices
contained in a cycle is derived analytically by comparing the acquisition time of
each slice and its relation to R-R time interval of ECG signal in time domain
(equation 5.1).
40
Chapter 6. Result and Analysis
6 Result and Analysis
The aim of this section is to analyze how the developed algorithm works step by
step and at the end try to validate it with several patient data. The algorithm is
developed using MATLAB® 7.0 utilize functions in image processing toolbox 4.2
[9]. Script of the written function is attached at the end of this report.
Each process is simulated separately to see the functionality of the algorithm.
Both a test data and patient data are used for this investigation.
6.1 Simulation with Test Data
First, the simulation is focused on the similarity calculation. To analyze the
functionality of similarity calculation, a test data set is created. The test dataset
consists of 10 images containing a sphere with different sizes. To simulate the
behavior of the heart motion, in temporal position 3 and 6 represent the phase of
30% and 60% RR, the circles are changing slowly within the consecutive
positions. Meanwhile, at other positions the radius of the circle changes rapidly.
Temporal Position
0
1
2
Radius (pixel)
40
50
35
3
4
30
5
40
6
20
7
25
8
30
9
45
55
Fig 6.1 Test Data, consists of 10 images contain sphere with different size
The test dataset is analyzed with the similarity calculation method introduced in
chapter 4. Both method Mean Absolute Difference (MAD) and Correlation (COR)
are applied to see how the algorithm measures the similarity between images in
consecutive positions.
Fig 6.2 Motion curve simulated using test data. Left is result for MAD, right is result for COR (blue line)
and 1-COR (black line). Both MAD and 1-COR give quite similar result
From the curve, both the MAD and COR value show quite the same result for
measuring the similarity between images. At temporal position 3, the radius of
the circle changes slowly from position before and after (35-30-40) and similarly
in temporal position 6 (20-25-30). They are represented as two minimum values
41
Chapter 6. Result and Analysis
in the motion curve. At temporal position 4, the radius of the circle changes
faster (30-40-20) which is expressed as a maximum in the motion curve.
From the simulation, it is clear that the algorithm is able to detect the change of
object size by calculating the similarity between images in consecutive phases.
Both methods are applicable, but for simplicity the MAD method is chosen in the
algorithm.
6.2 Analysis with Patient Data
Patient data are analyzed in order to demonstrate the potential of the algorithm
using clinical data. Several processes are tested separately to see the
functionality of the algorithm. Parameter settings of the algorithm are optimized.
6.2.1 Overall Motion Analysis of the Heart
The 4-D data of Volume data set with grid size of 512x512x223 voxel times 50
phases (from 0% to 100% @2%RR steps) are used, applying the mean
absolute differences calculation for the determination of the difference between
image slices. The difference value is directly related to the motion value.
The motion value averaged over all slices is plotted in one figure (fig. 6.3). The
black thick line represents the mean motion values for each specific phase
M mean ( Pl ) , which is used to determine the global Stable Phase Popt . The white
lines represents the filtered mean value using 3 points running averaging.
Analyzing this mean value by minimum search will provide the phase with
minimum motion, defined as the global stable phase. In this case, it is
determined at phase 64% RR.
Fig 6.3. Motion curve;
plot all motion values for all
slices reconstructed with all
phases. Black thick line
represents mean motion value
for each phase, and white thin
line represents mean values
after averaging. Doing the
minima search the global
stable phase can be derived.
Systolic stable phase is
reached at 26%, and diastolic
phase at 64%
By limiting the range when observing the global stable phase, two global stable
phases for end systole and end diastole period can be defined. The diastolic
stable phase is determined at 64%RR-cycle. And at 26%RR-cycle, another
cardiac phase with little motion has been determined, corresponding to end
systolic state.
42
Chapter 6. Result and Analysis
With 2 general stable phases at systole and diastole, the reconstruction with
minimum motion can be done for any state of the heart. For example, in order to
evaluate the ESV (end systolic volume) of the left ventricle -which indicates
percentage of blood ejected to whole body, reconstruction should be gated at
end systole stable phase to ensure the good quality considering reconstruction
of the image in heart’s minimum motion.
In the motion map the motion value is mapped onto a greyscale in the contour
form. Dark area corresponds to phases with less motion and bright area
corresponds to phases with high motion. The motion map shows optimum phase
with little cardiac motion at systole (26%RR-cycle) and another optimum phase
is shown at phases representing diastole (64%RR-cycle). It can be clearly seen
that the global stable phase (red line in the motion map) is obtained just before
the high motion of systolic, represented by brightest areas in the motion map. It
shows exactly the same result to what clinician did in defining the stable
reconstruction phase manually.
Fig 6.4. Motion Map; plot grayscale- contour of motion value for all slices reconstructed for all phases. Two
Red lines represent systole-diastole global stable phase, and white markers represent optimum phase
related to each z-position in predefined range.
Along the red line, white markers indicate optimum phase for every slice k within
the range of ±10% from each global phase. Furthermore, phase with minimum
motion for each slice would be useful in order to optimize the image quality
concerning a specific z-position within the heart, for example the valves or
specific location of the heart wall.
6.2.2 Analysis of Coronary Arteries Motion
One important thing in the coronary arteries motion analysis is to define a subset
voxel containing the coronary artery. Using a manual definition, a subset volume
is selected with grid size 43x43x102. The region of interest is determined so that
43
Chapter 6. Result and Analysis
it is wide enough to capture all motion information about the coronary arteries
concerned, in this case the RCA (Right Coronary Artery). Axial image slices
are reconstructed at normal gating phase 60%RR and used for the subset
definition.
The scheme below describes the workflow of Subset Voxel definition.
Fig 6.5. Defining a subset voxel of RCA, (a) axial slice with improved resolution contains coronary artery part (b)
centre of the subset manually selected (c) region of interest is grown that is wide enough to capture the motion of
the arteries (d) histogram weighting vector to weight the pixel value, here the trapezoid function is used
(e) Weighted subset voxel – which will be used in motion information extraction.
Simulation on Manual and Semi auto Subset definition
Both methods can be applied in defining the subset volume. The benefit of using
the semi auto method is the possibility to reduce the interference from the user
in defining the radius of the subset area. And it is also possible to re-define the
centre of the coronary arteries right into the middle point of the subset slices.
Meanwhile, using the manual method, the centre and size of subset can be
wrong, affected by the human error due to the inaccuracy of the user in defining
the centre point.
Fig 6.6. Defining subset voxels containing the RCA, (A) Manual Definition of Subset, rad=71 pixel. (B)
Semi Auto definition of Subset, rad = 67 pixel. With region growing and re-defining centre process, the
coronary part lies exactly in the middle of the subset slice.
44
Chapter 6. Result and Analysis
From the simulation, both methods produce quite the same area of subset
slices. But of course with additional region growing and centre re-defining
process, the semi auto definition requires more computational effort compare to
the manual definition. And it is also considered as a time consuming process in
the algorithm.
Application on Histogram weighting vector
Subset volume need to be weighted with certain histogram weighting vector in
order to emphasize the difference calculation only for the arteries which contain
contrast agent and eliminate motion that is influenced from other structure.
Using the trapezoid function, more flexibility gained in designing the weighting
vector. Here maximum value set to intensity 1250 – 1350 (HU 250 to 350) and
slightly reduced to zero at the intensity 1200 and 1400. This parameter is
acquired with trial and error process in order to get the subset slice containing
only important pixel value (the contrast agent in Coronary artery).
Fig 6.7 Simulation using several histograms weighting function, (a) with Gaussian function centre=1300, (b)
with trapezoid: 1000-1150-1350-1600, (c) with trapezoid: 1200-1250-1350-1400 –trapezoid function is used
as the weighting vector in the algorithm, the weighted subset now contains only the coronary parts pixel
value.
The similarity calculation is later applied to the weighted subset voxel of the
coronary arteries. Only the motion of the coronary arteries part now has impact
on the difference in image pixels. Extracting the motion value of this subset
volume would give more reliable information about the motion pattern of the
coronary artery.
