Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Ground (electricity) wikipedia , lookup
Buck converter wikipedia , lookup
Wireless power transfer wikipedia , lookup
Stray voltage wikipedia , lookup
Power factor wikipedia , lookup
Fault tolerance wikipedia , lookup
Audio power wikipedia , lookup
Voltage optimisation wikipedia , lookup
Power over Ethernet wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Overhead power line wikipedia , lookup
Single-wire earth return wikipedia , lookup
Electrification wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Distributed generation wikipedia , lookup
Power electronics wikipedia , lookup
Electric power system wikipedia , lookup
Three-phase electric power wikipedia , lookup
Electric power transmission wikipedia , lookup
Electrical grid wikipedia , lookup
Electrical substation wikipedia , lookup
Mains electricity wikipedia , lookup
Alternating current wikipedia , lookup
C ONTENTS
1 Introduction
4
2 Problem Formulation
2.1
2.2
2.3
2.4
5
Measurement Model and Assumptions . . . . . . . . .
Component Modeling and Assumptions . . . . . . . . .
2.2.1 Transmission lines . . . . . . . . . . . . . . . . .
2.2.2 Tap Changing and Phase Shifting Transformers
Network model . . . . . . . . . . . . . . . . . . . . . . . .
The Measurement Functions . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Choice of state estimator
3.1
3.2
3.3
3.4
Weighted least squares estimation . . . . . . . . . .
Weighted least absolute value estimator (WLAV) . .
Schweppe Huber generalised M (SHGM) estimator
Choice of estimator for distribution system . . . . .
5
6
6
7
8
9
12
.
.
.
.
.
.
.
.
12
13
13
13
4 Conclusions and further work
13
References
15
2
Abstract
Document provides an introduction to the state estimation problem in distribution power systems. Mathematical models of components comprising power
system are derived. A general state estimation problem is formulated. Different
algorithms already used in state estimation of transmission systems are briefly
compared. Weighted least squares (WLS) algorithm is reviewed in detail. Challenges and approaches that could address this challenges in future implementations of distribution state estimators are discussed.
Keywords: Distribution System State Estimation, WLS, WLAV, SHGM
3
1 I NTRODUCTION
The power grid is the infrastructure that transports electrical energy from generation plants to customers. The power grid is typically separated to transmission
and distribution grid. Transmission grid typically consists of generation plants
and high voltage (HV) transmission lines. Distribution system consists of residential and commercial customers, and medium and low voltage lines. Whereas
transmission system is active, because of generation plants, and complex, because of meshed topology, historically the distribution network was assumed
to be passive. In recent years distribution systems have been affected by many
significant changes. Energy market deregulation, increased penetration of renewable energy sources, and new energy resources, such as large batteries and
electric vehicles (EV) have caused the previously passive distribution grid to become highly complex and active. For the Distribution System Operator (DSO),
the company responsible for the distribution infrastructure, to effectively manage the distribution grid, it must have knowledge about the grid’s status, namely
bus voltages, line currents and power flows. Real-time knowledge of this parameters allows the DSO to apply number of actions, such as voltage control, congestion management, fault management, contingency analysis, etc.
The power system can be modelled as a linearized system, and a snapshot of
its status can be obtained using a state estimation algorithm. In regard to power
systems, state estimation has been extensively studied and widely implemented
in transmission grid. The same approach could be used in distribution systems.
However, there are inherent differences between the two systems that do not allow a straightforward implementation of known algorithms. Distribution system
characteristics affecting the state estimation are mainly
• High R/X. Lines and cables in distribution networks have predominantly resistive character, this eliminates the possibility of adopting simplifications
commonly used in the estimators developed for transmission systems.
• Imbalance. Presence of non-symmetrical loads causes the non-symmetrical
three-phase electrical quantities. This characteristic is made worse with
growth of distributed generation. Most state estimation implementations
are based on the assumption of phase symmetry. This assumption allows
representation of three-phase system with single line diagram (SLD) and in
effect reduces computational load.
• Large number of nodes. Distribution systems are typically very large networks with high number of buses. This, in combination with three-phase
approach, leads to very large systems that require a lot of computational
time for solving.