Modification of the R-shift vector
The same technique using the motion curve and the motion map is applied to
find the optimum phase based on the subset voxel. Global stable phase, and
slice dependant phase can be derived from these 2 plots as the same way like
the heart overall motion analysis. The cycle-dependent optimum phase is
derived from the motion value for all slices containing the related cycle.
This local delay is introduced in the reconstruction by modifying the R-shift
vector. Here, a simulation is conducted to check whether the R shift modification
in the reconstruction works properly or not. By manually modify the R-Shift
vector in the reconstruction, the image is observed too see the change of each
segment that is reconstructed in different cycle with different local delay.
45
Chapter 6. Result and Analysis
Fig 6.8 Simulation by locally changing the phase
of one cycle and observe the segment affected
on the MPR. Relation between segments
reconstructed in a cycle is shown in the below
figure.
Upper left is normal reconstruction use global
phase; upper right is reconstructed with
modification at cycle 9, lower left at cycle 10 and
lower right at cycle 11.
Several reconstructions are made by introducing local delay only for a certain
cycle. By comparing the image with the global-phase reconstruction, it is seen
that the modification takes place only on a segment image related to the cycle
phase that has been modified. This simulation proves that the R shift vector,
which is modified by the algorithm, works properly in the reconstruction.
6.3 Validation with Patient Data
In this section, results for cardiac patient data set are presented. The purpose of
the validation is to analyze motion pattern of the coronary artery and to get the
local phase, which the coronary artery can be reconstructed with, segment by
segment in its minimum motion. Systole and diastole state is no longer important
since the motion of the coronary artery has its own characteristic and
independent to the motion of the overall heart. Thus, only one global phase is
derived
Three patient data sets are used for the validation purpose. The projection data
were acquired using Siemens Sensation 16 with parallel ECG recording and Rpeak detection. The patient data is obtained from University of Tübingen, with
scan parameter [10] described in next table.
Table 1. Scan and Reconstruction Parameters
CT system
Sensation 16
Scan Mode
Spiral
Collimation
16 x 0.75 mm
Pitch
4
Rotation Time
0.375 s
Tube Setting
120kV/433mAs
Kernel
Soft B30f
Version
VA40
Contrast Medium
Yes
For each patient, the cycle-dependant optimum phase is applied. New
reconstruction is made applying the local delay for each cycle. The result is
compared with the reconstruction using conventional technique to see the
improvement have been made by the algorithm.
46
Chapter 6. Result and Analysis
6.3.1 Result for Patient 1
Table 2. Data Patient 1
Image Slice Reconstruction
Field of View
181x181 mm2
x,y centre
(9, -3)
Coverage in z-dir
141.6 mm
Reconstruction
Slice 1mm increment 0.6 mm
Volume grid size
512x512x237
Subset Volume grid size
43x43x102
Phase step
50 steps (@2%)
Sex, Age
Mean heart rate
Maximum heart rate
Minimum heart rate
Patient Data
Male, 66 yrs
58.6 bpm
60 bpm
56.6 bpm
The algorithm is implemented to find the global and local optimum gating phase
automatically. The motion value is calculated using Mean Absolute Difference
and plot in the Motion Curve and Motion Map.
Automatic Global phase is
derived from the motion
curve at 56% RR.
Analyzing the motion map, it
is clear that the global
phase lies in the darker area
40%-70%
indicates
the
phase with minimum motion.
Cycle to cycle local phases
are derived within the range
10% in motion map. The
maximum local delay is 60%
and the minimum is 52% RR
The cycle-dependant local
phase is implemented by
changing the R shift vector.
Here 9 cycles are affected
and used as the local delay
in the reconstruction
Fig 6.9. Motion curve and Motion map of right coronary artery for patient1.
The R-Sift Modification is plot at the right figure.
47
Chapter 6. Result and Analysis
New reconstructions are made using the automatic global stable phases 56%
and using cycle-dependent optimum local phase proposed from the algorithm. In
order to compare the result, coronal slices were reconstructed at every 10%RR.
Multi Planar Reconstruction (MPR) from each phase reconstruction are then
compared.
Fig 6.10 Comparing result for patient 1. MPR
images reconstructed at every 10%phase for
comparison. Upper right image reconstructed
with automatic global stable phase (56%), lower
right using the cycle-dependent optimum phase.
Images produced with the phase proposed by
the algorithm have better quality and less motion
artifacts.
The upper right figure is reconstructed with a global stable phases which is automatically
determined at 56%. The lower right image has been reconstructed using cycle–
dependent local phase. Reconstructions made for each 10% RR phase are shown in the
left columns.
48
Chapter 6. Result and Analysis
6.3.2 Result for Patient 2
Table 3. Data Patient 2
Image Slice Reconstruction
2
Field of View
130x130 mm
x,y centre
(25, 15)
Coverage in z-dir
134.4 mm
Reconstruction
Slice 1mm increment 0.6 mm
Volume grid size
512x512x225
Subset Volume grid size
55x55x74
Phase step
50 steps (@2%)
Sex, Age
Mean heart rate
Maximum heart rate
Minimum heart rate
Patient Data
Female, 70 yrs
63.981 bpm
102 bpm
45.28 bpm
The algorithm is implemented to find the global and local optimum gating phase
automatically. The motion value is calculated using Mean Absolute Difference
and plot in the Motion Curve and Motion Map.
Automatic Global phase is
derived from the motion
curve at 66% RR.
Analyzing the motion map, it
is clear that the global
phase lies in the darker area
indicates the phase with
minimum motion.
Cycle to cycle local phases
are derived within the range
10% in motion map. The
maximum local delay is 68%
and the minimum is 60% RR
The cycle-dependant local
phase is implemented by
changing the R shift vector.
Here 8 cycles are affected
and used as the local delay
in the reconstruction
Fig 6.11 Motion curve and Motion map of right coronary artery for patient2.
The R-Sift Modification is plot at the right figure.
49
Chapter 6. Result and Analysis
New reconstructions are made using the automatic global stable phases 66%
and using cycle-dependent optimum local phase proposed from the algorithm. In
order to compare the result, coronal slices were reconstructed at every 10%RR.
Multi Planar Reconstruction (MPR) from each phase reconstruction are then
compared.
Fig 6.12 Comparing result for patient 2. MPR images
reconstructed at every 10%phase for comparison.
Upper right image reconstructed with automatic global
stable phase (66%), lower right using the cycledependent optimum phase.
Images produced with the phase proposed by the
algorithm have better quality and less motion artifacts.
The upper right figure is reconstructed with a global stable phases which is automatically
determined at 66%. The lower right image has been reconstructed using cycle–
dependent local phase. Reconstructions made for each 10% RR phase are shown in the
left columns.
50
Chapter 6. Result and Analysis
6.3.3 Result for Patient 3
Table 4. Data Patient 3
Image Slice Reconstruction
2
Field of View
146x146 mm
x,y centre
(24,7)
Coverage in z-dir
117 mm
Reconstruction
Slice 1mm increment 0.6 mm
Volume grid size
512x512x196
Subset Volume grid size
75x75x105
Phase step
50 steps (@2%)
Sex, Age
Mean heart rate
Maximum heart rate
Minimum heart rate
Patient Data
Male, 81
60 bpm
63.62 bpm
58.02 bpm
The algorithm is implemented to find the global and local optimum gating phase
automatically. The motion value is calculated using Mean Absolute Difference
and plot in the Motion Curve and Motion Map.
Automatic Global phase is
derived from the motion
curve at 54% RR.
Analyzing the motion map, it
is clear that the global phase
lies in the darker area 50%60% indicates the phase
with minimum motion.
Cycle to cycle local phases
are derived within the range
10% in motion map. The
maximum local delay is 58%
and the minimum is 50% RR
The cycle-dependant local
phase is implemented by
changing the R shift vector.
Here 8 cycles are affected
and used as the local delay
in the reconstruction
Fig 6.13. Motion curve and Motion map of right coronary arteries for patient3.
The R-Sift Modification is plot at the right figure.