• Low number of measurement nodes. To achieve network observability and
sufficient redundancy, adequate number of measurement nodes must be
installed in the system. However, because of the related costs, the DSO
wants to keep this number to a minimum. Second source of measurements
4
are so-called pseudo measurements. These are non-real time estimates, derived from some prior knowledge. They are at least an order of magnitude
less accurate than real measurements.
In development of a state estimator suitable for deployment in distribution
power systems this characteristics need to be considered.
Document’s content is as follows. In section 2 the state estimation problem is
formulated, component models are developed and assumptions about them are
stated. Further on, the measurement model is developed. In section 3 several
state estimation algorithms used in transmission systems are reviewed and compared. The WLS is chosen as a possible candidate for application in distribution
systems. Section 4 discusses current implementation challenges and possible
solutions.
2 P ROBLEM F ORMULATION
Power network status is known, when all its system variables (bus voltage phasors, or branch current phasors) are known. This information could be obtained
by installing measurement devices (phasor measurement units (PMUs), or wide
area measurement systems (WAMS)) that can measure voltage phasors and continuously send them to the control center. The drawback of this approach would
be its vulnerability to measurement errors and telemetry failures. By adding
measurements we could increase the robustness of the system. However this
increases the overall costs. Alternatively, we can add weighted pseudo measurements (and even reduce the number of real measurements) and use the estimation theory to deduce the state of the system.
2.1 M EASUREMENT M ODEL AND A SSUMPTIONS
In order to deduce the state of the system from its output we need to establish a
relation between its output and state variables. In general this relation is nonlinear and can be written as
z1
h 1 (x 1 , x 2 , . . . , x n )
w1
z 2 h 2 (x 1 , x 2 , . . . , x n ) w 2
z = . =
(2.1)
..
+ .. = h(x) + w
.
.
.
.
zm
h m (x 1 , x 2 , . . . , x n )
wm
where z k is a measurement of the system’s output, h k (x 1 , x 2 , . . . , x N ) is the nonlinear function relating measurement k to the state variables, and w ∼ N (0, R)
is noise contribution to the measurement k. Noise contribution is assumed to
be Gaussian, zero mean, with covariance matrix R(= d i ag {σ21 , σ22 , . . . , σ2m }). We
define the normalised residual of ith measurement r i as
5
z i − h i (x)
(2.2)
σi
where, r i ∼ N (0, 1). The class of estimators discussed, are based on maximum
likelihood theory. They rely on a priori knowledge of the distribution of the measurement error. A generalised estimation problem seeks to minimise the following objective function
m
∑
J=
ρ(r i )
(2.3)
ri =
i =1
Different estimators can be characterised on the choice of the ρ function.
2.2 C OMPONENT M ODELING AND A SSUMPTIONS
To apply the state estimation algorithm to the power system, selection of state
variables x, output variables z, and derivation of the measurement functions
h k (x 1 , x 2 , . . . , x N ) are necessary. For state variables, voltage phasors i.e. voltage
magnitudes V and phase angles θ are selected. But we could also select branch
currents and their phase angles. For output variables, real P i and reactive Q i
power injections and real P i j and reactive Q i j power flows are selected. To derive the measurement functions that relate output variables to state variables we
need to model the basic components of the power system. All of the network data
as well as the state variables are expressed in the per unit system.
2.2.1 T RANSMISSION LINES
A transmission line has four parameters which affect its ability to fulfill its function: series resistance and inductance, and shunt capacitance and conductance.
The resistance of transmission-line conductors is the most important cause of
power loss in a transmission line. The effective resistance of a conductor is
R=
power l oss i n cond uc t or
[Ω]
|I |2
(2.4)
where the power is in watts and I is the root mean square (RMS) current in the
conductor in amperes. The calculation of inductance of the line requires quite a
few steps and can be found in (Grainger & Stevenson, 1994). Capacitance is the
result of the potential difference between two conductors. An alternating voltage
applied to a transmission line causes the charge on the conductors at any point
to increase and decrease with the increase and decrease of the applied voltage at
the point. The flow of charge is current and the current caused by the alternate
charging and discharging of the line is called a charging current.
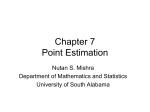
All of the mentioned parameters can be modeled with a two-port π-model. The
equivalent circuit is shown in Figure 2.1. The nodal equations of the two port
circuit are as follows
[ ] [
][ ]
ii
y i j + y si
−y i j
vi
=
(2.5)
ij
−y i j
yi j + y s j v j
6
Figure 2.1: π-model of the transmission line
where y i j = g i j + b i j and y si = g si + b si .
Flow of apparent power Si j between buses i and j can be written as
Si j = Sshunt + S f l ow
= V2i Y∗s + Vi I∗i j
= V2i (g si
(
− j b si ) + Vi Vi − V j e
)
− j Θi j ∗
(2.6)
(g i j − j b i j )
considering the equation S = P + j Q separate expressions for real and reactive
power can be written
P i j = Vi2 (g si + g i j ) − Vi V j (g i j cosθi j + b i j si nθi j )
Q i j = −Vi2 (b si + b i j ) − Vi V j (g i j si nθi j − b i j cosθi j )
(2.7)
This form relates the state variables (Vi ,V j and θ) with the real power flow P i j
and reactive power flow Q i j output variables.
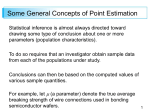
2.2.2 TAP C HANGING AND P HASE S HIFTING T RANSFORMERS
Transformers with in-phase taps, can be modeled as series impedances in series
with ideal transformers as shown in Figure 2.2.
Figure 2.2: Equivalent circuit for a tap transformer
The nodal equations of the two port circuit are as follows
[ ] [
][ ]
il j
yi j
−y i j v i
=
ij
−y i j
yi j
vj
(2.8)
7
where y i j = g i j + j b i j . We can express i l j and i j as
il j = a · ii
/
vl = vi a
(2.9)
in final form the equations are
[ ] [ / 2
ii
yi j a
/
=
ij
−y i j a
/ ][ ]
−y i j a v i
yi j
vj
(2.10)
For a phase shifting transformer where the tap value a is complex, we can express
i l j and i j as
il j = a∗ · ii
/
(2.11)
vl = vi a
we get the following set of equations
[ ] [ / 2
ii
y i j |a|
/
=
ij
−y i j a
/ ][ ]
−y i j a ∗ v i
yi j
vj
(2.12)
2.3 N ETWORK MODEL
The developed two-port sub-circuit admittance models for tap transformer and
transmission line are used to model the entire power system. This is accomplished by writing a set of bus current equations by applying Kirchhoff’s current
law at each bus
v1
Y11 Y12 . . . Y1N
i1
Y
Y
.
.
.
Y
i
2 21
22
2N v 2
. = .
(2.13)
.
.
..
. = Y·V
. .
..
..
. ..
. .
vN
YN 1 YN 2 . . . YN N
iN
where i k is the net current injection (sum of all currents that flow into the bus
minus sum of all currents that flow out of the bus) at bus k, and v k is the voltage at bus k. The bus admittance matrix (Y ) can be formed by adding the twoport sub-circuits, one at a time, and modifying the corresponding entries of the
system admittance matrix Y . To add a tap transformer sub-circuit, the system
admittance matrix is modified in a following way
/
Yinew
= Yi i + y i j |a|2
i
/
Yinew
= Yi j − y i j a ∗
j
/
Y jnew
= Y j i − yi j a
i
(2.14)
Y jnew
= Y j j + yi j
j
8
to add a transmission line sub-circuit, the modification of Y is as follows
Yinew
= Yi i + y i j + y si
i
Yinew
= Yi j − y i j
j
(2.15)
Y jnew
= Y j i − yi j
i
Y jnew
= Y j j + yi j + y s j
j
Apparent power Si on a bus i is
Si = Vi I∗i = Vi
N
∑
j =1
Yi j V j
(2.16)
where N is the number of buses, Yi j is the corresponding element of the admittance matrix (not the branch admittance). Splitting the apparent power into its
real and reactive part we get
P i = Vi
Q i = Vi
N
∑
j =1
N
∑
j =1
V j (G i j cosθi j + B i j si nθi j )
(2.17)
V j (G i j si nθi j − B i j cosθi j )
This form relates the state variables (Vi , V j , and θ) with the real and reactive
power injections (P i and Q i ).