51
Chapter 6. Result and Analysis
New reconstructions are made using the automatic global stable phases 54%
and using cycle-dependent optimum local phase proposed from the algorithm. In
order to compare the result, coronal slices were reconstructed at every 10%RR.
Multi Planar Reconstruction (MPR) from each phase reconstruction are then
compared.
Fig 6.14 Comparing result for patient 3. MPR
images reconstructed at every 10%phase for
comparison. Upper right image reconstructed
with automatic global stable phase (54%), lower
right using the cycle-dependent optimum phase.
Images produced with the phase proposed by
the algorithm have better quality and less motion
artifacts.
The upper right figure is reconstructed with a global stable phases which is automatically
determined at 54%. The lower right image has been reconstructed using cycle–
dependent local phase. Reconstructions made for each 10% RR phase are shown in the
left columns.
52
Chapter 6. Result and Analysis
6.4 Analysis of The Result
The algorithm works properly for each patient data. Applying the mean absolute
difference to calculate the motion value, the algorithm is able to deliver the
motion curve and motion map, providing information about the motion pattern of
the coronary arteries.
Global cardiac phase with little motion is derived from the motion curve. All
motion values for all subset slices containing the coronary artery is plot. The
thick black line represents the mean value of each phase, which is used to
determine the global phase automatically.
In the motion map the motion value is mapped onto a greyscale. The global
phase from all patients is plotted exactly within the dark area, which corresponds
to the phase with minimum motion. Corresponding cardiac phase with little
motion for each reconstruction cycle can be derived, plotted as blue line.
6.4.1 Comparing the result
There are 3 criteria of good image quality in CT angiography for defining the
coronary artery [10]:
1. Absence of motion artifacts
2. High contrast in Coronary arteries
3. High spatial resolution
Here, results from validation of the algorithm are compared to see the benefit of
the algorithm.
In case Patient1, global phase is automatically defined at 56% RR based on the
motion curve. In the motion map, it is clearly seen that the artery has quite
stable motion between phase 40%-70% RR (fig 6.9). The set of MPR image (fig.
6.10) reflects the motion pattern. Images reconstructed at 50% and 60% have a
better quality in defining the coronary arteries. Meanwhile, images reconstructed
at other phases show coronary with high motion artifacts. Image reconstructed
at 80% for instance doesn’t even define clear part of the artery. This phase has
a quite high motion value, and manifest as the bright area in the map. The
motion curve and motion map exactly explains the motion pattern.
Image reconstructed at automatic global phase demonstrates the same level
detail of coronary arteries. The same thing happens when using the cycledependent phase. Nine (9) cycles of reconstruction are gated with local delay,
which is able to reduce the motion artifacts.
From the motion curve of Patient 2, the global phase is determined
automatically at 66% (fig6.11). The motion pattern of coronary artery for patient
2 is quite irregular and totally different compared to the motion pattern of the
heart. It could be affected by the high variability in the recorded ECG signal (45
bpm–102 bpm). It proves the fact that motion pattern of the coronary arteries
does not exactly follow heart motion pattern. Nevertheless, it shows the benefits
of the algorithm in defining the optimum phase independent from the patient-topatient and cycle-to-cycle variability
53
Chapter 6. Result and Analysis
Most of the MPR images (fig. 6.12) are blurred and show severe streak artifacts,
explained by the motion map where a large portion shown as bright area
corresponding to high motion. Image reconstructed at automatic global phase
defines the coronary arteries better. The artery is clearly shown with reasonable
contrast. Using the cycle-dependent phase, reconstructed image shows
enhancement in reducing the artifacts. Each segment is gated with different
local delay and guarantee that the reconstruction is always done at the phase
with minimum motion. The result shows clearly the benefit of cycle-dependant
phase in optimizing the image quality.
For patient 3, the same approach is applied to define the global phase
automatically from motion curve (fig. 6.13). The global phase is set at 54%,
which is plotted in the darker area within the motion map. It shows the
correlation between the two maps in providing information about motion pattern
of the coronary.
Analyzing the MPR image sets (fig.6.14), image reconstructed at phase 30%40%, corresponds to the phase with maximum motion, and is not able to show
clear arteries due to high motion artifacts. A better image quality is achieved at
phase 50%-60%, which manifests in the darker areas of motion map;
corresponding to the phase with minimum motion of the heart. Image
reconstructed with automatic global phase also demonstrate the same level of
detail with high contrast of the artery part. Again, using the cycle-dependent
phase, reconstructed image with high contrast coronary artery is shown in better
continuity and with less motion artifacts.
6.4.2 Step Artifacts Analysis
Reconstruction at optimum phase proposed by the algorithm produces better
image of the coronary arteries, but still have problem in Step artifacts. The
algorithm compares the same single-slice from consecutive phases, and
concerns only to one specific segment slice by slice, but not the continuity from
segment to segment. The discontinuity along the coronary artery part, which
manifests as step artifacts, then could not be solved with the cycle-dependent
optimum phase.
Further simulation has been performed in order to explain this problem. Manual
adjustment of the optimum phase for the segment with step artifacts was
performed. The analysis is done in the framework of R-shift vector modification.
In order to analyze optimum phase at the step segment, the gating phase for the
cycle related to the area where the step artifact exists is changed manually.
Several phases with minimum motion value gathered form the motion map,
between 50%-60%RR is used (fig 6.15). The images are compared to see which
reconstruction phase is able to eliminate the step artifacts.
54
Chapter 6. Result and Analysis
Fig 6.15. Coronal slices reconstructed at global stable phase, only one segment that causes step artifact
is reconstructed with different local phase, between 50%-60%RR.
It is shown that no matter what phase used to reconstruct the step segment, the
artifact always exists. The algorithm is not sufficient to totally eliminate step
artifacts. The Motion map indicates when the heart is in its minimum motion, but
never guarantees that the heart always is in the same geometry position cycle to
cycle, even if the heart always reaches its minimum motion. It is the reason why
the step artifacts always exists in the image reconstructed with the local phase.
Basically the problem that the heart does not reach the same geometrical
position in consecutive cycle cannot be overcome by phase adjustment.
Actually, image registration algorithms are needed to tackle this kind of image
artifacts.
55
Bibliography
7 Discussion and Conclusion
7.1 Discussion
Using projection data from retrospectively gated cardiac CT scan, including all
slices from a multitude of cardiac phases, volumes of the heart are
reconstructed in several consecutives phase points. From this 4D volume, the
motion information is extracted with a simple similarity calculation based on the
difference in the pixel value of the axial images. The motion value then
calculated according to each z-position of the reconstructed volume, which can
be visualized with so-called motion curve and motion map.
Overall the algorithm works properly and delivers optimum phase for the
reconstruction. The algorithm successfully maps the motion pattern of the heart,
or small detail part like coronary arteries and derives automatically an optimal
stable phase, globally and locally.
The motion map for heart -overall motion analysis shows heart in all of its states,
defining the systolic and diastolic phase. These two global stable phases are
used to reconstruct the heart in related phase. Stable phase for each z-position
could also be derived from the map. This is useful when a segment part of the
heart needed to be evaluated specifically.
Analyzing the coronary arteries with motion map could provide optimum phase
for image reconstruction. Reconstruction with the cycle-dependent stable phase
introducing the local delay will be useful for evaluating segment-to-segment and
reducing blurred object.
Volume sets of MPR images have been compared, showing the coronary
arteries reflect the information obtained from the motion map: Images
reconstructed with phases during maximum motion, appear blurry and show
severe streak artifacts. The RCA is not shown perfectly and strong distortion
happen due to motion artifacts. Analyzing the images reconstructed at phases
during minimum motion, the coronary artery is better defined with less blurring.
Information from the motion map is helpful in extracting the motion pattern and
selects gating phase that should be used in order to get images with good
quality in an automatic way.
The image reconstructed at the automatic global phase demonstrates the same
level of detail, making clear the benefit of the automatic technique. From the
new reconstructed images, an improvement in terms of minimum blurring and
less motion artifact is better achieved. The reconstructions using cycledependent phase also improve the image quality at the edge of image stacks.