2.4 T HE M EASUREMENT F UNCTIONS
Gauss-Newton method 3.5 requires measurement functions derivatives (with respect to the state variables). The derivation are as follows
• Real power injection elements:
N
∑
∂P i
= Vi
V j (−G i j si nθi j + B i j cosθi j ) − Vi2 B i i
∂Θi
j =1
∂P i
= Vi V j (G i j si nθi j − B i j cosθi j )
∂Θ j
N
∂P i ∑
=
V j (G i j cosθi j + B i j si nθi j ) + Vi G i i
∂Vi j =1
(2.18)
∂P i
= Vi (G i j cosθi j + B i j si nθi j )
∂V j
9
• Reactive power injection elements:
N
∑
∂Q i
= Vi
V j (G i j cosθi j + B i j si nθi j ) − Vi2G i i
∂Θi
j =1
∂Q i
= Vi V j (−G i j cosθi j − B i j si nθi j )
∂Θ j
N
∂Q i ∑
=
V j (G i j si nθi j − B i j cosθi j ) − Vi B i i
∂Vi
j =1
(2.19)
∂Q i
= Vi (G i j si nθi j − B i j si nθi j )
∂V j
• Real power flow elements:
∂P i j
∂Θi
∂P i j
∂Θ j
∂P i j
∂Vi
∂P i j
∂V j
= Vi V j (g i j si nθi j − b i j cosθi j )
= −Vi V j (g i j si nθi j − b i j cosθi j )
(2.20)
= −V j (g i j cosθi j + b i j si nθi j ) + 2(g i j + g si )Vi
= −Vi (g i j cosθi j + b i j si nθi j )
• Reactive power flow elements:
∂Q i j
∂Θi
∂Q i j
∂Θ j
∂Q i j
∂Vi
∂Q i j
∂V j
= −Vi V j (g i j cosθi j − b i j si nθi j )
= Vi V j (g i j cosθi j − b i j si nθi j )
(2.21)
= −V j (g i j si nθi j − b i j cosθi j ) − 2(b i j + b si )Vi
= −Vi (g i j si nθi j − b i j cosθi j )
• Voltage elements:
∂Vi
∂Vi
∂Vi
∂Vi
= 1,
= 0,
= 0,
=0
∂Vi
∂V j
∂Θi
∂Θ j
(2.22)
10
All derivatives are functions of bus voltage magnitudes V and angles θ. We can
now construct the Jacobian H matrix
∂P i
∂Θ1
.
..
∂P j
∂Θ1
∂Q k
∂Θ
1
..
.
∂Q l
∂Θ1
∂P
mn
∂Θ1
.
(k)
H(x ) =
..
∂P op
∂Θ1
∂Q r s
∂Θ1
.
..
∂Q t u
∂Θ
1
0
.
.
.
0
...
..
.
...
...
..
.
...
...
..
.
...
...
..
.
...
...
..
.
...
∂P i
∂ΘN −1
∂P i
∂V1
∂P j
∂ΘN −1
∂Q k
∂ΘN −1
∂P j
∂V1
∂Q k
∂V1
∂Q l
∂ΘN −1
∂P mn
∂ΘN −1
∂Q l
∂V1
∂P mn
∂V1
∂P op
∂ΘN −1
∂Q r s
∂ΘN −1
∂P op
∂V1
∂Q r s
∂V1
∂Q t u
∂ΘN −1
∂Q t u
∂V1
∂Vv
∂V1
..
.
..
.
..
.
..
.
0
..
.
0
..
.
..
.
..
.
..
.
..
.
0
...
..
.
...
...
..
.
...
...
..
.
...
...
..
.
...
...
..
.
...
∂P i
∂VN
..
.
∂P j
∂VN
∂Q k
∂VN
..
.
∂Q l
∂VN
∂P mn
∂VN
..
.
∂P op
∂VN
∂Q r s
∂VN
..
.
∂Q t u
∂VN
0
..
.
(2.23)
∂Vz
∂VN
where
• N is the number of buses.
• i is the first index of the real power injection measurements.
• j is the last index of the real power injection measurements.
• k is the first index of the reactive power injection measurements.
• l is the last index of the reactive power injection measurements.
• mn is the first index of the real power flow measurements.
• op is the last index of the real power flow measurements.
• r s is the first index of the reactive power flow measurements.
• t u is the last index of the reactive power flow measurements.
• v is the first index of the voltage magnitude measurements.
• z is the last index of the voltage magnitude measurements.
11
3 C HOICE OF STATE ESTIMATOR
3.1 W EIGHTED LEAST SQUARES ESTIMATION
WLS minimizes the sum of weighted squares of the residuals. The problem can
be stated as the minimization of the following objective function
J (x) =
m
∑
i =1
2
R i−1
i ri
(3.1)
T
−1
= (z − h(x)) R (z − h(x))
Minimum of the cost function can be obtained by deriving it with respect to x,
setting it to zero and solving it for x. Since the measurement functions are in
general nonlinear the Gauss-Newton algorithm will be used. Gauss-Newton algorithm iteratively finds the minimum of the cost function J (x). Starting with an
initial guess x(0) for the minimum, the method proceeds with
(
)−1
x(k+1) = x(k) − J(k)T J(k) J(k)T R−1 r(x(k) )
(3.2)
where, if r and x are column vectors, the Jacobian matrix elements (for the k-th
iteration) are
∂R i−1
r (x(k) )
i i
=
J i(k)
(3.3)
j
∂x j
applied to our case
J i(k)
j
=
(
)
∂R i−1
z i − h i (x(k) )
i
∂x j
(3.4)
(k)
= −R i−1
i Hi j (x )
/
where Hi j (x(k) ) = ∂h i (x(k) ) ∂x j . Using 3.2 we write
([
]T [
])−1 [
]T
x(k+1) = x(k) + H(x(k) )R−1
H(x(k) )R−1
H(x(k) )R−1 R−1 r(x(k) )
(
)−1
(
)
= x(k) + HT (x(k) )R−1 H(x(k) ) HT (x(k) )R−1 z − h(x(k) )
(3.5)
= x(k) − G(x(k) )−1 g(x(k) )
where
G(x(k) ) = HT (x(k) )R−1 H(x(k) )
(
)
g(x(k) ) = −HT (x(k) )R−1 z − h(x(k) )
(3.6)
and G is called the gain matrix. It is sparse, positive definite and symmetric, when
the system is observable. To avoid the computation of inverse of G we rearrange
∆x(k+1) = x(k+1) − x(k)
(3.7)
and insert the third form of 3.5 into it
G(x(k) )∆x(k+1) = −g(x(k) )
(
)
= HT (x(k) )R−1 z − h(x(k) )
(3.8)
12
This system of linear equations is referred to as the normal set of equations, and
can be solved using any of the well known methods. A note on solubility: the
system will have a unique solution if it is observable. The system is observable
when the G matrix has full rank.
3.2 W EIGHTED LEAST ABSOLUTE VALUE ESTIMATOR ( WLAV )
WLAV estimator is based on the minimization of the L 1 norm of the weighted
measurement residual, and can be expressed as
¯¯
¯¯
¯¯ 1/2
¯¯
(3.9)
¯¯R [z − h(x)]¯¯
1
which is equivalent to 2.3 when
ρ(r i ) = |r i |
(3.10)
This optimization problem can be solved using linear programming methods.
3.3 S CHWEPPE H UBER GENERALISED M (SHGM) ESTIMATOR
This estimator combines both WLS and WLAV estimators. The ρ function for
SHGM is given by
ρr i =
1 2
2 ri
αωi |r i | − 12 α2 ω2i
if |r i | ≤ αωi
otherwise
The performance of this estimator highly depends upon the weight factor ωi and
tuning parameter α. Solution to this problem can be obtained using iteratively
re-weighted least squares method.