Artifacts are minimized in the image reconstructed with local phase delay. High
contrast coronary artery is shown in good continuity and with less motion
artifacts. The improvement in the image quality demonstrates the effectiveness
and usefulness of the automatic method proposed.
An important thing to be considered in the use of the method is its limitation to
preserve perfectly segment continuity of the coronary arteries. The existence of
the step artifacts using all manually defined phases clearly defines this limitation.
56
Bibliography
No local phase optimization could be found to well align the corresponding
segment. This observation is an indication that the heart does not return to
exactly the geometrical same position in consecutives cycles. However this is
the basic precondition for the motion map algorithm to work properly. The
method is only able to detect the motion pattern of the heart and provides the
stable phase when the heart is in its minimum movement. Therefore, the
physiological misbehaviour cannot be overcome easily with the proposed
method.
Here only three patient data used because of the time consuming semiautomatic definition of subset voxel. For a meaningful clinical validation, a
clinical study on large patient database is needed. For this purpose, an
automated definition of subset voxels is needed.
The thesis doesn’t cover the analysis of software performance of the method.
But with the algorithm, the automatic and patient-specific selection of stable
cardiac phase is performed with simple image based technique, thus perform
very high computational efficiency. The presented approach is very efficient
since low-resolution data sets are used in combination with the simple similarity
measurements. For the manual determination of the stable cardiac phase,
several high-resolution data sets must be reconstructed, which is inefficient and
time-consuming.
One important remark is, that the field of application of ‘Motion Map Technique’
is reasonable only for CT scanner with a few detector slices, where the cycle-bycycle coverage is only a small portion of the entire heart volume. For detectors
with large detector size (e.g.64x0.6 mm) the relevant parts of coronary arteries
are covered within only 2-3 cardiac cycles; hence potential stair-step artifacts at
the edges of image stack boundaries are restricted to only 2-3 coronary
segments. Implementing the algorithm for larger detector slice will cost improper
effort and the benefit is not clear.
7.2 Conclusion
The algorithm is able to optimize cardiac image reconstruction by automatically
defining the phase of the heart independently from patient-patient and cyclecycle variability. Not only a global phase delay has been used, but the optimum
cycle-dependent local phase is also introduced.
The method successfully shows motion pattern of the heart, and delivers the
systole-diastole phase directly from a motion map. For specific structure like
coronary arteries, a subset voxel containing mainly the coronary arteries is
created to expand the functionality of the algorithm. Additional region growing
technique and histogram HU weighting function is also used in order to focus the
motion analysis to the selected vessel structure.
The optimum local phase is determined for each cycle by analysing the motion
value of every slice reconstructed in related cycle. Instead of using global phase,
with this cycle-dependent phase determination, local delay with respect to the Rpeak is set independently from one cycle to the next cycle. This local phase can
be realized later in the cardiac reconstruction.
57
Bibliography
Images produced with the proposed optimum phase have better quality. The
coronary artery is shown with high contrast and in good continuity with reduced
motion artifacts. Nevertheless, its limitation to eliminate the step artifact is one
topic for further research and future work.
7.3 Future Work
Further development of this algorithm is absolutely needed to improve the
effectiveness and efficiency. In principle the method allows for a slice-by-slice
local phase selection, based on the motion map created. It has to be worked out
whether this approach has advantages compared to the cycle-by-cycle phase
determination already developed.
The presented analysis also shows that the algorithm has limitation in reducing
the step artifacts between segments in reconstructed images. It has to be
investigated in which way the reconstruction can preserve segment continuity for
the coronary arteries. Further technique with more complex algorithm, which
allows the exact tracking of the arteries, such as morphological structure-based
or image registration algorithm might be able to solve this problem.
58
Bibliography
Bibliography
[1]
B. M. Ohnesorge, C. R. Becker, T. G. Flohr, M. F. Reiser, “Multi-slice
CT in Cardiac Imaging: Technical Principles, Clinical Application and
Future Developments”, Springer, 2002
[2]
R.Manzke, M.Grass, T.Nielsen and Th.Köhler, “Automatic Phase
Determination for Retrospectively Gated Cardiac CT” in Proceedings
Medical Physics, Vol.31, No.12, December 2004
[3]
Emilie Maguet, “Heart Motion Detection Using Complementary
Projection”, Siemens Medical Forchheim, 2002
[4]
Texas Heart Institute website, “Anatomy of the Heart”
http://www.tmc.edu/thi/anatomy2.html
[5]
Prof. Dr. Dieter
Karlsruhe, 2003.
[6]
University of Utah Health Sciences Center website, “Heart Phase”
http://medlib.med.utah.edu/
[7]
W.A. Kalender, “Computed Tomography: Fundamentals, System
Technology, Image Quality, Applications”, Springer 2000
[8]
Prof. Dr. Dieter Höpfel, “Imaging
Fachhochschule Karlsruhe, 2003.
[9]
MATLAB Help Files, Release 14, 2004.
Höpfel,
“Medical
Sensorics”,
Systems
Fachhochschule
in
Medicine”,
[10] R. Brüning, T. Flohr, “Protocols for Multislice CT, 4- and 16–row
application”, Springer, 2003.
[11] David. A Dowe, B. Handel, M. Katz, “Coronary CT Scan”, Diagnostic
Imaging, April 2003
[12] V. Rasche, B. Movassaghi, M. Grass, “ Automatic gating window
selection for gated three-dimensional coronary X-ray angiography”, in
Proceedings International Congress Series – 1268, 2004.
[13] Hirofumi Anno, M.D, “Multi-slice CT Coronary Angiography, The Impact
of 32 Slice” Toshiba Medical System, September 2004
[14] Training CD, ”Coronary CTA-Tutor and Advisor”, Siemens Medical
2005
[15] Training CD, ”Diagnostic Imaging Workshop”, Siemens Medical 2005
[16] Siemens intranet portal
59
Appendix A: Matlab Function
Appendix A : Matlab Function
The program is written with MATLAB® 7.0 utilize functions in image processing
toolbox 4.2.
Built-in function
Several built-in functions are used in the program:
- Dicomread: reads the image data from the compliant Digital Imaging
and Communications in Medicine (DICOM) file
- Imagesc: scales image data to the full range of the current colormap and
displays the image.