3.4 C HOICE OF ESTIMATOR FOR DISTRIBUTION SYSTEM
In transmission systems, all the estimators work well because of very high redundancy. But in distribution systems, the measurements are mainly the pseudo
measurements with very limited redundancy. Since pseudo measurements are
derived from the historical load profiles, they can be erroneous. It has been
shown in (Singh, Pal, & Jabr, 2009) that WLS gives consistent and better quality performance when applied to distribution systems. Hence, WLS is found to
be a suitable solver for the distribution system state estimation problem.
4 C ONCLUSIONS AND FURTHER WORK
The WLS state estimation algorithm was implemented and tested on a section of
real distribution network. In the process of implementation and testing we experienced the implications of challenges stated in the 1 section of this document.
13
As opposed to transmission systems, where system state changes slowly because of load aggregation, the closer to the actual customer we are, the more
volatile the electric quantities are. This in turn requires a much shorter state estimation period, if we are to track the system state truthfully. This adds to computational load.
In terms of buses and branches, distribution networks are larger than transmission networks. Increased number of buses and branches increases computational requirements for state estimation calculation.
In transmission systems, state estimation is calculated on the assumption that
the three phase system is symmetrical. This assumption does not hold true in
distribution systems, because there are a lot more single phase loads. From the
state estimation perspective, this means that an estimation for each phase is necessary. This again, increases the computational load, and adds to the complexity
of the system, since phases can be magnetically coupled.
Several approaches were proposed in the literature to reduce the computational load. Change of state variables from bus voltages to branch currents would
simplify some measurement functions and thus reduce the computation time.
Choice of different estimation algorithm or different implementation of an existing one could also achieve speed up. Recursive algorithms were proposed but not
yet widely tested, much less adopted. Final resort to speed up could be efficient
parallel implementation of an algorithm.
Another challenge associated with high number of buses is number of necessary measurement nodes installed, to make the system observable. Several
approaches to minimize the number of installed measurement nodes were proposed in the literature. Mostly this methods rely on forecasting and modelling
techniques that allow formation of pseudo measurements from historical data
and other data sources, such as weather forecast, etc. Few of this methods were
tested in real world for accuracy.
Finally, a full blown state estimator that could run in the DSO control center
will require additional functionalities such as observability analysis, measurement placement, and bad data detection. Like state estimation this functionalities have been studied and are implemented in transmission systems, but will
require modifications or, in some cases, completely new approaches, to be implemented in the distribution systems.
14
R EFERENCES
Ali, A., & Exposito, G. (2004). Power system state estimation: Theory and implementation. Marcel Dekker.
Baran, M. E., & Kelley, A. W. (1995). A branch-current-based state estimation
method for distribution systems. IEEE Transactions on Power Systems, 10,
483-491.
Dan, S. (2006). Optimal state estimation: Kalman, h [infinity] and nonlinear
approaches. Marcel Dekker.
Gjelsvik, A., Aam, S., & Holten, L. (1985). Hachtel’s augmented matrix methoda rapid method improving numerical stability in power system static state
estimation. IEEE Transactions on Power Apparatus and Systems, 11, 29872993.
Grainger, J., & Stevenson, W. (1994). Power system analysis. McGraw-Hill.
Holten, L., Gjelsvik, A., Aam, S., Wu, F., & Liu, W. (1988). Comparison of different
methods for state estimation. IEEE Transactions on Power Systems, 3, 17981806.
Lu, C. N., Teng, J. H., & Liu, W. H. E. (1995). Distribution system state estimation.
IEEE Transactions on Power Systems, 10, 229-240.
Schweppe, F. (1970a). Power system static-state estimation, part iii: Implementation. IEEE Transactions on Power Apparatus and Systems, 1, 130-135.
Schweppe, F. (1970b). Power system static-state estimation, part ii: The approximate model. IEEE Transactions on Power Apparatus and Systems, 1.
Schweppe, F. (1970c). Power system static-state estimation, part i: The exact
model. IEEE Transactions on Power Apparatus and Systems, 1.
Singh, R., Pal, B. C., & Jabr, R. A. (2009). Choice of estimator for distribution
system state estimation. IET Generation, Transmission & Distribution, 3,
666-678.
Smith, O. (1970). Power system state estimation. IEEE Transactions on Power
Apparatus and Systems, 3, 363-379.
15