Written Function
A.1
COMMON FUNCTION...........................................................................60
A.1.1
User interface ............................................................................60
A.1.2
Similarity Calculation................................................................61
A.1.3
Weighting Function ...................................................................61
A.2
FUNCTION FOR HEART- OVERALL MOTION ANALYSIS ..........................62
A.2.1
Create motion matrix .................................................................62
A.2.2
Motion Curve and Motion Map, Selection of optimum Phase .....63
A.3
FUNCTION FOR CORONARY ARTERIES MOTION ANALYSIS ....................64
A.3.1
Create Subset Voxel Growing -manual ......................................64
A.3.2
Create Subset Voxel– Semi auto.................................................64
A.3.2.1 Region Growing.....................................................................65
A.3.2.2 Check Neighbourhood ...........................................................66
A.3.3
Create motion matrix .................................................................66
A.3.4
Motion Curve and Motion Map – Selection of optimum Phase ...67
A.3.4.1 R-Shift Modification..............................................................68
7.4 Common Function
7.4.1
User interface
%-------------------------------------------------------------------------%Program: main.m
%User Interface Program
%
%created by.Fahmi, Feb 05
%-------------------------------------------------------------------------uiimport
disp(':::load data reconstruction----press enter when you are finish');
pause
patnama=input(':::Patient Name = ','s');
global data;
global datindex_Rpeak_image;
global patnama;
disp(':::select data set directory --folder contain ALL phases');
imagedir=uigetdir;
step=input(':::Set Phase resolution @2% or @5%=');
global step;
global imagedir;
disp(':::choose Analysis Mode, 1=Whole Cardiac or 2=CAD Analysis');
analysis_mode=input(':::input for analysis mode : ');
60
Appendix A: Matlab Function
if analysis_mode==1
disp(':::Motion map for whole cardiac image');
motionmatrix=create_gen_motionmatrix();
[sys,dias,optphase1,optphase2]=motmap_gen(motionmatrix);
[filename pathname]=uiputfile('*.mat');
savedir=strcat(pathname,filename);save(savedir,'motionmatrix','sys','dias','optph
ase1','optphase2');
elseif analysis_mode==2
disp(':::Motion map for CAD Analysis');
disp(':::choose voxel growing type 1=manual or 2=semi auto');
vox_grow_type=input('Input for voxel growing type : ');
if vox_grow_type==1
disp(':::Manual definition subset voxel');
voxel_mask=manualdef();
elseif vox_grow_type==2
disp(':::Semi Auto definition subset voxel');
voxel_mask=semiautodef();
end
motionmatrix=create_motionmatrix(voxel_mask);
disp(':::choose Phase Optimizing method type 1=by slices or 2=by cycles');
phmet_type=input('Input for Phase Optimized method type : ');
if phmet_type==1
[gen_optphase,optphase_cad]=motmap_CAD_slice(motionmatrix);
[filename pathname]=uiputfile;
savedir=strcat(pathname,filename);save(savedir,'optphase_cad','motionmatrix','vox
el_mask');
elseif phmet_type==2
[gen_optphase,R_shift_vector]=motmap_CAD_cycle(motionmatrix)
[filename pathname]=uiputfile;
savedir=strcat(pathname,filename);save(savedir,'R_shift_vector','motionmatrix','v
oxel_mask');
end
end
7.4.2 Similarity Calculation
%-------------------------------------------------------------------------%Program: similarity.m
%Calculate the similarity based on Mean Absolute Difference (MAD)
%between 2 data image and reference image
%
%created by.Fahmi, Dec 04
%-------------------------------------------------------------------------function Cval=similarity(A,B,Ref)
[Cy,Cx]=size(A);
Cval=0;
for i=1:Cy
for j=1:Cx
temp=abs(A(i,j)-Ref(i,j))+abs(B(i,j)-Ref(i,j));
Cval=Cval+temp;
end
end
Cval=Cval/(Cx*Cy);
7.4.3 Weighting Function
%-------------------------------------------------------------------------%Program: weighte_trap.m
%Create a trapezoid weighting vector
%
%created by.Fahmi, Jan 05
%-------------------------------------------------------------------------function Wn=weighte_trap(A,B,C,D,maxvalue)
Wn=zeros(1,5000);
%Maximal value
Wn(1,B:C)=maxvalue;
%Left Slope
range1=B-A;
61
Appendix A: Matlab Function
for i=0:range1
Wn(1,A+i)=(maxvalue/range1)*i;
end
%Right Slope
range2=D-C;
for i=0:range2
Wn(1,C+i)=maxvalue-((maxvalue/range2)*i);
end
7.5 Function for Heart- overall motion Analysis
7.5.1 Create motion matrix
%-------------------------------------------------------------------------%Program: create_gen_motionmatrix.m
%Create a matrix of motion value for overall heart motion analysis
%
%created by.Fahmi, Dec 04
%-------------------------------------------------------------------------function y = create_gen_motionmatrix()
global
global
global
global
imagedir;
step;
data;
patnama;
foldernama1=strcat(patnama,'.CT_toS_');
foldernama2='perc_ot_lin';
filenama1=strcat('_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_y',
int2str(data.centery),'_',data.kernel,'_sw1_');
filenama2='.ima.dcm';
Nphase=100/step;
nSlices=input('how many slices');
for k=1:nSlices
l=sprintf('%03d',k);
disp('Analyzing slice phase by phase');k
for p=1:Nphase
if (p==1)
pbefore=Nphase;pafter=2;
elseif (p==Nphase)
pbefore=Nphase-1;pafter=1;
else
pbefore=p-1;pafter=p+1;
end
pbefore=int2str((pbefore-1)*step);
pafter=int2str((pafter-1)*step);
pref=int2str((p-1)*step);
folderbefore=strcat(foldernama1,pbefore,foldernama2);
folderafter=strcat(foldernama1,pafter,foldernama2);
folderRef=strcat(foldernama1,pref,foldernama2);
dicomfile_a=strcat(imagedir,'\',folderbefore,'\',folderb,filenama1,l,filenama2);
dicomfile_b=strcat(imagedir,'\',folderafter,'\',foldera,filenama1,l,filenama2);
dicomfile_Ref=strcat(imagedir,'\',folderRef,'\',folderRef,filenama1,l,filenama2);
At=double(dicomread(dicomfile_a));
Bt=double(dicomread(dicomfile_b));
Reft=double(dicomread(dicomfile_Ref));
y(p,k)=similarity(At,Bt,Reft);
end
end
62
Appendix A: Matlab Function
7.5.2 Motion Curve and Motion Map, Selection of optimum Phase
%-------------------------------------------------------------------------%Program: motmap_gen.m
%Create Motion Curve and Motion Map for overall heart motion analysis,
%including the global stable phase selection, systole and diastole and
%slice-dependant optimum phase
%
%created by.Fahmi, Dec 05
%-------------------------------------------------------------------------function[sys,dias,minpos1,minpos2]=motmap_gen(y)
global step
[nPhase,nSlice]=size(y);
%Motion Curve
for i=1:nPhase
meanval(i)=mean(y(i,:));
end
%Filtering 3-running point averaging
for i=1:nPhase
if i==1
temp=meanval(2)+meanval(1)+meanval(nPhase);
elseif i==nPhase
temp=meanval(1)+meanval(nPhase)+meanval(nPhase-1);
else
temp=meanval(i+1)+meanval(i)+meanval(i-1);
end
meanval_phase2(i)=temp/3;
end
figure;plot(y,':');hold all
plot(meanval,'-k','LineWidth',5);
plot(meanval,'-w','LineWidth',1);hold off
grid on;axis tight;
title('Motion Curve');xlabel('Phase %R-R');ylabel('Absolute Difference');
%Motion Map
%Global Phase selection
rat=0.3333; %systole 1/3 nPhase
[dump,estmin1]=min(meanval(2:round(nPhase*rat)));
estmin1=estmin1+1;
[dump,estmin2]=min(meanval(round(nPhase*rat)+1:nPhase-1));
estmin2=estmin2+round(nPhase*rat);
sys=(estmin1-1)*step;dias=(estmin2-1)*step;
minpos1=zeros(1,nSlice);minpos2=zeros(1,nSlice);
factor=input('mapping factor : ');
%slice-dependent local phase
disp=(':::chose phase range :');
rangephase=input('phase range: ');
rangeph=floor((0.5*rangephase)/step);
for i=1:nSlice
[c1,minvalue1]=min(y(estmin1-rangeph:estmin1+rangeph,i));
minpos1(1,i)=(minvalue1+(estmin1-rangeph-1)-1)*step;
[c2,minvalue2]=min(y(estmin2-rangeph:estmin2+rangeph,i));
minpos2(1,i)=(minvalue2+(estmin2-rangeph-1)-1)*step;
end
figure;xaxis=1:nSlice;yaxis=0:step:(nPhase-1)*step;
contourf(xaxis,yaxis,y.^factor);colorbar; hold all
plot(ones(1,nSlice)*sys,'-xr','LineWidth',1);
plot(minpos1,'-xw','LineWidth',1);
plot(ones(1,nSlice)*dias,'-xr','LineWidth',1);
plot(minpos2,'-xw','LineWidth',1);hold off
title('Motion Map');xlabel('k-slice');ylabel('Phase %R-R');
63
Appendix A: Matlab Function
7.6 Function for Coronary arteries motion Analysis
7.6.1 Create Subset Voxel Growing -manual
%-------------------------------------------------------------------------%Program: manualdef.m
%Create Subset Voxel manually
%
%created by.Fahmi,Jan 05
%-------------------------------------------------------------------------function [voxel_mask]=manualdef()
global imagedir;
global patnama;
global data;
phase=60;phase=int2str(phase);
k=120;l=sprintf('%03d',k);
datapat=strcat(imagedir,'\',patnama,'.CT_toS_',phase,'perc_ot_lin\',patnama,'.CT_
toS_',phase,'perc_ot_lin_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_
y',int2str(data.centery),'_',data.kernel,'_sw1_',l,'.ima.dcm');
a=dicomread(datapat);figure;imagesc(a);title(l);colormap gray;
disp('Voxel Mask will be created using phase 60%RR started from slices 120');
disp('Please select the center and radius from each slices with left button');
disp('End the series by clicking right mouse');
[x,y,button]=ginput(2);
voxel_mask(k,1)=round(x(1));
voxel_mask(k,2)=round(y(1));
voxel_mask(k,3)=round(max(abs(x(1)-x(2)),abs(y(1)-y(2))));
buttonchosen=button;kchosen=k;
while button~=3
k=k+1;l=sprintf('%03d',k);
datapat=strcat(imagedir,'\',patnama,'.CT_toS_',phase,'perc_ot_lin\',patnama,'.CT_
toS_',phase,'perc_ot_lin_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_
y',int2str(data.centery),'_',data.kernel,'_sw1_',l,'.ima.dcm');
a=dicomread(datapat);imagesc(a);title(l);colormap gray;
[x,y,button]=ginput(2);
if (button~=3)
voxel_mask(k,1)=round(x(1));
voxel_mask(k,2)=round(y(1));
voxel_mask(k,3)=round(max(abs(x(1)-x(2)),abs(y(1)-y(2))));
end
end
button=buttonchosen;k=kchosen;
while button~=3
k=k-1;l=sprintf('%03d',k);
datapat=strcat(imagedir,'\',patnama,'.CT_toS_',phase,'perc_ot_lin\',patnama,'.CT_
toS_',phase,'perc_ot_lin_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_
y',int2str(data.centery),'_',data.kernel,'_sw1_',l,'.ima.dcm');
a=dicomread(datapat);imagesc(a);title(l);colormap gray;
[x,y,button]=ginput(2);
if (button~=3)
voxel_mask(k,1)=round(x(1));
voxel_mask(k,2)=round(y(1));
voxel_mask(k,3)=round(max(abs(x(1)-x(2)),abs(y(1)-y(2))));
end
end
7.6.2 Create Subset Voxel– Semi auto
%-------------------------------------------------------------------------%Program: semiautodef.m
%Create Subset Voxel semi automatically
%
%created by.Fahmi, Feb 05
%-------------------------------------------------------------------------function [voxel_mask]=semiautodef()
64
Appendix A: Matlab Function
global imagedir;
global patnama;
global data;
%Create seed Points
phase=60;phase=int2str(phase);
k=120;l=sprintf('%03d',k);
datapat=strcat(imagedir,'\',patnama,'.CT_toS_',phase,'perc_ot_lin\',patnama,'.CT_
toS_',phase,'perc_ot_lin_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_
y',int2str(data.centery),'_',data.kernel,'_sw1_',l,'.ima.dcm');
disp('Voxel Mask will be created from phase 60%RR started from slices 120');
disp('Please select the center from each slices with left button');
disp('End the series by clicking right mouse');
a=dicomread(datapat);figure;imagesc(a);title(l);colormap gray;
[x,y,button]=ginput(1);y=round(y);x=round(x);refval=a(y,x);
seed(k,1)=x;seed(k,2)=y;seed(k,3)=refval;
buttonchosen=button;kchosen=k;
while button~=3
k=k+1;
l=sprintf('%03d',k);
datapat=strcat(imagedir,'\',patnama,'.CT_toS_',phase,'perc_ot_lin\',patnama,'.CT_
toS_',phase,'perc_ot_lin_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_
y',int2str(data.centery),'_',data.kernel,'_sw1_',l,'.ima.dcm');
a=dicomread(datapat);imagesc(a);title(l);colormap gray;
[x,y,button]=ginput(1);y=round(y);x=round(x);refval=a(y,x);
if (button~=3)
seed(k,1)=x;seed(k,2)=y;seed(k,3)=refval;
end
end
button=buttonchosen;k=kchosen;
while button~=3
k=k-1;
l=sprintf('%03d',k);
datapat=strcat(imagedir,'\',patnama,'.CT_toS_',phase,'perc_ot_lin\',patnama,'.CT_
toS_',phase,'perc_ot_lin_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_
y',int2str(data.centery),'_',data.kernel,'_sw1_',l,'.ima.dcm');
a=dicomread(datapat);imagesc(a);title(l);colormap gray;
[x,y,button]=ginput(1);y=round(y);x=round(x);refval=a(y,x);
if (button~=3)
seed(k,1)=x;seed(k,2)=y;seed(k,3)=refval;
end
end
disp('Please wait.. Calculating the ROI ..');
%Region Growing and Create voxel_mask
[s,dump]=find(seed,1);
for i=s:size(seed,1)
l=sprintf('%03d',i);
datapat=strcat(imagedir,'\',patnama,'.CT_toS_',phase,'perc_ot_lin\',patnama,'.CT_
toS_',phase,'perc_ot_lin_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_
y',int2str(data.centery),'_',data.kernel,'_sw1_',l,'.ima.dcm');
a=dicomread(datapat);
[ycentre,xcentre,rad]=reggrow(a,seed(i,2),seed(i,1),seed(i,3));
voxel_mask(i,1)=xcentre;voxel_mask(i,2)=ycentre;voxel_mask(i,3)=rad;
end
7.6.2.1 Region Growing
%-------------------------------------------------------------------------%Program: reggrow.m
%Program for Region Growing - Iteration
%
%created by.Fahmi, Feb 05
%-------------------------------------------------------------------------function [ycentre,xcentre,rad]=reggrow(a,y,x,refval)
mask=zeros(size(a,1),size(a,2));
65
Appendix A: Matlab Function
%scanned,member,being centre(3),
%scanned,member,not yet being centre(2),
%scanned,non member(1),
%not yet scanned(0)
mask(y,x)=2;
yseed=y;xseed=x;
while (abs(yseed-y)<25 |abs(xseed-x)<40)
[mask]=seengbhour(a,mask,yseed,xseed,refval);
[yseed,xseed]=find(mask==2,1);
end
[i,j]=find(mask==3);
radx=max(j)-min(j);rady=max(i)-min(i);rad=round(max(radx,rady)/2);
ycentre=round(mean(i));xcentre=round(mean(j));
7.6.2.2 Check Neighbourhood
%-------------------------------------------------------------------------%Program: seenghbour.m
%Program to check pixel around the seed point
%
%created by.Fahmi, Feb 05
%-------------------------------------------------------------------------function [mask] =seengbhour(a,mask,yi,xj,refval)
mask(yi,xj)=3; %now being a centre
for i=-1:1
for j=-1:1
ypos=yi+i;
xpos=xj+j;
if (mask(ypos,xpos)==0 & abs(refval-a(ypos,xpos))<50)
mask(ypos,xpos)=2; %scanned, member,non centre
elseif (mask(ypos,xpos)==0 & abs(refval-a(ypos,xpos))>50)
mask(ypos,xpos)=1; %scanned,non member
end
end
end
7.6.3 Create motion matrix
%-------------------------------------------------------------------------%Program: create_motionmatrix.m
%Create a matrix of motion value for subset voxel motion analysis
%
%created by.Fahmi, Jan 05
%-------------------------------------------------------------------------function y = create_motionmatrix(voxel_mask)
global
global
global
global
imagedir;
step;
data;
patnama;
foldernama1=strcat(patnama,'.CT_toS_');
foldernama2='perc_ot_lin';
filenama1=strcat('_g_DFOV',int2str(data.DFOV),'_x',int2str(data.centerx),'_y',int
2str(data.centery),'_',data.kernel,'_sw1_');
filenama2='.ima.dcm';
rad=max(voxel_mask(:,3));
Wn=weighte_trap(1200,1250,1300,1400,1);
Nphase=100/step;
[s,dump]=find(voxel_mask,1);
for k=s:size(voxel_mask,1)
l=sprintf('%03d',k);
disp('Analyzing slice phase by phase--- please wait--- ');k
for p=1:Nphase
if (p==1)
pbefore=Nphase;pafter=2;
elseif (p==Nphase)
pbefore=Nphase-1;pafter=1;
else
pbefore=p-1;pafter=p+1;
end
66
Appendix A: Matlab Function
pbefore=int2str((pbefore-1)*step);
pafter=int2str((pafter-1)*step);
pref=int2str((p-1)*step);
folderbefore=strcat(foldernama1,pbefore,foldernama2);
folderafter=strcat(foldernama1,pafter,foldernama2);
folderRef=strcat(foldernama1,pref,foldernama2);
dicomfile_a=strcat(imagedir,'\',folderbefore,'\',folderb,filenama1,l,filenama2);
dicomfile_b=strcat(imagedir,'\',folderafter,'\',foldera,filenama1,l,filenama2);
dicomfile_Ref=strcat(imagedir,'\',folderRef,'\',folderRef,filenama1,l,filenama2);
At=double(dicomread(dicomfile_a));
Bt=double(dicomread(dicomfile_b));
Reft=double(dicomread(dicomfile_Ref));
for i=1:(2*rad)+1
for j=1:(2*rad)+1
ypos=voxel_mask(k,2)-rad+j-1;xpos=voxel_mask(k,1)-rad+i-1;
A(i,j)=At(ypos,xpos)*Wn(round(At(ypos,xpos))+1);
B(i,j)=Bt(ypos,xpos)*Wn(round(Bt(ypos,xpos))+1);
Ref(i,j)=Reft(ypos,xpos)*Wn(round(Reft(ypos,xpos))+1);
end
end
y(p,k)=similarity(A,B,Ref);
end
end
7.6.4 Motion Curve and Motion Map – Selection of optimum Phase
%-------------------------------------------------------------------------%Program: motmap_CAD_cycle.m
%Create Motion Curve and Motion Map for subset voxel motion analysis,
%including the global stable phase selection, and cycle-dependent local
%phase. Proposed R-shift vector as output
%
%created by.Fahmi, Dec 05
%-------------------------------------------------------------------------function[gen_optphase,R_shift_vector]=motmap_CAD_cycle(y)
global datindex_Rpeak_image;
global step;
[dump,firstslice]=find(y,1);
[nPhase,nSlice]=size(y);
%Motion Curve
for i=1:nPhase
meanval_phase(i)=mean(y(i,firstslice:nSlice));
end
%Filtering 3-running point averaging
for i=1:nPhase
if i==1
temp=meanval_phase(2)+meanval_phase(1)+meanval_phase(nPhase);
elseif i==nPhase
temp=meanval_phase(1)+meanval_phase(nPhase)+meanval_phase(nPhase-1);
else
temp=meanval_phase(i+1)+meanval_phase(i)+meanval_phase(i-1);
end
meanval_phase2(i)=temp/3;
end
figure;plot(y,':');hold all
plot(meanval_phase,'-k','LineWidth',5);
plot(meanval_phase2,'-w','LineWidth',1);hold off
grid on;axis tight;
title('Motion Curve');xlabel('Phase %R-R');ylabel('Absolute Difference');
%Motion Map
%Global Phase selection
rat=0.5;
[dump,estmin]=min(meanval_phase2(round(nPhase*rat)+1:nPhase-1));
estmin=estmin+round(nPhase*rat);
gen_optphase=(estmin-1)*step;
create_R_shift_vector
67
Appendix A: Matlab Function
factor=input('mapping factor: ');
figure;
xaxis=firstslice:nSlice;yaxis=0:step:(nPhase-1)*step;
contourf(xaxis,yaxis,y(:,firstslice:nSlice).^factor);colorbar;hold all
plot(ones(1,nSlice)*gen_optphase,'-xr','LineWidth',1);
plot(carcycle_optphaseslice,'-xb','LineWidth',1);hold off
title('Motion Map');xlabel('k-Slice');ylabel('Phase %R-R');grid;
7.6.4.1 R-Shift Modification
%-------------------------------------------------------------------------%Program: create_R_shift_vector.m
%Cycle-dependent local phase selection and R-shift modification
%
%created by.Fahmi, Feb 05
%-------------------------------------------------------------------------count_index_Rpeak_image=datindex_Rpeak_image(:,gen_optphase);
i=2;
while i<=20
[maxslice_incycle,dump]=find(count_index_Rpeak_image(:,1)>i,1)
if maxslice_incycle >0
carcycle_slicemax(1,i)=maxslice_incycle-1;
else
break
end
i=i+1;
end
disp=(':::chose phase range:')
%cycle-dependent local phase selection
rangephase=input('phase range: ');
rangeph=floor((0.5*rangephase)/step);
%find slices in corresponds cycle
first_modph=find(carcycle_slicemax>=firstslice,1);
last_modph=find(carcycle_slicemax>=nSlice,1);
R_shift_vector=ones(20,1)*gen_optphase;
for phase=first_modph:last_modph
carcycle_slicestart=carcycle_slicemax(1,phase-1);
carcycle_sliceend=carcycle_slicemax(1,phase);
if phase==first_modph
carcycle_slicestart=firstslice;
end
if phase==last_modph
carcycle_sliceend=nSlice;
end
for i=-rangeph:rangeph %range of phases
carcycle_phase=estmin+i;
carcycle=y(carcycle_phase,carcycle_slicestart:carcycle_sliceend);
carcycle_meanval(i+(rangeph+1))=mean(carcycle);
end
[dump,temp]=min(carcycle_meanval);
carcycle_optphase=estmin+temp-(rangeph+1);
R_shift_vector(phase-1,1)=(carcycle_optphase-1)*step;
carcycle_optphaseslice(carcycle_slicestart:carcycle_sliceend)=R_shift_vector(phas
e-1,1);
end
68
Appendix B: CardioRecon Program
Appendix B : Cardiorecon Program
CardioRecon Ver: 2.12.1999
Authors: Thomas Flohr, Bernd Ohnesorge- Siemens Medical
“Cardio recon” is a program, which enables to reconstruct heart images from
scan data using Matlab. In this section its main function modes are described.
The CT-system and the corresponding version are selected.
The patient data are loaded here: including the corresponding ECG data
Some information about patient is displayed.
Scan parameters concerning the data acquisition are displayed.
The topogram button provides with the topogram of the scanned area.
Users can choose the reconstruction parameters: Field of View, x- and ycentre, position of the first and last computed images, image increment, slice
width and convolution kernel.
The start recon button enables to start reconstruction. The stop button
enables to interrupt reconstruction.
This part enables to select the ECG synchronisation strategy; here the phase
%RR input is determined.
The test series button enables to test a given synchronisation strategy with
different delay times. For a given z-position, the corresponding transaxial
images are provided.
This figure enables to visualise the ECG and the phases selected for
reconstruction.
69
Appendix C: Company Profile
Appendix C : Company profile- Siemens Medical
7.7
Siemens group
The Siemens company was founded in 1847 by Werner von Siemens in Berlin
(Germany) and was at the beginning a Telegraph company. Nowadays Siemens
is a network encompassing more than 430 000 people in 190 countries, in the
field of electrical engineering and electronics.
Siemens is one of the leaders in the field of electrical engineering and
electronics. Its main competitors are American and Japanese: GE, IBM, and
Hitachi.
Key Figures
The most important company figure from the financial highlights is shown in the
table below. Here described data for the last two years in comparison.
As a global player Siemens keep moving forward to develop its performance.
Year 2004 Siemens made a great achievement for increasing not only in net
sales and profit but also in the number equity and employees which shown its
strength as stable and solid company.
Sales By Region
Adjusted for currency effects and portfolio
activities, Siemens’ sales in fiscal 2004 climbed
3% to €75.2 billion. (Compare to €74.2billion a
year before, -- see table 1).
They totaled €17.1 billion in Germany, €13.6
billion in the U.S. and €9.3 billion in Asia-Pacific,
where China alone accounted for €2.9 billion.
Distribution of these sales by region shown more
detailed in next figure.
70
Appendix C: Company Profile
Employees
At the end of fiscal 2004, Siemens
had 430,000 employees worldwide.
Of this total, 62% (266,000) worked
outside
Germany.
Germany
accounted for 38% (164,000), the
other European countries for 26%
(110,000), the Americas for 22%
(95,000), Asia-Pacific for 12%
(52,000), and Africa, the Middle East
and the C.I.S. countries for about
2% (9,000).
Over two-thirds of our 430,000
employees have professional qualifications. Thirty-three percent (141,000) hold
university degrees. Twenty-four percent (103,000) are engineers or scientists.
Another 37% (158,000) have earned a vocational school diploma or completed
an apprenticeship. Slightly less than one-third (131,000) has qualifications
unrelated to their work or is without any prior professional training.
Bussiness Area
Siemens' business portfolio comprises different business divisions, which
enables it to offer a wide range of products, from mobile phones to power plants.
The group has a decentralised structure, in order to be as close as possible to
its customers.
Siemens’ operations are divided into six business areas:
• Information and Communications – comprising the Communications
Group and Siemens Business Services – provides the entire spectrum of
information and communications solutions.
• Automation and Control – comprising the Groups Automation and Drives,
Industrial Solutions and Services, Logistics and Assembly Systems, and
Siemens Building Technologies – supplies products, systems, solutions and
services for industrial and building automation.
• The Power business area – comprising the Groups Power Generation and
Power Transmission and Distribution – offers a comprehensive spectrum of
energy solutions, ranging from electricity generation to the transport of
electrical energy from power plant to consumer.
• The Transportation business area comprises the Groups Transportation
Systems (rail systems) and Siemens VDO Automotive (automotive systems).
With their wide array of products and services, both Groups are making
mobility more efficient and environmentally friendly.
• The Medical business area, comprising the Medical Solutions Group, is
renowned for its innovative products, complete solutions, services and
consulting for the healthcare community.
• The Lighting business area, comprising our subsidiary Osram, specializes
in lighting sources, related electronic control gear and light management
systems.
Other Siemens Business Unit :
• Our Financing and Real Estate activities are handled by Siemens Financial
Services and Siemens Real Estate.
• Major affiliates include BSH Bosch und Siemens Hausgeräte GmbH and
Fujitsu Siemens Computers (Holding) BV.
71
Appendix C: Company Profile
7.8
Siemens Medical Solutions
Siemens Medical Solutions is one of the largest suppliers of healthcare
equipment in the world. Healthcare represents a vital business activity of
Siemens. Siemens is renowned for its innovative products, services and
complete solutions, ranging from imaging systems for diagnosis and therapy
equipment for treatment, to hearing instruments to IT solutions that optimize
workflow and increase efficiency in hospitals, clinics and doctors' offices. Med
combine the latest breakthroughs in medical technology with state-of-the-art IT
technology to create efficient solutions for these healthcare system.
Beginning with the manufacture of electro medical devices in 1877, Siemens
Medical Solutions Group has become a leading healthcare solutions provider
worldwide. It sales and provides services in more than 120 countries.
Manufacturing plants are settled in 8 countries: Germany, USA, Sweden, Great
Britain, India, Spain, China and Singapore. The group counts more than 19000
employees throughout the world; its sales reached about 4 billion euros.
The Worldwide company key data for Siemens Medical Solutions in 2000/01
were:
Worldwide Company Key Data 2000/01
R&D Expenditure: € 614 million
Capital spending:
€ 321 million
Employees:
31.000
Germany:
8.000
For the year 2004 , Med again delivered more than €1 billion in full-year Group
profit, sales of €7.072 billion were up 6% year-over-year, excluding currency
translation and portfolio effects. Orders climbed to €8.123 billion, up 15% on a
comparable basis.
The sales made in Healthcare per region in % were:
U.S.A.
Europe without Germany
Germany
Japan
South East Asia
Latin America
49%
22%
10%
6%
6%
2%
72
Appendix C: Company Profile
The Group stands for innovative products, services and complete solutions. The
entire spectrum through imaging systems for diagnosis and therapy is covered,
electromedicine and audiology up to IT solutions, optimising work processes in
hospitals and medical practices and thus facilitating higher efficiency in
healthcare. The following pictures give an overview of the Siemens Medical
Solutions product range.
7.9
The business unit Computed Tomography
The Computed Tomography
U.S.A. /
Japan
division (CT) takes charge of
Canada
10,400
everything that is connected
33.600
with computed tomography
Latin
systems. The unit counts
America
2,250
approximately
1400
China
Europe
employees throughout the
2,800
Other
(-Germany )
German
world and from them about
countries
4,050
y
570 in Germany. Its turnover
4,300
CT scanners worldwide market
is about 1 billion euros and
85% of its sales are generated by export. 950 to 1000 units are produced each
year. CT Division constantly developing new and improved system in CT clinical
applications.
73
Appendix C: Company Profile
Siemens Med holds more than 25% of the market share worldwide. The
company is undeniably number 1 in Europe and number 2 throughout the world
for this product.
CT offers to its customers a wide product range. It doesn’t only provide CT
scanners, but also appropriate workstations and different accessories supported
the system. Here are examples of CT scanners, divided by SOMATOM Families
and non-SOMATOM families products
CT division provides not only the CT scanners, but also support them with
appropriate software and workstations to optimise user benefit from the system.
syngo®, is the unique software platform for medical systems and applications,
developed by Siemens Medical including for CT equipments, which integrates
patient-related, physiological, and imaging data across clinical workflow.
Several application packages are available, while the researchers inside Med
keep trying to develop new application and optimise the instrument function.
Here some list of application packages hat are now available and used
worldwide to help clinician doing their best analysing patients :
syngo Archiving &
Networking
Strict adherence to the
DICOM standard
provides seamless
workflow integration
syngo Pulmo CT
syngo Service Solutions
Pro-active remote
service and fast help on
case of malfunction online based on syngo
service software
HeartView CT
CARE Dose 4DTM
Minimizing dose,
maximizing quality –
patient by patient
syngo Perfusion CT
74
Appendix C: Company Profile
Quantitative evaluation
of lung density and
structure using
sequential or spiral data
sets
syngo LungCare CT
syngo LungCare CT with
NEV (Nodule Enhanced
Viewing)
syngo Vessel View
Automated 3D
evaluation of CT and MR
angiography data
syngo Osteo CT
Non-invasive method for
measuring the Bone
Mineral Density (BMD)
for lumbar spine
syngo Image Fusion
Combine Information
and enhance your
diagnosis - fast and easy
for routine use
ECG-controlled virtually
motion-free cardiac and
cardiovascular imaging
Comprehensive stroke
and brain tumor
assessment in less than
15 minutes
syngo Calcium Scoring
Coronary calcification
visualization and
quantification for
evaluation and follow-up
of coronary artery
disease
syngo Colonography
10 minutes from loading
to reporting
syngo Dental CT
Dedicated postprocessing and image
evaluation software for
teeth and the jaws with
documentation in true
anatomical size
syngo Argus Function
Automated quantitative
analysis of cardiac
function using CT or MR
images
syngo Fly Through
Take a new perspective
and enhance your
diagnosis - fast and easy
for routine
syngo Volume Calculation
Gain three-dimensional
volume information such
as size and mean CT
value from stack of twodimensional CT images
syngo 3D VRT
Advanced 3D
applications - fast and
easy for routine use
syngo InSpace 4D
Real-time Interactive
Cardiac Evaluation, in
Space and Time
Syngo optimizes efficiency at the workplace with its leading-edge incorporation
of recognized standards, such as DICOM, Windows™ and internet technologies;
and with Soarian™, syngo-based applications have access to an entirely new
dimension.
LEONARDO, is the syngo® post-processing workplace which enables quick
and exact diagnosis, with excellent post-processing of data from different
modalities. All workplaces from acquisition to post processing have the same
user interface.
75
Affidavit
1. I hereby declare that the following master thesis "Automatic
Optimum Phase Selection in Cardiac CT Imaging" has been
written only by the undersigned and without any assistance from
third parties.
2. Furthermore, I confirm that no sources have been used in the
preparation of this thesis other than those indicated in the thesis
itself.
Fahmi Noor
Forchheim, 19 April 2005